Добавлен: 25.10.2023
Просмотров: 199
Скачиваний: 7
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Реферат
на тему: «Асинхронные машины специального назначения»
Содержание
1.Введение
2. Индукционный регулятор напряжения……………………..…….…….… 3
3. Фазорегулятор…………………….……………………………………....… 4
4. Сельсины………………………………………………………………...…...5
5. Линейный АД ………………………………………..…………….………. 10
6.Список используемых источников………………………………....…….....12
ВВЕДЕНИЕ
Асинхронные машины специального назначения – этомашины, изготовленные для узкой специальной области применения. АМ специального назначения характеризуются разнообразием рабочих свойств и конструктивного использования.
Индукционный регулятор напряжения
Индукционные регуляторы напряжения представляют собой заторможенный асинхронный двигатель с фазным ротором. Им можно регулировать напряжение в широких пределах. Статорная и роторная обмотки в регуляторе соединены электрически, но так, чтобы они могли быть смещены относительно друг друга поворотом ротора.При подключении индукционного регулятора к сети вращающийся магнитный поток наводит в обмотках статора и ротора ЭДС E1 и E2. При совпадении осей в обмотках ЭДС E1 и E2 совпадают по фазе, а на выходных зажимах регулятора устанавливается максимальное значение напряжения.
При повороте ротора оси обмоток поворачиваются на некоторый угол a. На такой же угол смещается и вектор E2. При этом напряжение на выходе уменьшается. Поворотом ротора на угол 180° мы устанавливаем на выходе минимальное напряжение.
Т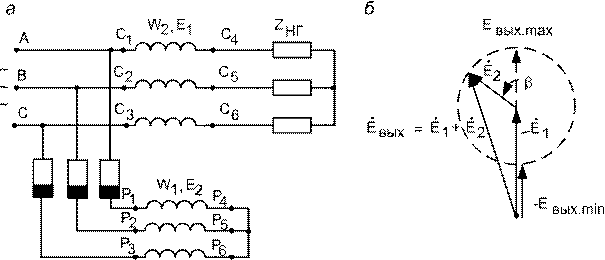 рехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Обмотка регулятора включается по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.
рехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Обмотка регулятора включается по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.
Рис. 12.2. Индукционный регулятор: а – схема соединения обмоток; б – векторная диаграмма напряжений
В качестве первичной обмотки w1 обычно используют обмотку ротора (рис. 12.2); которую включают в трехфазную сеть.
Вторичной обмоткой w2 в этом случае является статорная обмотка, которая включается в сеть последовательно с нагрузкой. Вращающееся магнитное поле индуктирует в обмотках статора и ротора эдс E1 и E2, которые суммируются геометрически и подаются на зажимы нагрузки. При повороте ротора будет изменяться взаимное положение осей одноименных фаз статора и ротора и, следовательно, будет изменяться фаза эдс ротора E2; фаза эдс E1 неизменна, так как E1 = -U1. В соответствии с этим выходное напряжение автотрансформатора будет изменяться плавно от Umax=E1+E2 доUmin=E1-E2 (рис. 12.2,б).
Фазорегулятор
Первичная сторона фазорегулятора присоединяется к сети, а вторичная к сопротивлению нагрузки Zyu, как показано на рис. 12.1.
Угол b – это электрический угол поворота оси фазы обмотки ротора относительно оси фазы обмотки статора.
С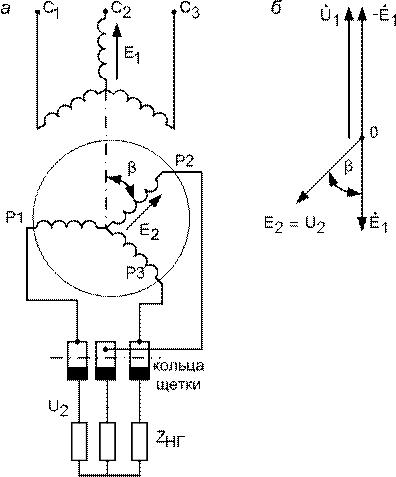 таторная обмотка, включенная в сеть, создает вращающееся магнитное поле, которое индуктирует эдс в обмотках статора и ротора. Эдсстаторной обмотки уравновешивается напряжением сети (-E1
таторная обмотка, включенная в сеть, создает вращающееся магнитное поле, которое индуктирует эдс в обмотках статора и ротора. Эдсстаторной обмотки уравновешивается напряжением сети (-E1
U1), а эдс роторной обмотки подводится к нагрузке.
Фаза эдс роторной обмотки зависит от угла поворота ротора: если оси одноименных фаз статора и ротора совпадают, то эдс E2 совпадет по фазе с эдс E1, так как вращающееся поле пересекает оси одноименных фаз статора и ротора одновременно.
Рис. 12.1. Асинхронная машина в режиме фазорегулятора: а – схема; б – векторная диаграмма напряжений
Если ротор повернуть в направлении вращения магнитного поля на угол b, то максимум потокосцепления и эдс в фазах ротора будет отставать отэдс фаз статора на тот же угол b (рис. 12.1, б). Таким образом, при повороте ротора фаза выходного напряжения (U2
E
Реферат
на тему: «Асинхронные машины специального назначения»
Содержание
1.Введение
2. Индукционный регулятор напряжения……………………..…….…….… 3
3. Фазорегулятор…………………….……………………………………....… 4
4. Сельсины………………………………………………………………...…...5
5. Линейный АД ………………………………………..…………….………. 10
6.Список используемых источников………………………………....…….....12
ВВЕДЕНИЕ
Асинхронные машины специального назначения – этомашины, изготовленные для узкой специальной области применения. АМ специального назначения характеризуются разнообразием рабочих свойств и конструктивного использования.
Индукционный регулятор напряжения
Индукционные регуляторы напряжения представляют собой заторможенный асинхронный двигатель с фазным ротором. Им можно регулировать напряжение в широких пределах. Статорная и роторная обмотки в регуляторе соединены электрически, но так, чтобы они могли быть смещены относительно друг друга поворотом ротора.При подключении индукционного регулятора к сети вращающийся магнитный поток наводит в обмотках статора и ротора ЭДС E1 и E2. При совпадении осей в обмотках ЭДС E1 и E2 совпадают по фазе, а на выходных зажимах регулятора устанавливается максимальное значение напряжения.
При повороте ротора оси обмоток поворачиваются на некоторый угол a. На такой же угол смещается и вектор E2. При этом напряжение на выходе уменьшается. Поворотом ротора на угол 180° мы устанавливаем на выходе минимальное напряжение.
Т
рехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Обмотка регулятора включается по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.Рис. 12.2. Индукционный регулятор: а – схема соединения обмоток; б – векторная диаграмма напряжений
В качестве первичной обмотки w1 обычно используют обмотку ротора (рис. 12.2); которую включают в трехфазную сеть.
Вторичной обмоткой w2 в этом случае является статорная обмотка, которая включается в сеть последовательно с нагрузкой. Вращающееся магнитное поле индуктирует в обмотках статора и ротора эдс E1 и E2, которые суммируются геометрически и подаются на зажимы нагрузки. При повороте ротора будет изменяться взаимное положение осей одноименных фаз статора и ротора и, следовательно, будет изменяться фаза эдс ротора E2; фаза эдс E1 неизменна, так как E1 = -U1. В соответствии с этим выходное напряжение автотрансформатора будет изменяться плавно от Umax=E1+E2 доUmin=E1-E2 (рис. 12.2,б).
Фазорегулятор
Первичная сторона фазорегулятора присоединяется к сети, а вторичная к сопротивлению нагрузки Zyu, как показано на рис. 12.1.
Угол b – это электрический угол поворота оси фазы обмотки ротора относительно оси фазы обмотки статора.
С
таторная обмотка, включенная в сеть, создает вращающееся магнитное поле, которое индуктирует эдс в обмотках статора и ротора. Эдсстаторной обмотки уравновешивается напряжением сети (-E1
2) будет плавно меняться, а действующее значение эдс E2 будет неизменным.
Фазорегулятор представляет собой поворотный трансформатор с регулируемой фазой вторичного напряжения относительно первичного. Фазорегуляторы находят применение главным образом в лабораториях, например, при испытаниях счетчиков электрической энергии, ваттметров.
Сельсины
Сельсином называется информационная электрическая машина переменного тока, вырабатывающая напряжения, амплитуды и фазы которых определяются угловым положением ротора.
Сельсины позволяют осуществить без общего механического вала
согласованное вращение или поворот механизмов.
Известны два режима работы сельсинов: индикаторный и трансформаторный. При работе сельсинов в индикаторном режиме происходит передача на расстояние угла поворота механической системы.
При работе сельсинов в трансформаторном режиме передается сигнал,
воздействующий на исполнительный механизм таким образом, чтобы заставить его отработать заданный поворот.
Рассмотрим устройство и принцип действия однофазных двухполюсных
контактных сельсинов. Однофазная обмотка возбуждения, включенная в сеть переменного тока, расположена на явнополюсном статоре. На роторе размещены три пространственно смещенные относительно друг друга под углом 120o катушки синхронизации. Концы катушек соединены в общий узел, начала катушек выведены на контактные кольца. Обмотка возбуждения создает пульсирующий магнитный поток. Этот поток индуктирует трансформаторные ЭДС в катушках синхронизации. Наибольшая ЭДС индуктируется в катушке, ось которой совпадает с осью пульсирующего потока. При отклонении оси катушки ЭДС уменьшается по синусоидальному закону. Величина и фаза ЭДС в каждой катушке зависит от угла поворота ротора сельсина.
| Р  ис. 13.1 ис. 13.1 | На рис. 13.1 приведена схема соединения однофазных сельсинов при индикаторном режиме работы. В схеме используются сельсин - датчик и сельсин - приемник, представляющие собой два совершенно одинаковых сельсина. ОВд и ОВп - обмотки возбуждения сельсина - датчика и сельсина - приемника. Сд и Сп - катушки синхронизации. |
Если роторы обоих сельсинов ориентированны одинаковым образом
относительно обмоток возбуждения, то в каждой паре катушек индуктируются одинаковые ЭДС. Катушки роторов обоих сельсинов соединены таким образом, что ЭДС в них направлены встречно друг другу, и ток в соединительных проводах отсутствует. Такое положение сельсинов называется согласованным.
Если повернуть ротор сельсина - датчика на угол θ, то в соответствующих катушках роторов наводятся различные по величине ЭДС, и в них возникают токи, которые, взаимодействуя с магнитными полями обмоток возбуждения, создают вращающие моменты. Ротор датчика удерживается в повернутом положении, следовательно, ротор приемника будет поворачиваться до тех пор, пока не исчезнет вращающий момент, т.е. пока не исчезнут токи в катушках сельсина, а это произойдет, когда ротор сельсина - приемника повернется на тот же угол θ, возникнет новое согласованное положение роторов сельсина - датчика и сельсина - приемника. На роторе сельсина - приемника устанавливаются стрелка и шкала, показывающие угол поворота сельсина - датчика.
Если необходимо осуществить дистанционную передачу угла поворота к механизму, требующему б
 ольшого вращающего момента, то используется схема трансформаторного режима работы сельсинов (рис. 13.2).
ольшого вращающего момента, то используется схема трансформаторного режима работы сельсинов (рис. 13.2).Рис. 13.2
Обмотка возбуждения сельсина - датчика подключается к источнику однофазного тока. Катушки синхронизации датчика соединены с катушками синхронизации приемника, который работает как сельсин - трансформатор. Катушки синхронизации СП являются первичной обмоткой, а статорная обмотка ОВП - вторичной (выходной) обмоткой. Она через усилитель у cоединяется с исполнительным двигателем. Исполнительный двигатель через редуктор связан с валом сельсина - приемника.
Обмотка возбуждения датчика образует пульсирующий по горизонтали магнитный поток. В катушках СД индуктируются ЭДС, которые создают токи в роторных катушках датчика и приемника. Каждая катушка синхронизации сельсина - приемника создает свой магнитный поток, а результирующий магнитный поток имеет такое же направление, как и поток в сельсине - датчике.
В обмотке возбуждения сельсина - премника индуктируется ЭДС, величина и фаза которой зависят от угла и направления результирующего потока обмотки синхронизации приемника. Ось обмотки возбуждения приемника сдвинута на 90
o относительно оси обмотки возбуждения датчика, поэтому, когда магнитный поток направлен горизонтально, в обмотке приемника ОВП не возникает никакой ЭДС. Это согласованное положение в трансформаторном режиме.
Если ротор сельсина - датчика повернуть на угол θ, то результирующий магнитный поток в роторе сельсина - приемника повернется тоже на угол θ, а на зажимах обмотки ОВП появится напряжение, зависящее от угла θ. Это напряжение подается на вход усилителя, а затем на исполнительный двигатель. Двигатель вращается, поворачивая обмотки управления. Вал ротора сельсина - приемника через редуктор связан с валом объекта управления. Когда вал объекта управления повернется на нужный угол, одновременно с ним повернется на угол θвал сельсина - приемника. Возникнет новый согласованный режим, и движение прекращается.
Исполнительный механизм и сельсин - датчик не нуждаются в механической связи и могут находиться на большом расстоянии друг от друга.
Электрические системы дистанционной передачи угла поворота или вращения механизмов используются в радиолокаторах, в радиопеленгаторах и другой специальной технике.
Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки.
По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления Uу (рис. 1, а, б, в).
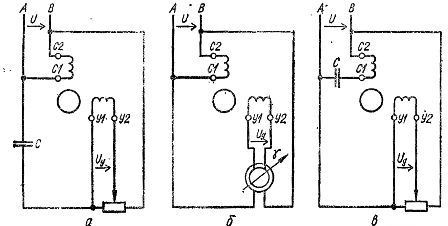
Рис. 1. Схемы включения асинхронных исполнительных двигателей при управлении: а - амплитудном, б - фазовом, в - амплитудно-фазовом.
В результате этого в обеих фазах обмотки статора возникают соответствующие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов или фазорегулятора сдвинуты относительно друг друга во времени, что приводит к возбуждению эллиптического вращающего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
Пуск, регулирование скорости и остановка исполнительных двигателей определяются условиями формирования магнитного поля путем амплитудного, фазового и амплитудно-фазового управления.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают неизменным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз между этими напряжениями, благодари исключенному конденсатору, равен 90° (рис. 1, а).
Фазовое управление харакрно тем, что напряжения U и Uy остаются неизменными, а сдвиг фаз между ними регулируют поворотом ротора фазорегулятора (рис. 1, б).
При амплитудно-фазовом управлении, хотя регулируют только амплитуду напряжения Uy, но при этом, из-за наличия конденсатора в цепи возбуждения и электромагнитного взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз между этим напряжением и напряжением на зажимах обмотки управления (рис. 1, в).
Иногда кроме конденсатора в цепи обмотки возбуждения предусматривают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, снижает потери энергии и улучшает, механические характеристики асинхронного исполнительного двигателя.
При амплитудном управлении круговое вращающееся магнитное поле наблюдается при номинальном сигнале независимо от скорости ротора