Файл: Выбор преобразователя частоты и настройка системы управления электропривода.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 43
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Институт открытого и дистанционного образования
Кафедра «Техника, технологии и строительство»
«Выбор преобразователя частоты и настройка системы управления электропривода»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОЙ РАБОТЕ
по дисциплине «Системы управления электроприводов»
вариант 19
ЮУрГУ – ПЗ КР
Руководитель, доцент ______К.М. Виноградов
«____» ___________2023 г.
Автор работы Дайкер П.А.
Студент группы «ДО-514» ___________2023 г.
Работа защищена с оценкой _______________
«___» ___________2023 г.
Челябинск
2023
СОДЕРЖАНИЕ
Исходные данные 3
1 Выбор преобразователя 4
2 Подключение силовых цепей и цепей управления преобразователя 6
3 Режимы работы преобразователя 10
4 Программирование и управление преобразователем 15
5 Параметры и меню 18
6 Порядок настройки системы 20
7 Выбор дополнительного оборудования 23
8 Обслуживание электропривода 26
Заключение 27
Литература 28
Исходные данные
В таблице 1 приведены основные каталожные данные кранового двигателя переменного тока серии МТКН-011-4.
Таблица 1 – Основные каталожные данные двигателя
| Tип ЭД | РН, кВт | nH, об/мин | Ток, А | cosφ | КПД % |
| 4АМТК280 | 90 | 1400 | 163.4 | 0.89 | 94 |
Угловая скорость определяется по формуле:

Номинальный момент двигателя:
1 Выбор преобразователя
Частотный преобразователь Altivar 71 ATV71HD90N4фирмы SchneiderElectric соответствуют самым строгих требованиям применений благодаря использованию различных законов управления электродвигателями и разнообразным функциональным возможностям. Преобразователи используются в подъемно-транспортном оборудовании, текстильных и деревообрабатывающих машинах, лифтах, технологическом оборудовании. Преобразователи частоты Altivar 71 предназначены для электродвигателей мощностью 0,37–630 кВт и напряжением питания 200–690 В.

Рис.1 Вид общий преобразователя частоты серии ATV71
Расшифровка условного обозначения частотного преобразователяATV71HD90N4:
ATV71 — серия частотных преобразователей (Altivar 71);
H — наличие охлаждающего радиатора;
D90 — мощность частотного преобразователя, кВт;
N4 — напряжение на входе частотного преобразователя, В.
Мощность частотного преобразователя — 90 кВт, напряжение питания — трехфазное, 380 В.
В частотном преобразователе реализован алгоритм векторного управления потоком по скорости с датчиком обратной связи или без него. Преобразователем поддерживаются протоколы CANopen и Modbus, что позволяет повысить производительность системы управления. Снижая энергопотребление до оптимального уровня и увеличивая комфортность, Altivar 71 тем самым уменьшает эксплуатационные расходы. Преобразователь частоты имеет увеличенные пределы частоты на выходе для высокоскоростных электродвигателей. Специально для использования в подъемно-транспортном оборудовании были разработаны такие функции:
- контроль состояния и управления тормозом, адаптированного для приводов подъема, поворота и перемещения;
- повышенная точность работы на низкой скорости;
- улучшенные динамические характеристики с алгоритмами векторного управления потоком;
- функция подъема с увеличенной скоростью;
- возможность параллельного подключения электродвигателей
- обработка сигналов датчика веса;
- регулирование воздействия концевых выключателей завершения хода;
- функция Power Removal для блокирования случайного пуска электродвигателя.
Технические данные преобразователя частоты:
-
номинальная мощность - 90 кВт; -
номинальное напряжение - 380 В; -
выходной ток - 166 А; -
масса - 100 кг; -
входная частота - 47 63 Гц; -
коэффициент мощности - 0,7; -
диапазон частот на выходе - 0 - 650 Гц; -
разрешение - 0,01 Гц; -
работа при перегрузках - 200% в течении Зс.,150% в течении 60 с.; -
защита - перегрузка и недогрузка по напряжению, перегрев инвертора; -
дополнительная защита - против короткого замыкания и неполадок при потере заземления, против работы без нагрузки (открытая цепь); -
регулировки и управление - векторное управление без датчика, управление потокосцеплением FCC, кривая зависимости напряжение/ частота; -
разрешение аналоговой установки частоты - 10 бит; -
стабильность заданной частоты - аналоговая <1%, цифровая < 0.02%; -
время разгона/замедления - 0 - 650 с; -
интерфейс -RS-485; -
КПД инвертора - 97%; -
рабочая температура - 0 +50 °С (MMV), 0 -+40 0 С (MDV); -
степень защиты - IP20; -
допустимая влажность - 95% без конденсации.
На рисунке 2 изображена силовая схема ПЧ.
2 Подключение силовых цепей и цепей управления преобразователя
Рис.2 Схема силовая ПЧ
Выпрямитель или звено постоянного тока - преобразует переменное, в данном случае трехфазное напряжение (Uвх.) в постоянное (Uвыпр.), инвертор - с помощью широтно-импульсной модуляции (ШИМ) преобразует выпрямленное напряжение (Uвыпр.) в импульсное (Uи). ШИМ - это импульсный способ задания аналогового сигнала, где сигнал представляется в виде импульсов. Управляя IGBT транзисторами, их включением и выключением, получим импульсное напряжение положительной и отрицательной полярности. Если изменять их скважность (отношение длительности периода к длительности импульса), то можно изменять площадь импульсов, а значит и среднее значение напряжения на выходе. Таким образом получаем псевдосинусоидальную форму выходного напряжения Uи, фильтр – сглаживает высшие гармоники, используется редко, поскольку частота выходных импульсов ШИМ достигает нескольких кГц, и обмотки двигателя вследствие их высокой индуктивности работают как фильтр.
В результате, на выходе схемы преобразователя частоты формируется переменное напряжение, с изменяемой амплитудой и частотой (Uвых = var, fвых = var).
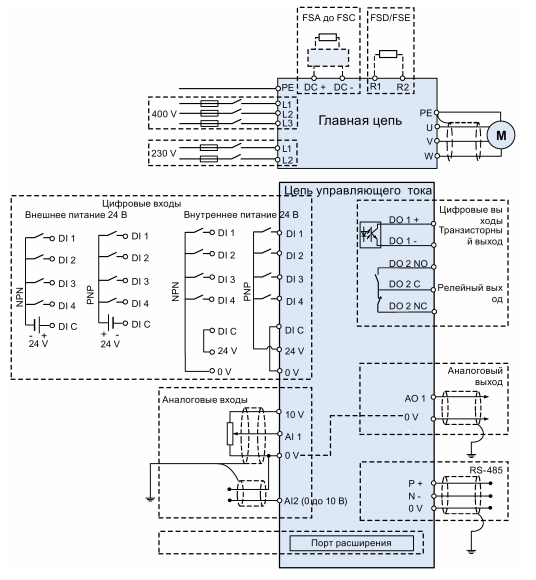
Рис.3 Схема подключения
Для исследования замкнутой по скорости системы используется импульсный датчик скорости (энкодер). Энкодер Е6С2-С является пошаговым и относится к типу энкодеров, которые указывают направление движение и перемещения (исполнительного механизма). Пошаговый энкодер периодически формирует импульсы, соответствующие углу вращения вала.
Этот тип энкодеров не формирует выходные импульсы, когда его вал находится в покое. Пошаговый энкодер связан с счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала. Пошаговый оптический энкодер состоит из пяти компонентов: источника света, пошагового диска, маски, фото детекторной сборки, и сигнального процессора. Диск пошагового энкодера подразделен на точно позиционированные слоты или отметки. Количество слотов или отметок определяет количество импульсов за поворот. К примеру, если диск поделен на 1000 слот, тогда после 250 импульсов вал должен повернуться на 90 градусов.
Технические данные энкодера представлены в таблице 2.1. Внешний вид энкодера изображѐн на рисунке 4.

Рис.4 Энкодер Е6С2-С
Таблица 1
| | Size dia. in mm | Power supply voltage | Output form | Resolution (pulse/rotation) |
| Standard models | 50 | 5 to 24 VDC | NPN open collector output | 10, 20, 30, 40, 50, 60, 100, 200, 300, 360, 400, 500, 600, 720, 800, 1,000, 1,024, 1,200, 1,500, 1,800, 2,000 |
| 12 to 24VDC | PNP open collector output | 100, 200, 360, 500, 600, 1,000, 2,000 | ||
| 5 to 12 VDC | NPN voltage output | 10, 20, 30, 40, 50, 60, 100, 200, 300, 360, 400, 500, 600, 720, 800, 1,000, 1,024, 1,200, 1,500, 1,800, 2,000 | ||
| 5 VDC | Line driver output | 10, 20, 30, 40, 50, 60, 100, 200, 300, 360, 400, 500, 600, 720, 800, 1,000, 1,024, 1,200, 1,500, 1,800, 2,000 | ||
| 8 dia. tough model | 12 to 24VDC | Complimentary output | 100, 200, 300, 360, 500, 600, 720, 800, 1,000, 1,024, 1,200, 1,500, 1,800, 2,000, 2,048, 2,500, 3,600 | |
| 5 to 12 VDC | NPN voltage output | 100, 200, 300, 360, 500, 600, 720, 800, 1,000, 1,024, 1,200, 1,500, 1,800, 2,000, 2,048, 2,500, 3,600 | ||
| 5 to 12 VDC | Line driver output | 100, 200, 300, 360, 500, 600, 720, 800, 1,000, 1,024, 1,200, 1,500, 1,800, 2,000, 2,048, 2,500, 3,600 | ||
3 Режимы работы преобразователя
Как сам преобразователь, так и пользователь, должны реагировать на самые разные ситуации и при необходимости останавливать преобразователь. По этой причине необходимо учитывать не только эксплуатационные требования, но и защитные функции преобразователя (к примеру, от электрической или тепловой перегрузки) и функций защиты персонала и оборудования. Благодаря различным функциям ВЫКЛ (ВЫКЛ1, ВЫКЛ2, ВЫКЛ3) преобразователь может гибко реагировать на названные требования. Помнить, что после вызова команды ВЫКЛ2/ВЫКЛ3 активна блокировка включения преобразователя. Для повторного включения двигателя потребуется сигнал "low → high" команды включения (ON).
Команда ВЫКЛ1 плотно связана с командой ВКЛ. При отмене команды ВКЛ, ВЫКЛ1 активируется напрямую. Преобразователь при ВЫКЛ1 выполняет торможение с временем торможения P1121. При падении выходной частоты ниже значения параметра P2167 или по истечении времени в P2168 импульсы преобразователя блокируются.
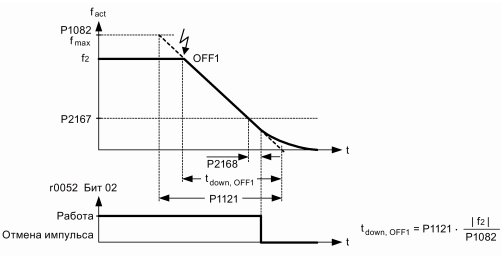
Рис.5
Через команду ВЫКЛ2 импульсы преобразователя могут быть заблокированы немедленно. Это значит, что двигатель выбегает и не может быть остановлен регулируемым способом.
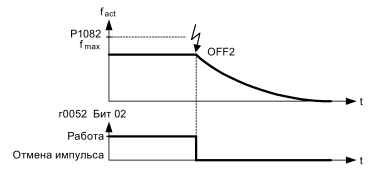
Рис.6
Режим торможения ВЫКЛ3 идентичен таковому ВЫКЛ1, за исключением независимого времени торможения ВЫКЛ3 P1135. При падении выходной частоты ниже значения параметра P2167 и по истечении времени в P2168 импульсы преобразователя запрещаются как при команде ВЫКЛ1.
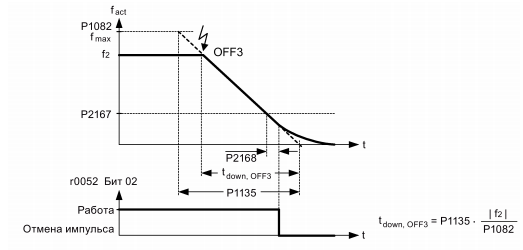
Рис.7
Управлять функцией JOG можно либо через (встроенную) BOP, либо через цифровые входы. Если при управлении через BOP нажимается клавиша RUN, то двигатель запускается и вращается с предварительной установленной частотой JOG (P1058). При отпускании клавиши RUN двигатель останавливается. При использовании цифровых входов как источника команд JOG частота JOG устанавливается через P1058 для JOG вправо и P1059 для JOG влево.
Функция JOG обеспечивает следующее: ● Проверка функциональности двигателя и преобразователя после завершения ввода в эксплуатацию (первое движение перемещения, контроль направления вращения и т.п.) ● Позиционирование двигателя или нагрузки двигателя в определенное положение ● Движение двигателя, к примеру, после прерывания программы.
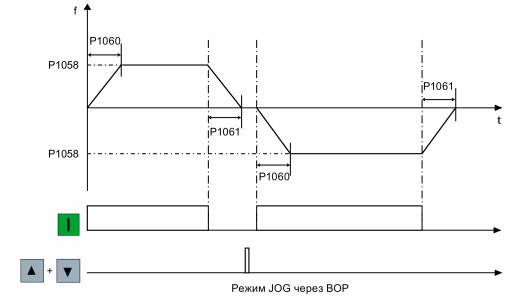
Рис.8
Встроенный ПИД-регулятор (технологический регулятор) поддерживает простые задачи различного вида для контроля процесса, к примеру, контроля давления, уровня или объема подачи. ПИД-регулятор устанавливает заданное значение частоты вращения двигателя так, что регулируемая переменная процесса соответствует своему заданному значению.
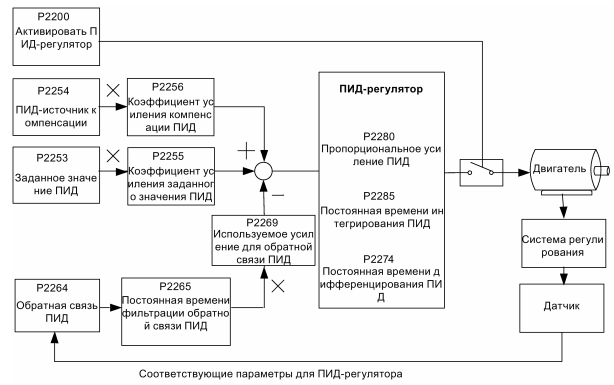
Рис.9
Для торможения двигателя преобразователь может использовать следующие электрические или механические способы торможения: