Добавлен: 25.10.2023
Просмотров: 216
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
(ВолгГТУ)
кафедра " Автоматические установки "
Реферат на тему:
“Емкостные преобразователи”
Выполнил: студент группы РК- 500
Козлита С.Н.
Проверил: преподаватель
Кошман А.М.
Волгоград, 2022
Содержание
Введение 3
1 Общие сведения 4
2 Емкостные преобразователи 7
2.1 Принцип работы емкостного измерителя 7
2.3 Разновидности датчиков 9
2.3.1 Классификации 9
2.3.1 Одноемкостные датчики 9
2.3.2 Двухемкостные датчики 10
2.3.3 Датчики уровня 11
2.3.4 Емкостные датчики давления 11
2.3.5 Емкостные датчики прикосновения 12
3 Возможные сферы применения датчиков 14
Заключение 16
Список использованных источников 18
Введение
Техника конструирования и применения датчиков, или, как ее можно кратко назвать, сенсорика, за последние годы развилась в самостоятельную ветвь измерительной техники. С ростом автоматизации к датчикам физических параметров стали предъявляться все более высокие требования. При этом особое значение придается следующим показателям:
-
миниатюрность (возможность встраивания) -
дешевизна (серийное производство) -
механическая прочность
По структурному построению автоматизированные устройства напоминают такие биологические системы, как, например, человек. Органам чувств человека соответствуют в автоматах (или роботах) датчики, а функции активных органов выполняются исполнительными устройствами. Аналогом мозга как центрального устройства для обработки сигналов служит ЭВМ с ее системой памяти.
Емкостной датчик, как его определяет Большая Советская Энциклопедия, — измерительный преобразователь, позволяющий неэлектрические величины перевести в значения электрической емкости. Например, такие как давление, уровень жидкости, механическое усилие, влажность, и прочие. Изменения емкости оказываются пропорциональны колебаниям измеряемой величины, и это соответствие позволяет отследить ее поведение.
1 Общие сведения
Понятием “датчик” в общем случае обозначают дешевый, но надежный приемник и преобразователь измеряемой величины, обладающий умеренной точностью и пригодный для серийного изготовления. Общеупотребительные термины и определения для различных датчиков четко сформулированы в Инструкции 2600 Общества немецких инженеров и Общества немецких электриков ФРГ (VDI/VDE-Richtline 2600).
Измерительный прибор осуществляет преобразование входного сигнала x(t) в выходной сигнал y(t):
y(t) = F[x(t)], (1)
где x(t) и y(t) - векторные величины; F(x) - требуемая функция преобразования. На выражение (1) можно смотреть на информационную модель прибора, в которой осуществляется преобразование входной информации в выходную.
В более общей формулировке прибор осуществляет операцию отображения множества сигналов на входе xX в множество сигналов на выходе yY, при этом указанное отображение должно быть однозначным.
В реальных приборах функция преобразования зависит не только от сигнала x(t), но также от возмущения (t) на сигнал x(t), от помехи (t), действующей на параметры прибора q(t), от несовершенства технологий изготовления прибора (t) и от помехи (t), возникающих в самом приборе (трения, паразитных ЭДС и др.). В соответствии с рисунком 1 приведена зависимость:
y(t) = F[x,,q(,),)], (2)
где ,q,,, - векторы.
Измеряемыми величинами, на основе которых формирует полезный сигнал х(t), являются параметры первичной информации, такие, как давление, температура, количество и расход жидкостей, линейные н угловые размеры, расстояния, скорости, ускорения, деформации, напряжения, вибрации, внутренние трещины, несплошности в материалах и др. К числу вредных возмущений относятся перегрузки, вибрации, электрические и магнитные поля, неконтролируемые вариации температуры, давления, влажности окружающей среды и т. д. Все эти возмущения вносят погрешности в показания приборов.
Рисунок 1 – Функциональная схема прибора.
Прибор должен воспроизводить измеряемые величины с допускаемыми погрешностями. При этом слово “воспроизведение”, эквивалентное в данной трактовке слову “отображение”, понимается в самом широком смысле: получение на выходе прибора величин, пропорциональных входным величинам; формирование заданных функций от входных величин (квадратичная и логарифмическая шкалы и др.); получение производных и интегралов от входных величин; формирование на выходе слуховых или зрительных образов, отображающих свойства входной информации; формирование управляющих сигналов, используемых для управления контроля; запоминание и регистрация выходных сигналов.
Измерительный сигнал, получаемый от контролируемого объекта, передается в измерительный прибор в виде импульса какого- либо вида энергии. Можно говорить о сигналах: первичных - непосредственно характеризующих контролируемый процесс; воспринимаемых чувствительным элементом прибора; подаваемых в мерительную схему, и т.д. При передаче информации от контролируемого объекта к указателю прибора сигналы претерпевают ряд изменений по уровню и спектру и преобразуются из одного вида энергии в другой.
Необходимость такого преобразования вызывается тем, что первичные сигналы не всегда удобны для передачи, переработки, дальнейшего преобразования и воспроизведения. Та часть прибора, в которой первичный сигнал преобразуется, например, в электрический, называется первичным преобразователем. Часто этот преобразователь совмещается с чувствительным элементом. Сигналы с выхода первичного преобразователя поступают на следующие преобразователи измерительного прибора.
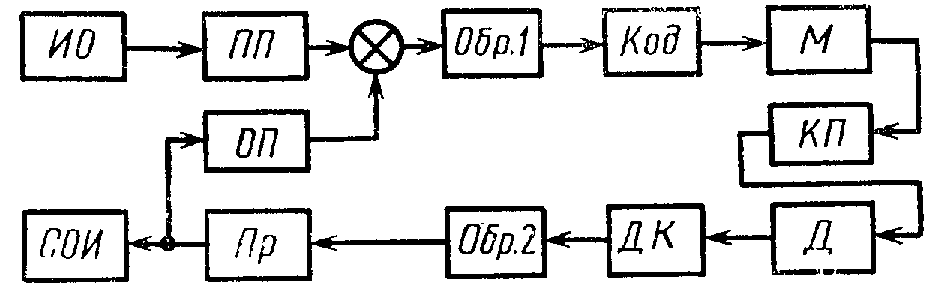
Рисунок 2 – Функциональная схема прибора
В соответствии с рисунком 2 дана функциональная схема прибора, на которой указаны: исследуемый объект ИО; первичный преобразователь П1; устройство сравнения УС; устройство обработки сигналов Об. 1, в котором производится селекция, усиление, коррекция погрешностей, фильтрация и др.; кодирующее устройство Код; модулятор М; канал передачи КП; устройство детектирования Д; устройство декодирования ДК; устройство обработки информации Oбр. 2, обеспечивающее функциональное преобразование, коррекции погрешностей, формирование функции преобразования (1) и др.; преобразователь Пр, выдающий информацию на систему отображения СОИ и на обратный преобразователь 0П, с которого поступают сигналы на устройство сравнения. Эта схема является обобщенной и включает ряд элементов, которые в более простых приборах могут отсутствовать.
2 Емкостные преобразователи
2.1 Принцип работы емкостного измерителя
Принцип работы емкостных измерительных преобразователей заключается в изменении электрической емкости под действием измеряемой физической величины. Существуют различные принципиальные способы, по которым строятся емкостные измерительные преобразователи. В соответствии с рисунком 3 показано изменение электрической емкости путем изменения расстояния между пластинами конденсатора, а В соответствии с рисунком 3б приведена статическая характеристика такого преобразования. Эта характеристика представляет собой обратно пропорциональную (гиперболическую) зависимость.
В соответствии с рисунком 3 дифференциальное изменение электрической емкости путем введения дополнительной металлической пластины между пластинами конденсатора, имеющей собственный электрический вывод. В соответствии с рисунком 3г приведена статическая характеристика такого преобразования, т.е. зависимости для Q и С2, где Q и С2 — соответственно электрические емкости конденсаторов, лежащих выше и ниже средней металлической пластины. Наибольшая чувствительность емкостного преобразователя имеет место, когда его пластины максимально близки друг к другу. Однако принято считать, что расстояние между ними не может быть менее чем 100 мкм, поскольку в реальности пластины могут быть непараллельными и не плоскими и обладать излишней шероховатостью. Поэтому существует опасность их соприкосновения. В результате оказывается предпочтительным иметь большие по площади пластины даже с большим зазором между ними. Для измерений смещений менее 1 мм применяются емкостные преобразователи с изменяющимся расстоянием между пластинами. Для измерения смещений, превышающих 1 мм, чаще всего используются преобразователи с изменяющейся площадью перекрытия пластин. В современных емкостных преобразователях обеспечивается возможность измерения перемещений порядка долей микрона. Роль одной из пластин конденсатора может выполнять само изделие, перемещение которого подлежит измерению. Емкостные преобразователи применяются главным образом в стационарных условиях для проведения стендовых исследований и для прецизионных измерений физических величин.
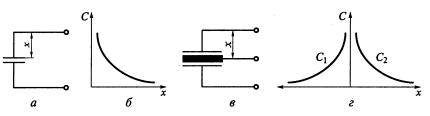
а — схема емкостного чувствительного элемента; б — его статическая характеристика с изменением расстояния между обкладками; в — схема дифференциального емкостного чувствительного элемента; г — его статическая характеристика с изменением расстояния между обкладками
Рисунок 3 – Принцип работы и статические характеристики емкостных чувствительных элементов
Эти датчики чувствительны к температурным колебаниями и изменению влажности. Они могут давать ошибочный или искаженный сигнал, если соединительные провода имеют большую длину и собственные емкость и индуктивность. Калибровка таких датчиков должна производиться вместе с кабелем. Для подключения емкостных датчиков особенно важно использовать бифилярную обмотку, которая в общем случае представляет собой витки из уложенных рядом, но обеспечивающих противоположное направление протекания тока проводников. Такая обмотка обеспечивает не только электрический контакт, но и взаимное уничтожение полей, создаваемых противоположно протекающими токами: эти поля ведут к созданию реактивного сопротивления соединительных кабелей. Таким образом, можно считать, что бифилярная обмотка обладает чисто активным омическим сопротивлением. Емкостные датчики также используются и для измерения влажности.
2.3 Разновидности датчиков
2.3.1 Классификации
Все измерители на основе ёмкостного сенсора можно разделить на:
-
одноемкостные; -
двухемкостные.
Необходимо отметить, что конструктивно емкостные датчики могут быть:
-
плоскими; -
цилиндрическими; -
поворотными.
Сфера применения любых из них достаточно обширна. Как пример, по функциональному назначению их можно использовать в роли:
-
измерителей уровня; -
приборов контроля углового перемещения; -
датчиков перемещения; -
инклинометров; -
датчиков давления.
Этими примерами далеко не исчерпываются варианты применения емкостных измерителей. Ниже будут рассмотрены и другие возможности, предоставляемые этими приборами.
2.3.1 Одноемкостные датчики
Это самые простые сенсоры. По сути, они являются обычными конденсаторами переменной емкости, изменения которой отслеживаются специальной схемой. Ёмкостные измерители подобного типа подвержены сильному влиянию со стороны внешней среды. Лучше всего на их основе реализовывать различные бесконтактные варианты контроля, например, приближения посторонних лиц к охраняемой зоне или движения в ней.
Одноемкостные датчики выглядят в соответствии с рисунком 4.
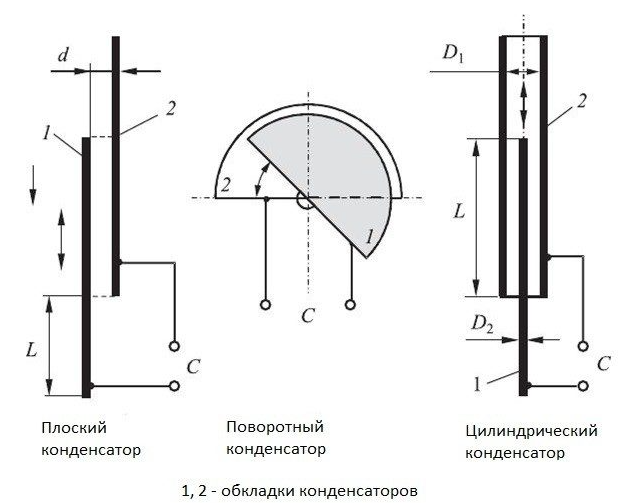
Рисунок 4 – Одноемкостные датчики
2.3.2 Двухемкостные датчики
Позволяют уменьшить влияние внешней среды. Ёмкостный сенсор подобного типа отличается большей точностью измерения из-за того, что один конденсатор служит в качестве эталонного. Это позволяет компенсировать стороннее влияние. Двухемкостные датчики бывают дифференциальными и полудифференциальными.
Одноемкостные датчики выглядят в соответствии с рисунком 5.
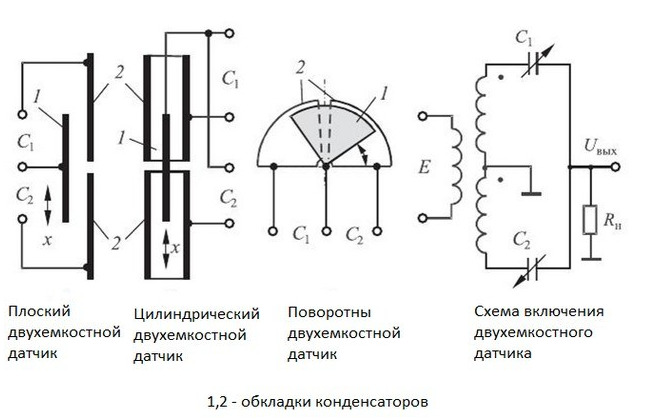
Рисунок 5 – Двуемкостные датчики
2.3.3 Датчики уровня
Емкостные датчики уровня — устройства, позволяющие контролировать уровень жидкого или сыпучего вещества в баке или бункере. Конечно, конструктивное исполнение вариантов измерителей для различных веществ будет разным, но принцип останется неизменным.
Фактически емкостные датчики уровня подобного типа являются двумя конденсаторами, соединенными между собой параллельно.