Файл: Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2020
Просмотров: 5997
Скачиваний: 170

фазовых координат, используемых для получения сигналов управления наво
димыми ЛА и выдачи команд целеуказания сопрягаемым объектам;
в) управления ЛА в рамках решаемых оперативных и тактических задач [22].
Функциональные связи между составными частями ИУС АК РЛДН пока
заны на упрощенной структурной схеме, приведенной на рис. 6.8, где САД -
системы автономных датчиков, формирующие оценки параметров собственно
го движения; КРУ - командная радиолиния управления, через которую осуще
ствляется передача команд на наводимые ЛА (см. 5.5); СРТР - станция радио
технической разведки, осуществляющая обнаружение источников радиоизлу
чений, в том числе постановщиков помех, и оценивание параметров
принимаемых сигналов; РЛС, ОЭС и НС - радиолокационная, оптико-элект
ронная и навигационные системы соответственно, решающие основные ин
формационные задачи по обеспечению управления АК РЛДН и наведению ЛА;
КРЭБ - комплекс радиоэлектронной борьбы, который используется не только
для радиоэлектронного подавления РЛС противной стороны, но и совместно с
РЛС для организации так называемой активной помехозащиты, дающей воз
можность бортовой РЛС получать информацию о цели в условиях применения
противником средств РЭП; ВВС - бортовая вычислительная система, решаю
щая большую часть задач обработки информации и управления; БД - база дан
ных; СИППР - система интеллектуальной поддержки принятия решения [5, 6],
Рис. 6.8
формирующая рекомендации для лиц боевого расчета; СНВЦ и СННЦ - сис
темы наведения на воздушные и наземные цели; СУСЛА - система управления
сопрягаемыми летательными аппаратами, представляющая совокупность алго
ритмов формирования команд целеуказаний и управления другими АК РЛДН,
самолетами-заправщиками, ретрансляторами и беспилотными летательными
аппаратами; СОУУ - система оценки и устранения угроз, содержащая алго
ритмы ранжирования воздушных и наземных целей по степени их опасности на
основе информации, поступающей от РЛС, ОЭС и СРТР, и формирующая ко
манды на управление истребителями прикрытия, на использование маневров
уклонения и применения собственного КРЭБ; АРМШС и АРМШН - автомати
зированные рабочие места штурманов сопровождения целей и наведения, на
индикаторах которых отображается вся информация, используемая при сопро
вождении и идентификации целей с учетом степени их опасности и благопри-
ятствия для поражения и при принятии решений на управление АК РЛД и на
водимыми самолетами и контроля выполнения задач.
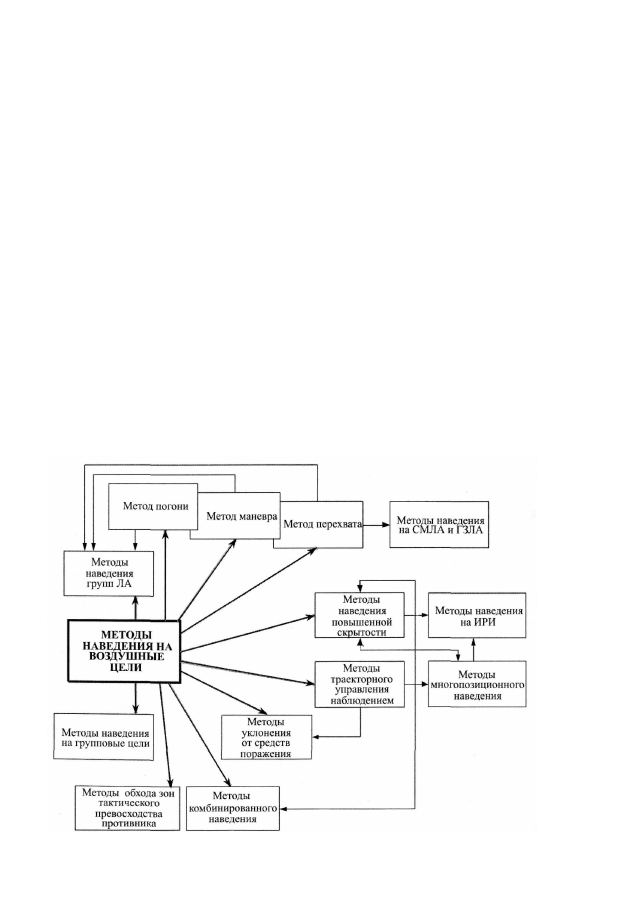
Система наведения на воздушные цели представляет собой совокупность
алгоритмов, реализующих методы наведения управляемых ЛА на воздушные
объекты. Из этих методов можно выделить как традиционные методы погони,
маневра и перехвата, рассмотренные в 5.2.2, так и новые. Состав этих методов
и их взаимосвязи иллюстрирует рис. 6.9.
Рис.
6.9

Наведение групп ЛА выполняется посредством управления самолетами
командиров групп, которые осуществляют взаимодействия с остальными само
летами группы либо голосом, либо посредством ТКС [5].
Необходимость обслуживания сверхманевренных и гиперзвуковых лета
тельных аппаратов (ГЗЛА) приводит к использованию усовершенствованных
методов перехвата, в которых, как минимум, должны учитываться относи
тельные ускорения целей и наводимых ЛА [44]. Это обстоятельство потребует
использования в информационных режимах БРЛС и ОЭС алгоритмов обнару
жения маневров и оценивания вторых производных отслеживаемых координат.
Кроме того, потребности бессрывного сопровождения ГЗЛА приводят к необ
ходимости принятия мер по расширению диапазона скоростей и ускорений ус
тойчивой работы систем сопровождения целей и уменьшению временного ин
тервала обращения к ним.
Необходимость повышения скрытности процедур наведения обусловлена
требованиями повышения их боевой эффективности и живучести. Для решения
этих задач могут быть использованы различные приемы как однопозиционного,
так и многопозиционного наведения с применением полуактивных и пассивных
режимов работы информационных систем; кроме того, могут быть использованы
и специальные приемы повышения скрытности передачи команд управления на
наводимые ЛА. Более подробно эти вопросы рассмотрены в п. 7.2.
Существенное возрастание номенклатуры воздушных радиоизлучающих
целей, включая постановщиков помех, предопределяют необходимость исполь
зования специальных методов наведения на них, учитывающих особенности их
перемещения в пространстве. Следует отметить, что при перехвате движущих
ся воздушных источников радиоизлучений (ИРИ), могут быть использованы
как однопозиционные, так и многопозиционные системы наведения.
Однако в любом случае для всеракурсного перехвата движущихся воз
душных объектов необходимо иметь достаточно точные оценки дальности и
скорости, что является непростой задачей в условиях, когда в пассивном режи
ме измеряются только угловые координаты ИРИ. Использование однопозицио-
ных систем наведения требует выполнения достаточно длительного маневра
наводимого самолета и не позволяет получить высокую точностью оценивания
дальности и скорости.
Более эффективным является использование многопозиционных (как пра
вило, двухпозиционных) систем наведения, дающих возможность практически
мгновенно сформировать более точные оценки дальности и скорости. Необхо
димо, однако, подчеркнуть, что для повышения точности оценивания дально
сти и скорости один или оба носителя должны выполнять специальный маневр
[42]. Алгоритмы траекторного управления, направленные не только на решение
основных задач перехвата, но и на получение траекторий, обеспечивающих
наилучшие условия для функционирования информационных систем, получи
ли название алгоритмов траекторного управления наблюдением [39]. Исполь-

ование этих алгоритмов дает возможность улучшить показатели эффективно
сти систем наведения практически без улучшения тактических и технических
юказателей БРЛС и ОЭС.
Следует, однако, отметить, что использование многопозиционного прин
ципа наведения, давая существенное улучшение показателей эффективности и
кивучести, приводит к значительному усложнению алгоритмов управления.
Это усложнение предопределено появлением еще одного более высокого ие-
»архического управленческого уровня, усложнением процедур взаимной син-
;ронизации и обмена информацией. Кроме того, использование многопозици-
>нных систем наведения приводит к значительному ухудшению показателей
1Кономичности, поскольку требует, как минимум, удвоенного расхода топлива
ι ресурса носителей и информационных систем.
Одним из способов устранения угроз является обход зон тактического
[ревосходства воздушного противника. Суть этого способа состоит в заблаго-
;ременном обходе областей пространства, в которых наши ЛА могут быть об-
[аружены информационными средствами противника, превосходящего нас ли-
ю численностью, либо по летно-техническим характеристикам самолетов и
>ружия. Следует подчеркнуть, что для использования этого приема необходи-
10 иметь неизлучающие пассивные средства обнаружения большой дальности
ι высокодостоверные алгоритмы идентификации обнаруженных целей, вплоть
(о их типа. Другим способом устранения угроз является использование манев-
)ов уклонения [46].
Спецификой наведения ЛА на большие группы неразрешаемых целей яв-
[яется необходимость информации о пространственных размерах группы. При
[аличии такой информации наведение самолетов осуществляется на головную
[асть группы, а наведение средств поражения - на геометрический или энерге-
ический центр группы. Рациональным приемом высокоточного индивидуаль-
юго наведения является использование траекторного управления наблюдени-
!М, обеспечивающего разрешение целей в плотной группе [41].
Перспективным, но достаточно сложным методом повышения эффектив-
юсти наведения является использование так называемого метода комбиниро-
1анного наведения, базирующегося как на командах, поступающих от АК
'ЛДН, так и на сигналах управления, формируемых на самом наводимом само-
[ете с использованием своих информационных средств. Сложность такого
гоиема состоит в необходимости применения универсального метода наведе-
шя, инвариантного к пространственному положению источников информации.
Система наведения на наземные цели представляет совокупность алго-
штмов управления Л А в процессе их наведения на наземные объекты. В об-
цем случае наводимыми ЛА могут быть самолеты-штурмовики, фронтовые и
(альние бомбардировщики и многофункциональные истребители при работе
ю наземным целям, а также ударные БЛА [3]. Управление этими самолетами
юуществляется в процессе их полета по маршруту в район цели и далее непо-

средственно в область применения средств поражения. Информационные связи
между различными методами наведения, используемыми в режимах «воздух-
поверхность», показаны на рис. 6.10.
Рис. 6.10
При управлении ЛА на маршруте используются в основном методы авто
номного наведения. Суть этих методов состоит в том, что в процессе полета
команды управления формируются на самих ЛА в соответствии с тем или
иным методом наведения. Из этих методов наиболее употребительны мар
шрутный, курсовой и путевой [45].
При маршрутном методе наведение выполняется по жестко фиксирован
ной траектории полета (ортодромии), намечаемой заранее до полета. Управле
ние при этом методе сводится к регистрации отклонений от программной тра
ектории и их устранению. Суть курсового метода состоит в совмещении про
дольной оси наводимого ЛА с направлением на цель. При использовании
путевого метода с направлением на цель совмещается вектор путевой скоро
сти управляемого самолета. Управляющая роль АК РЛДН сводится к периоди
ческой передаче на борт наводимых ЛА корректирующих команд или передаче