Добавлен: 25.10.2023
Просмотров: 231
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Только у одного диэлектриком служит воздух, а у другого — жидкость или иное вещество. Таким образом, емкость каждого из них будет разная, она будет меняться и зависеть от степени заполнения бункера (бака).
Емкостные датчики уровня выглядят в соответствии с рисунком 6.
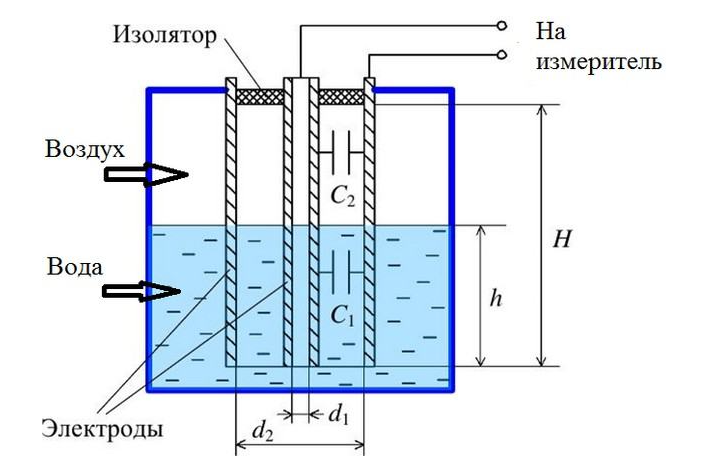
Рисунок 6 – Емкостные датчики уровня
В подобном измерителе давление вызывает изменение расстояния между обкладками конденсатора. Достигается это тем, что между его пластинами располагается эластичная мембрана, на которую и оказывается воздействие. Перегородка в зависимости от давления движется в ту или иную сторону, что приводит к изменению емкости.
Емкостные датчики уровня выглядят в соответствии с рисунком 7.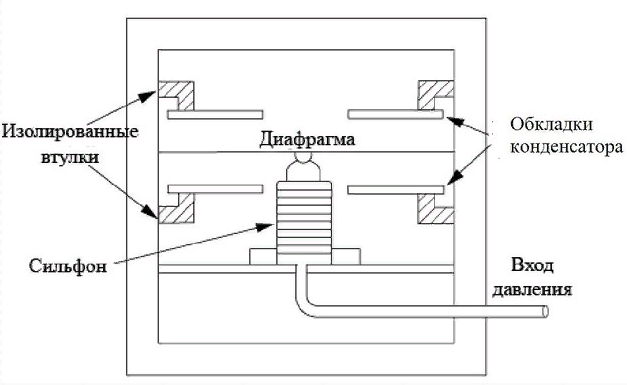
Рисунок 7 – Емкостные датчики давления
Рассматривая разнообразные типы сенсоров на основе электрической емкости, нельзя обойти вниманием такое их использования как датчики прикосновения. Самым наглядным примером подобных приборов служат смартфоны. Реализация датчиков прикосновения может быть достаточно сложной.
Конденсатор существует не только в виде отдельного объемного элемента с выводами. Емкостью также обладают два обычных проводника, расположенные параллельно. Исходя из этого, можно получить конденсатор, основываясь на электропроводных слоях, разделенных каким-либо диэлектриком. Такой конденсатор может быть получен на основе печатной платы.
В соответствии с рисунком 8 в двух проекциях — сверху и сбоку, представлена схема емкостного датчика прикосновения. Мы видим обособленный участок (сенсорная кнопка), отделенный от общего слоя меди. А так как остальные участки соединены с землей, то сенсорная площадка может быть представлена как конденсатор между ней и землей.
Емкость такого конденсатора будет мала, порядка 10 пФ. Но для различных устройств ее значение не принципиально. При контроле зачастую важна не емкость, а ее изменение. Именно на это рассчитаны те схемы, которые обрабатывают состояние сенсорной кнопки.
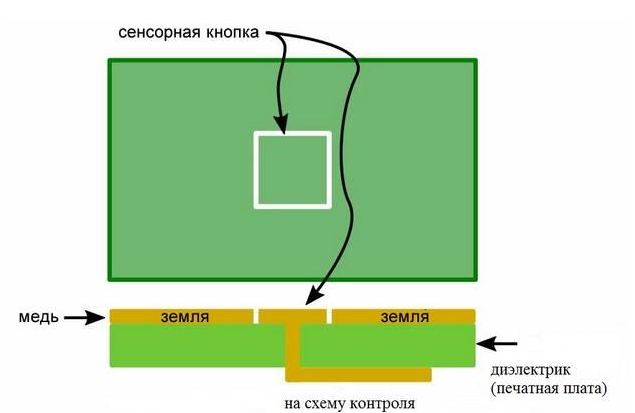
Рисунок 8 – Схема емкостного датчика прикосновения
Подобные сенсоры нашли широкое применение не так давно, хотя в повседневной жизни они встречаются повсеместно. Можно ожидать что, благодаря им использование механических переключателей и кнопок будет минимизировано. Самое главное — такая технология позволяет определить момент касания, а уж современная электроника его обработает без каких-либо проблем.
Конструктивные схемы емкостных преобразователей выполняются различных вариантах в зависимости от области применения (в соответствии с рисунком 9). При измерении уровней жидких и сыпучих тел находят применение цилиндрические или плоские конденсаторы (в соответствии с рисунком 9а), емкость которых характеризуется уровнем х и зависит от диэлектрических проницаемостей жидкости , изоляции
, изоляции  и воздуха
и воздуха  .
.
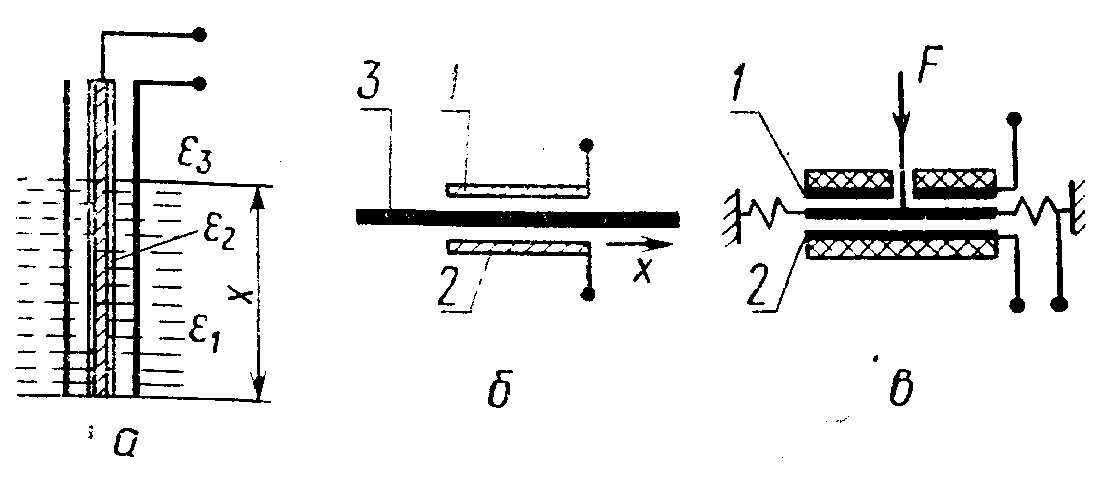

Рис. 11 Схемы устройства емкостных преобразователей
Для измерения толщины х ленты 3 из диэлектрика с (в соответствии с рисунком 9б) ее протягивают между электродами 1 и 2, расстояние межу которыми
(в соответствии с рисунком 9б) ее протягивают между электродами 1 и 2, расстояние межу которыми  . Для измерения малых перемещений (до единиц микрометров), а также точного измерения быстроменяющихся сил и давлений применяются дифференциальные емкостные преобразователи с переменным зазором (в соответствии с рисунком 9в). Средний электрод конденсатора укреплен на упругом элементе (мембране, упругой пластинке, растяжках) между неподвижными электродами 1 и 2.
. Для измерения малых перемещений (до единиц микрометров), а также точного измерения быстроменяющихся сил и давлений применяются дифференциальные емкостные преобразователи с переменным зазором (в соответствии с рисунком 9в). Средний электрод конденсатора укреплен на упругом элементе (мембране, упругой пластинке, растяжках) между неподвижными электродами 1 и 2.
Рассматриваемая схема может быть использована в приборах уравновешивания. Для этого усиленный сигнал с конденсатора после фазочувствительного детектирования может быть подан на обкладки 1 и 2, вследствие чего на средний электрод будет действовать электростатическая сила, уравновешивающая измеряемую силу. В соответствии с рисунком 9г и 9д показаны схемы устройства емкостных преобразователей с переменной площадью. В соответствии с рисунком 9г диэлектрик 1 перемещается по стрелке, а в соответствии с рисунком 9д один из электродов 2 жестко связан с валом и совершает угловые перемещения относительно неподвижного электрода 1.
Применимость того или иного датчика в этих сферах определяется прежде всего отношением цена/эффективность. При промышленном применении определяющим фактором является погрешность, которая при регулировании процессов должна составлять 1...2%, а для задач контроля - 2...3%. В этих случаях цены датчиков превышают 100 немецких марок ФРГ. Для специальных применений в области робототехники и медицинской техники цены датчиков могут достигать даже уровня 10...100 тыс. немецких марок ФРГ. Благодаря внедрению новых технологий изготовления (высоковакуумное напыление, распыление, химическое осаждение из газовой фазы, фотолитография и т. д.) и новых материалов непрерывно расширяются сферы применения датчиков, недоступные ранее из-за их высокой цены.
Использование емкостных преобразователей позволяет решить самые различные задачи. В качестве примеров можно перечислить такие варианты их использования: указание положения жидкости, сыпучих веществ, в том числе продуктов, в трубе или хранилище, контроль их заполнения; сигнализация обрыва провода, ленты, иных подобных предметов при намотке; подсчет количества штучных изделий.
До недавнего времени конструкторы относились с предубеждением к емкостным датчикам, полагая, что схемы с емкостными датчиками не обеспечивают ни достаточной точности, ни стабильности работы приборов.
Проведенные в настоящее время работы показали, что причина нестабильности работы систем с емкостными датчиками лежит в неправильном подходе конструкторов к проектированию датчиков, в частности, в неправильном расположении изолирующих элементов конструкции, нестабильность свойств которых и приводит к ошибкам в работе систем. Эти трудности оказались преодолимыми, и уже созданы приборы с емкостными датчиками, обеспечивающие высокие точности и стабильность работы, выдерживающие тяжелые режимы эксплуатации.
В настоящее время установлено, что емкостные датчики обладают целым рядом преимуществ по сравнению с другими датчиками. К их достоинствам относятся: потребность весьма малых усилий для перемещения подвижной части (ротора) емкостного датчика; малое потребление энергии; простота изготовления; использование дешевых материалов; отсутствие контактов (в некоторых отдельных случаях - один токосъем с помощью кольца и щетки); высокая точность и стабильность работы систем, с емкостными датчиками; возможность широкой регулировки приборов с некоторыми типами емкостных датчиков.
К недостаткам емкостных датчиков следует отнести высокое внутреннее сопротивление, достигающее десятков и даже сотен мегом, высокие требования к сопротивлению крепежных изолирующих деталей и необходимость работы на повышенной (по сравнению с 50 гц) частоте. Однако в большинстве случаев крепления емкостных датчиков могут быть выполнены и из обычных материалов, а практика показывает, что емкостные датчики дают хорошие результаты на широко распространенной частоте 400 гц.
1. Шандров Б. В. Технические средства автоматизации: Учебник для вузов/ Б. В. Шандров, А. Д. Чудаков: Академия. — Москва, 2007. — 363 с;
2. Ацюховсхий В. А. Ёмкостные диффференциальные датчики перемещения Учебник для вузов/ В. А. Ацюховсхий; под редакцией Д. В. Сверчаника : Москва. — Ленинград, 1960. — 103 с;
3. Кучеров В.Г. Основы научных исследований: Учебник для вузов/ В. Г. Кучеров. О. II. Тужиков, О. О. Тужиков, Г. В. Ханов; под редакцией В. Г. Кучерова : ВолгГТУ. — Волгоград, 2004. — 304 с;
4. Емкостные датчики и принципы их работы // shamrin.ru — https://shamrin.ru/kondensator-v-datchike-dvizheniya/.
Емкостные датчики уровня выглядят в соответствии с рисунком 6.
Рисунок 6 – Емкостные датчики уровня
2.3.4 Емкостные датчики давления
В подобном измерителе давление вызывает изменение расстояния между обкладками конденсатора. Достигается это тем, что между его пластинами располагается эластичная мембрана, на которую и оказывается воздействие. Перегородка в зависимости от давления движется в ту или иную сторону, что приводит к изменению емкости.
Емкостные датчики уровня выглядят в соответствии с рисунком 7.
Рисунок 7 – Емкостные датчики давления
2.3.5 Емкостные датчики прикосновения
Рассматривая разнообразные типы сенсоров на основе электрической емкости, нельзя обойти вниманием такое их использования как датчики прикосновения. Самым наглядным примером подобных приборов служат смартфоны. Реализация датчиков прикосновения может быть достаточно сложной.
Конденсатор существует не только в виде отдельного объемного элемента с выводами. Емкостью также обладают два обычных проводника, расположенные параллельно. Исходя из этого, можно получить конденсатор, основываясь на электропроводных слоях, разделенных каким-либо диэлектриком. Такой конденсатор может быть получен на основе печатной платы.
В соответствии с рисунком 8 в двух проекциях — сверху и сбоку, представлена схема емкостного датчика прикосновения. Мы видим обособленный участок (сенсорная кнопка), отделенный от общего слоя меди. А так как остальные участки соединены с землей, то сенсорная площадка может быть представлена как конденсатор между ней и землей.
Емкость такого конденсатора будет мала, порядка 10 пФ. Но для различных устройств ее значение не принципиально. При контроле зачастую важна не емкость, а ее изменение. Именно на это рассчитаны те схемы, которые обрабатывают состояние сенсорной кнопки.
Рисунок 8 – Схема емкостного датчика прикосновения
Подобные сенсоры нашли широкое применение не так давно, хотя в повседневной жизни они встречаются повсеместно. Можно ожидать что, благодаря им использование механических переключателей и кнопок будет минимизировано. Самое главное — такая технология позволяет определить момент касания, а уж современная электроника его обработает без каких-либо проблем.
3 Возможные сферы применения датчиков
Конструктивные схемы емкостных преобразователей выполняются различных вариантах в зависимости от области применения (в соответствии с рисунком 9). При измерении уровней жидких и сыпучих тел находят применение цилиндрические или плоские конденсаторы (в соответствии с рисунком 9а), емкость которых характеризуется уровнем х и зависит от диэлектрических проницаемостей жидкости
, изоляции и воздуха . Рис. 11 Схемы устройства емкостных преобразователей
Для измерения толщины х ленты 3 из диэлектрика с
(в соответствии с рисунком 9б) ее протягивают между электродами 1 и 2, расстояние межу которыми . Для измерения малых перемещений (до единиц микрометров), а также точного измерения быстроменяющихся сил и давлений применяются дифференциальные емкостные преобразователи с переменным зазором (в соответствии с рисунком 9в). Средний электрод конденсатора укреплен на упругом элементе (мембране, упругой пластинке, растяжках) между неподвижными электродами 1 и 2. Рассматриваемая схема может быть использована в приборах уравновешивания. Для этого усиленный сигнал с конденсатора после фазочувствительного детектирования может быть подан на обкладки 1 и 2, вследствие чего на средний электрод будет действовать электростатическая сила, уравновешивающая измеряемую силу. В соответствии с рисунком 9г и 9д показаны схемы устройства емкостных преобразователей с переменной площадью. В соответствии с рисунком 9г диэлектрик 1 перемещается по стрелке, а в соответствии с рисунком 9д один из электродов 2 жестко связан с валом и совершает угловые перемещения относительно неподвижного электрода 1.
Применимость того или иного датчика в этих сферах определяется прежде всего отношением цена/эффективность. При промышленном применении определяющим фактором является погрешность, которая при регулировании процессов должна составлять 1...2%, а для задач контроля - 2...3%. В этих случаях цены датчиков превышают 100 немецких марок ФРГ. Для специальных применений в области робототехники и медицинской техники цены датчиков могут достигать даже уровня 10...100 тыс. немецких марок ФРГ. Благодаря внедрению новых технологий изготовления (высоковакуумное напыление, распыление, химическое осаждение из газовой фазы, фотолитография и т. д.) и новых материалов непрерывно расширяются сферы применения датчиков, недоступные ранее из-за их высокой цены.
Использование емкостных преобразователей позволяет решить самые различные задачи. В качестве примеров можно перечислить такие варианты их использования: указание положения жидкости, сыпучих веществ, в том числе продуктов, в трубе или хранилище, контроль их заполнения; сигнализация обрыва провода, ленты, иных подобных предметов при намотке; подсчет количества штучных изделий.
Заключение
До недавнего времени конструкторы относились с предубеждением к емкостным датчикам, полагая, что схемы с емкостными датчиками не обеспечивают ни достаточной точности, ни стабильности работы приборов.
Проведенные в настоящее время работы показали, что причина нестабильности работы систем с емкостными датчиками лежит в неправильном подходе конструкторов к проектированию датчиков, в частности, в неправильном расположении изолирующих элементов конструкции, нестабильность свойств которых и приводит к ошибкам в работе систем. Эти трудности оказались преодолимыми, и уже созданы приборы с емкостными датчиками, обеспечивающие высокие точности и стабильность работы, выдерживающие тяжелые режимы эксплуатации.
В настоящее время установлено, что емкостные датчики обладают целым рядом преимуществ по сравнению с другими датчиками. К их достоинствам относятся: потребность весьма малых усилий для перемещения подвижной части (ротора) емкостного датчика; малое потребление энергии; простота изготовления; использование дешевых материалов; отсутствие контактов (в некоторых отдельных случаях - один токосъем с помощью кольца и щетки); высокая точность и стабильность работы систем, с емкостными датчиками; возможность широкой регулировки приборов с некоторыми типами емкостных датчиков.
К недостаткам емкостных датчиков следует отнести высокое внутреннее сопротивление, достигающее десятков и даже сотен мегом, высокие требования к сопротивлению крепежных изолирующих деталей и необходимость работы на повышенной (по сравнению с 50 гц) частоте. Однако в большинстве случаев крепления емкостных датчиков могут быть выполнены и из обычных материалов, а практика показывает, что емкостные датчики дают хорошие результаты на широко распространенной частоте 400 гц.
Список использованных источников
1. Шандров Б. В. Технические средства автоматизации: Учебник для вузов/ Б. В. Шандров, А. Д. Чудаков: Академия. — Москва, 2007. — 363 с;
2. Ацюховсхий В. А. Ёмкостные диффференциальные датчики перемещения Учебник для вузов/ В. А. Ацюховсхий; под редакцией Д. В. Сверчаника : Москва. — Ленинград, 1960. — 103 с;
3. Кучеров В.Г. Основы научных исследований: Учебник для вузов/ В. Г. Кучеров. О. II. Тужиков, О. О. Тужиков, Г. В. Ханов; под редакцией В. Г. Кучерова : ВолгГТУ. — Волгоград, 2004. — 304 с;
4. Емкостные датчики и принципы их работы // shamrin.ru — https://shamrin.ru/kondensator-v-datchike-dvizheniya/.