Добавлен: 25.10.2023
Просмотров: 200
Скачиваний: 7
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
, а при уменьшении его оно становится эллиптическим. В случае фазового управления круговое вращающееся магнитное поле возбуждается только при номинальном сигнале и сдвиге фаз между напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим. При амплитудно-фазовом управлении круговое вращающееся магнитное поле существует только при одном режиме — при номинальном сигнале в момент пуска двигателя, а затем по мере разгона ротора оно переходит в эллиптическое.
При всех способах управления скорость ротора регулируют изменением характера вращающегося магнитного поля, а перемену направления вращения ротора осуществляют изменением фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
Самоход асинхронных исполнительных двигателей проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обусловлен либо недостаточно большим активным сопротивлением обмотки ротора — методический самоход, либо некачественным исполнением самого двигателя — технологический самоход.
Первый устраним при проектировании двигателей, предусматривающем изготовление ротора с повышенным сопротивлением обмотки и критическим скольжением sкр = 2 - 4, что, кроме того, обеспечивает широкий устойчивый диапазон регулирования скорости ротора, а второй — качественным изготовлением магнитопроводов и обмоток машин при тщательной их сборке.
Так как асинхронные исполнительные двигатели с ротором, имеющим короткозамкнутую обмотку с повышенным активным сопротивлением, отличаются небольшим быстродействием, характеризуемым электромеханической постоянной времени — временем набора ротором скорости от нулевой до половины синхронной — Тм = 0,2 - 1,5 с, то в установках автоматического управления предпочтение отдают исполнительным двигателям с полым немагнитным ротором, у которых электромеханическая постоянная времени имеет меньшее значение — Тм = 0,01 - 0,15 с.
Асинхронные исполнительные двигатели с полым немагнитным ротором, отличающиеся высоким быстродействием, имеют как внешний статор с магнитопроводом обычной конструкции и двухфазной обмоткой с фазами, выполняющими роль обмоток возбуждения и управления, так и внутренний статор в виде
шихтованного ферромагнитного полого цилиндра, укрепленного на подшипниковом щите двигателя.
Поверхности статоров разделены воздушным зазором, который в радиальном направлении имеет размер 0,4 - 1,5 мм. В воздушном зазоре находится стакан из алюминиевого сплава со стенкой толщиной 0,2 - 1 мм, укрепленный на валу двигателя. Ток холостого хода асинхронных двигателей с полым немагнитным ротором велик и доходит до 0,9Iном, а номинальный кпд = 0,2 - 0,4.
В установках автоматики и телемеханики применяют двигатели с полым ферромагнитным ротором, у которого толщина стенки 0.5 - 3 мм. В этих машинах, используемых в качестве исполнительных и вспомогательных двигателей, внутренний статор отсутствует, а ротор укреплен на одной запрессованной или двух торцовых металлических пробках.
Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 - 0,3 мм.
Механические характеристики двигателей с полым ферромагнитным ротором ближе к линейным, чем характеристики двигателей с ротором, имеющим обычную короткозамкнутую обмотку, а также с ротором, выполненным в виде полого немагнитного цилиндра.
Иногда внешнюю поверхность полого ферромагнитного ротора покрывают слоем меди толщиной 0,05 - 0,10 мм, а его торцовые поверхности — слоем меди до 1 мм для увеличения номинальных мощности и момента двигателя, однако кпд его при этом несколько уменьшается.
Существенными недостатками двигателей с полым ферромагнитным ротором является одностороннее прилипание ротора к магнитопроводу статора из-за неравномерности воздушного зазора, чего не бывает в машинах с полым немагнитным ротором. Самоход у двигателей с полым ферромагнитным ротором отсутствует, они устойчиво работают в диапазоне скоростей от нулевой до синхронной скорости ротора.
Асинхронные исполнительные двигатели с массивным ферромагнитным ротором выполненным в виде стального или чугуного цилиндра без обмотки, отличаю простотой конструкции, высокой прочностью, большим пусковым моментом, устойчивостью работы на заданной скорости и могут быть использованы при очень высоких скоростях ротора.
Существуют обращенные двигатели с массивным ферромагнитным ротором, который выполнен в вид наружной вращающейся части.
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ
В линейном асинхронном двигателе (рис. 4.67) зубчатый статор 1 развернут в плоскость и в пазах его помещена трехфазная обмотка 2. Подвижная часть линейного двигателя может иметь конструкцию, подобную ротору обычной асинхронной машины, но также развернутому в плоскость. Она может иметь сердечник 4 из листовой электротехнической стали и обмотку 3 типа «беличья клетка», расположенную в пазах этого сердечника или быть выполненной в виде плоской покосы из ферромагнитного или немагнитного проводящего материала. Линейный асинхронный двигатель можно также выполнить в виде двух статоров, обращенных друг к другу, между которыми перемещается проводящее тело. Для высокоскоростного пассажирского транспорта применяют линейные двигатели, в которых статор 1 (рис. 4.68) размещен на движущемся экипаже, а проводящее тело в виде шины 2 установлено на железнодорожном пути.
Принцип действия линейного двигателя подобен принципу действия асинхронного двигателя нормального исполнения. Трехфазная обмотка статора создает бегущее магнитное поле, которое индуцирует в короткозамкнутой обмотке подвижной части (бегуна) ЭДС. В результате взаимодействия тока в обмотке бегуна и магнитного поля возникают электромагнитные силы, приводящие бегун в движение.
Скольжение в линейном асинхронном двигателе s = (V1 — V2 )/V1 , где V1 = 2πf1 - линейная скорость бегущего поля; V2 - линейная скорость перемещения подвижной части; τ — полюсное деление. При номинальном режиме скольжение имеет примерно такие же значения, как и в асинхронных двигателях нормального исполнения, т. е. скорость V2 перемещения подвижной части близка к V1 .
В линейном асинхронном двигателе возникают краевые эффекты, обусловленные тем, что его статор не замкнут в кольцо и имеет конечную длину. В результате этого кроме основного магнитного бегущего поля возникает пульсирующее поле, которое можно представить в виде прямого и обратного бегущих полей. Обратное поле создает паразитные тормозные силы, вызывает неравномерное распределение тока в фазах обмотки статора, искажение
распределения магнитного поля в воздушном зазоре, дополнительные потери мощности в статоре и подвижной части. Поэтому энергетические и тяговые показатели линейных двигателей хуже, чем у асинхронных двигателей нормального исполнения.
Особенно низкие энергетические показатели получаются при большом воздушном зазоре между статором и ротором. Например, в линейном двигателе, предназначенном для транспортных устройств, из-за большого зазора (около 50 мм) резко возрастает ток холостого хода, при этом КПД и коэффициент мощности составляют 0,2—0,3, а энергетический фактор А = η cos φ < 0,1.
В настоящее время линейные асинхронные двигатели используют для привода в движение экипажей высокоскоростного пассажирского транспорта на магнитном подвесе, тележек, подъемных кранов, заслонок и других линейно движущихся объектов. При использовании такого двигателя на высокоскоростном наземном транспорте (рис. 4.69, а) статор 2 с обмоткой 3 устанавливают на движущемся экипаже 1, а ротором служит стальная полоса 5, расположенная на железнодорожном пути 4 между рельсами. Возникающая продольная сила перемещает экипаж по рельсовому пути, а вызванная краевыми эффектами поперечная сила Fп способствует магнитному подвешиванию экипажа. При использовании двигателя в приводе тележки подъемного крана (рис. 4.69,б) статор 2 с обмоткой 3 устанавливают на тележке 6, а ротором служит стальная полоса 4, укрепленная на балке 5, по которой перемещается тележка.
В некоторых случаях линейные двигатели применяют в металлообрабатывающих станках для получения возвратнопоступательного перемещения элементов станка путем периодического изменения чередования фаз обмотки статора двигателя. Однако при этом возникают довольно значительные потери мощности из-за того, что часть кинетической энергии подвижного элемента станка бесполезно теряется в каждом цикле ускорения и замедления. Кроме того, существенно увеличивается общая масса этого элемента за счет сочлененной с ней подвижной части линейного двигателя.
При всех способах управления скорость ротора регулируют изменением характера вращающегося магнитного поля, а перемену направления вращения ротора осуществляют изменением фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
Самоход асинхронных исполнительных двигателей проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обусловлен либо недостаточно большим активным сопротивлением обмотки ротора — методический самоход, либо некачественным исполнением самого двигателя — технологический самоход.
Первый устраним при проектировании двигателей, предусматривающем изготовление ротора с повышенным сопротивлением обмотки и критическим скольжением sкр = 2 - 4, что, кроме того, обеспечивает широкий устойчивый диапазон регулирования скорости ротора, а второй — качественным изготовлением магнитопроводов и обмоток машин при тщательной их сборке.
Так как асинхронные исполнительные двигатели с ротором, имеющим короткозамкнутую обмотку с повышенным активным сопротивлением, отличаются небольшим быстродействием, характеризуемым электромеханической постоянной времени — временем набора ротором скорости от нулевой до половины синхронной — Тм = 0,2 - 1,5 с, то в установках автоматического управления предпочтение отдают исполнительным двигателям с полым немагнитным ротором, у которых электромеханическая постоянная времени имеет меньшее значение — Тм = 0,01 - 0,15 с.
Асинхронные исполнительные двигатели с полым немагнитным ротором, отличающиеся высоким быстродействием, имеют как внешний статор с магнитопроводом обычной конструкции и двухфазной обмоткой с фазами, выполняющими роль обмоток возбуждения и управления, так и внутренний статор в виде
шихтованного ферромагнитного полого цилиндра, укрепленного на подшипниковом щите двигателя.
Поверхности статоров разделены воздушным зазором, который в радиальном направлении имеет размер 0,4 - 1,5 мм. В воздушном зазоре находится стакан из алюминиевого сплава со стенкой толщиной 0,2 - 1 мм, укрепленный на валу двигателя. Ток холостого хода асинхронных двигателей с полым немагнитным ротором велик и доходит до 0,9Iном, а номинальный кпд = 0,2 - 0,4.
В установках автоматики и телемеханики применяют двигатели с полым ферромагнитным ротором, у которого толщина стенки 0.5 - 3 мм. В этих машинах, используемых в качестве исполнительных и вспомогательных двигателей, внутренний статор отсутствует, а ротор укреплен на одной запрессованной или двух торцовых металлических пробках.
Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 - 0,3 мм.
Механические характеристики двигателей с полым ферромагнитным ротором ближе к линейным, чем характеристики двигателей с ротором, имеющим обычную короткозамкнутую обмотку, а также с ротором, выполненным в виде полого немагнитного цилиндра.
Иногда внешнюю поверхность полого ферромагнитного ротора покрывают слоем меди толщиной 0,05 - 0,10 мм, а его торцовые поверхности — слоем меди до 1 мм для увеличения номинальных мощности и момента двигателя, однако кпд его при этом несколько уменьшается.
Существенными недостатками двигателей с полым ферромагнитным ротором является одностороннее прилипание ротора к магнитопроводу статора из-за неравномерности воздушного зазора, чего не бывает в машинах с полым немагнитным ротором. Самоход у двигателей с полым ферромагнитным ротором отсутствует, они устойчиво работают в диапазоне скоростей от нулевой до синхронной скорости ротора.
Асинхронные исполнительные двигатели с массивным ферромагнитным ротором выполненным в виде стального или чугуного цилиндра без обмотки, отличаю простотой конструкции, высокой прочностью, большим пусковым моментом, устойчивостью работы на заданной скорости и могут быть использованы при очень высоких скоростях ротора.
Существуют обращенные двигатели с массивным ферромагнитным ротором, который выполнен в вид наружной вращающейся части.
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ
В линейном асинхронном двигателе (рис. 4.67) зубчатый статор 1 развернут в плоскость и в пазах его помещена трехфазная обмотка 2. Подвижная часть линейного двигателя может иметь конструкцию, подобную ротору обычной асинхронной машины, но также развернутому в плоскость. Она может иметь сердечник 4 из листовой электротехнической стали и обмотку 3 типа «беличья клетка», расположенную в пазах этого сердечника или быть выполненной в виде плоской покосы из ферромагнитного или немагнитного проводящего материала. Линейный асинхронный двигатель можно также выполнить в виде двух статоров, обращенных друг к другу, между которыми перемещается проводящее тело. Для высокоскоростного пассажирского транспорта применяют линейные двигатели, в которых статор 1 (рис. 4.68) размещен на движущемся экипаже, а проводящее тело в виде шины 2 установлено на железнодорожном пути.
Принцип действия линейного двигателя подобен принципу действия асинхронного двигателя нормального исполнения. Трехфазная обмотка статора создает бегущее магнитное поле, которое индуцирует в короткозамкнутой обмотке подвижной части (бегуна) ЭДС. В результате взаимодействия тока в обмотке бегуна и магнитного поля возникают электромагнитные силы, приводящие бегун в движение.
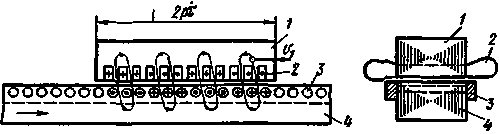 | Рис. 4.67. Схема линейного асинхронного двигателя |
| Рис. 4.68. Общий вид линейного асинхронного двигателя | 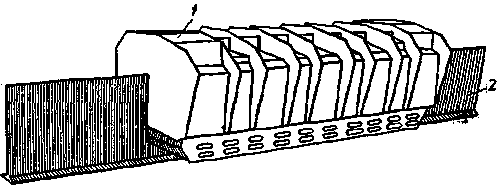 |
Скольжение в линейном асинхронном двигателе s = (V1 — V2 )/V1 , где V1 = 2πf1 - линейная скорость бегущего поля; V2 - линейная скорость перемещения подвижной части; τ — полюсное деление. При номинальном режиме скольжение имеет примерно такие же значения, как и в асинхронных двигателях нормального исполнения, т. е. скорость V2 перемещения подвижной части близка к V1 .
В линейном асинхронном двигателе возникают краевые эффекты, обусловленные тем, что его статор не замкнут в кольцо и имеет конечную длину. В результате этого кроме основного магнитного бегущего поля возникает пульсирующее поле, которое можно представить в виде прямого и обратного бегущих полей. Обратное поле создает паразитные тормозные силы, вызывает неравномерное распределение тока в фазах обмотки статора, искажение
распределения магнитного поля в воздушном зазоре, дополнительные потери мощности в статоре и подвижной части. Поэтому энергетические и тяговые показатели линейных двигателей хуже, чем у асинхронных двигателей нормального исполнения.
Особенно низкие энергетические показатели получаются при большом воздушном зазоре между статором и ротором. Например, в линейном двигателе, предназначенном для транспортных устройств, из-за большого зазора (около 50 мм) резко возрастает ток холостого хода, при этом КПД и коэффициент мощности составляют 0,2—0,3, а энергетический фактор А = η cos φ < 0,1.
В настоящее время линейные асинхронные двигатели используют для привода в движение экипажей высокоскоростного пассажирского транспорта на магнитном подвесе, тележек, подъемных кранов, заслонок и других линейно движущихся объектов. При использовании такого двигателя на высокоскоростном наземном транспорте (рис. 4.69, а) статор 2 с обмоткой 3 устанавливают на движущемся экипаже 1, а ротором служит стальная полоса 5, расположенная на железнодорожном пути 4 между рельсами. Возникающая продольная сила перемещает экипаж по рельсовому пути, а вызванная краевыми эффектами поперечная сила Fп способствует магнитному подвешиванию экипажа. При использовании двигателя в приводе тележки подъемного крана (рис. 4.69,б) статор 2 с обмоткой 3 устанавливают на тележке 6, а ротором служит стальная полоса 4, укрепленная на балке 5, по которой перемещается тележка.
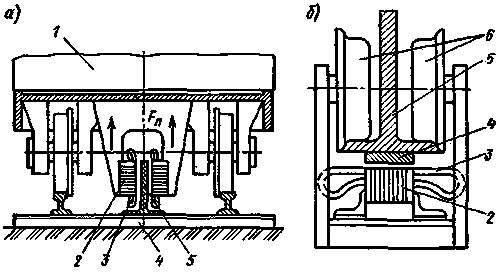 | Рис. 4.69. Схемы установки линейных двигателей на движущемся экипаже и на тележке подъемного крана |
В некоторых случаях линейные двигатели применяют в металлообрабатывающих станках для получения возвратнопоступательного перемещения элементов станка путем периодического изменения чередования фаз обмотки статора двигателя. Однако при этом возникают довольно значительные потери мощности из-за того, что часть кинетической энергии подвижного элемента станка бесполезно теряется в каждом цикле ускорения и замедления. Кроме того, существенно увеличивается общая масса этого элемента за счет сочлененной с ней подвижной части линейного двигателя.