ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 31
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Робототехника — это научная и техническая дисциплина, изучающая создание, разработку и управление роботами. Роботы представляют собой механические или виртуальные устройства, способные выполнять различные задачи с минимальным или без участия человека. Они могут быть программно настроены для выполнения определенных операций, автономно взаимодействовать с окружающей средой, обрабатывать информацию из датчиков и принимать решения на основе полученных данных.
ROS (Robot Operating System) — это гибкая и мощная система управления роботами с открытым исходным кодом, разработанная специально для робототехнических приложений. ROS предоставляет разработчикам набор инструментов, библиотек и протоколов, которые упрощают разработку, интеграцию и управление робототехническими системами. Она позволяет создавать модульные и расширяемые робототехнические системы, а также обеспечивает механизмы взаимодействия между компонентами системы.
ROS была разработана для облегчения процесса разработки программного обеспечения для роботов. Она предоставляет разработчикам унифицированный фреймворк и инструменты, которые позволяют создавать, тестировать и отлаживать программное обеспечение для роботов с использованием стандартных подходов и практик. ROS обладает большим сообществом разработчиков, которые активно вкладывают усилия в его развитие, обмен опытом и предоставление поддержки другим разработчикам.
Основные принципы работы ROS включают:
- Модульность: ROS построен на основе модульной архитектуры, которая позволяет разработчикам создавать независимые компоненты (узлы), выполняющие определенные задачи, и легко комбинировать их в единую систему.
- Коммуникация: ROS предоставляет механизм обмена сообщениями между узлами. Узлы могут публиковать сообщения в топики, а другие узлы могут подписываться на эти топики и получать сообщения, обеспечивая эффективное взаимодействие между компонентами системы.
- Управление ресурсами: ROS предоставляет инструменты для управления ресурсами робота, такими как управление устройствами ввода-вывода, датчиками и актуаторами.
- Инструменты и библиотеки: ROS предоставляет разработчикам богатый набор инструментов и библиотек для разработки, отладки и визуализации робототехнического программного обеспечения.
ROS является широко используемым и популярным инструментом в области робототехники. Она облегчает разработку и интеграцию программного обеспечения для роботов, ускоряет процесс создания и тестирования робототехнических приложений и способствует развитию робототехнической индустрии.
Цель данной курсовой работы состоит в изучении и применении ROS (Robot Operating System) для управления роботом TurtleBro. Главной задачей работы является разработка программного модуля, который будет управлять движением робота TurtleBro с использованием ROS.
Основные понятия и принципы работы ROS включают: узлы (nodes); топики (topics); сервисы (services); пакеты (packages); командная строка (command line tools); библиотеки и инструменты; механизмы коммуникации.
Узел — это базовая вычислительная единица в ROS. Узлы представляют собой отдельные процессы, которые выполняют определенные задачи или функции. Например, узлы могут быть ответственными за управление двигателями робота, считывание данных с датчиков или обработку изображений. Узлы взаимодействуют между собой, обмениваясь сообщениями через топики или сервисы.
Топик — это именованный канал, через который узлы могут обмениваться сообщениями. Узлы могут быть издателями (публикуют сообщения в топик) или подписчиками (получают сообщения из топика). Топики обеспечивают асинхронную коммуникацию между узлами, позволяя им обмениваться данными. Например, узел, отвечающий за управление двигателями робота, может публиковать информацию о скорости движения в топике, а узел, отвечающий за навигацию, может подписаться на этот топик, чтобы получать данные о скорости движения и принимать соответствующие решения.
Сервис — это запрос-ответный механизм коммуникации между узлами. Узел, предоставляющий сервис (сервер), ожидает запрос от других узлов (клиентов) и отвечает на него. Запрос и ответ представлены сообщениями, которые определяются заранее. Сервисы позволяют узлам синхронно взаимодействовать друг с другом и передавать сложные данные или выполнять длительные операции.
Пакет — это основная организационная единица в ROS. Он содержит исполняемые файлы, конфигурационные файлы, библиотеки, зависимости и другие ресурсы, необходимые для разработки и выполнения определенной функциональности. Пакеты позволяют структурировать и организовывать проекты, а также упрощают совместную работу и переиспользование кода.
ROS предоставляет набор командной строки инструментов, которые позволяют разработчикам управлять и мониторить ROS систему. Некоторые из основных командных инструментов ROS включают roscore для запуска мастера ROS, roslaunch для запуска нескольких узлов одновременно, rosrun для запуска отдельного узла, rostopic для работы с топиками и rosservice для работы с сервисами.
ROS предоставляет разработчикам широкий набор библиотек и инструментов, которые упрощают разработку робототехнического программного обеспечения. Некоторые из ключевых библиотек ROS включают roscpp (для разработки на C++), rospy (для разработки на Python) и rviz (инструмент для визуализации данных и моделей робота).
ROS предоставляет несколько механизмов коммуникации между узлами, таких как публикация-подписка (Publish-Subscribe), сервисы (Services) и параметры (Parameters). Эти механизмы обеспечивают эффективный обмен данными и командами между различными компонентами системы.
Изучение и понимание этих основных понятий и принципов работы ROS являются важной частью разработки программного обеспечения для роботов с использованием данной системы. Это позволяет разработчикам эффективно использовать возможности ROS и создавать гибкие и расширяемые робототехнические системы.
Архитектура ROS основана на концепции распределенной системы, которая позволяет различным компонентам робототехнической системы работать в совместной среде и обмениваться данными. Основные элементы архитектуры ROS включают: мастер (Master); топик-публикаторы и топик-подписчики (Publishers and Subscribers); серверы и клиенты сервисов (Service Servers and Clients); параметры (Parameters); распределенный файловый систем (Distributed File System). Далее рассмотрим каждый из элементов поподробнее.
Мастер является центральным элементом архитектуры ROS. Он отвечает за управление и координацию всех узлов в системе. Мастер поддерживает реестр доступных топиков и сервисов, а также обеспечивает связь между узлами. Узлы регистрируются в мастере при запуске и получают информацию о доступных топиках и сервисах от мастера.
Топик-публикаторы (publishers) и топик-подписчики (subscribers) обеспечивают механизм публикации и получения сообщений через топики. Топик-публикаторы отправляют сообщения в определенный топик, а топик-подписчики получают эти сообщения из топика. Топики позволяют узлам обмениваться данными асинхронно и связывают узлы, которые работают над одной и той же информацией.
Серверы сервисов (service servers) предоставляют определенный функционал или услуги, на которые могут делать запросы клиенты сервисов (service clients). Сервер ожидает запрос от клиента, выполняет необходимую операцию и отправляет ответ клиенту. Сервисы предоставляют синхронный механизм взаимодействия между узлами и позволяют передавать сложные данные и выполнить длительные операции.
Параметры представляют собой значения, которые могут быть установлены или получены узлами во время выполнения. Они используются для настройки параметров работы узлов или обмена конфигурационными данными между компонентами системы. Параметры могут быть установлены из командной строки, конфигурационных файлов или изменены во время работы системы.
ROS предоставляет распределенную файловую систему, которая позволяет узлам обмениваться файлами и ресурсами. Распределенный файловый систем позволяет удобно организовывать и совместно использовать пакеты, ресурсы и модели роботов.
Архитектура ROS обеспечивает гибкую и масштабируемую систему для разработки и управления робототехническими проектами. Она позволяет эффективно управлять коммуникацией между компонентами системы, обмениваться данными и создавать сложные распределенные системы управления роботами.
ROS предоставляет обширный набор инструментов и библиотек, которые упрощают разработку, отладку и управление робототехническими системами. Вот некоторые из основных инструментов и библиотек ROS: RViz; RQT; ROSbag; roscpp и rospy; MoveIt!; Gazebo; ROS Navigation Stack. Расскажу о каждом побольше.
RViz — это мощный инструмент для визуализации данных и моделей роботов в ROS. Он позволяет отображать трехмерные модели роботов, данные с датчиков, карты, траектории и другие визуальные элементы. RViz позволяет разработчикам визуально анализировать и отлаживать работу робототехнической системы.
RQT — это набор инструментов для разработки графических пользовательских интерфейсов (GUI) в ROS. RQT включает в себя различные плагины, которые позволяют создавать интерактивные панели управления, отображать данные, настраивать параметры и выполнять другие операции взаимодействия с робототехнической системой.
ROSbag — это инструмент для записи и воспроизведения данных в ROS. Он позволяет сохранять сообщения из топиков в файлы, которые могут быть воспроизведены позже. ROSbag облегчает анализ и тестирование системы, а также позволяет повторно использовать данные для обучения моделей и алгоритмов.
roscpp и rospy — это библиотеки ROS для разработки узлов на C++ и Python соответственно. Они предоставляют набор функций и классов для работы с топиками, сервисами, параметрами и другими элементами ROS. roscpp и rospy облегчают разработку и взаимодействие узлов в ROS системе.
MoveIt! — это библиотека и набор инструментов для планирования движений и управления манипуляторами роботов в ROS. MoveIt! обеспечивает функциональность по планированию путей, обнаружению препятствий, контролю за схватами и другими задачами, связанными с управлением движениями робота.
Gazebo — это симулятор роботов, интегрированный с ROS. Gazebo позволяет создавать виртуальные модели роботов, среды, сенсоров и тестировать алгоритмы управления в симуляционной среде. Gazebo предоставляет удобный способ разрабатывать и отлаживать робототехнические системы без необходимости физического оборудования.
ROS Navigation Stack — это набор пакетов и библиотек для реализации навигации роботов в ROS. Он включает в себя алгоритмы построения карт, локализации, планирования пути и контроля движения. ROS Navigation Stack позволяет роботам автономно перемещаться в сложных средах и выполнять задачи навигации.
Это лишь некоторые из инструментов и библиотек, предоставляемых ROS. Каждый из них имеет свои уникальные возможности и применения, что делает ROS мощным фреймворком для разработки робототехнических приложений.
TurtleBro - это робототехническая платформа, разработанная на основе робота TurtleBot и интегрированная с ROS. Он представляет собой небольшого размера мобильного робота, который способен выполнять различные задачи и перемещаться внутри среды.
TurtleBro имеет колесную платформу, которая обеспечивает его подвижность и мобильность. Он оснащен двумя или более колесами, которые могут вращаться независимо друг от друга, позволяя роботу перемещаться в разных направлениях и поворачиваться на месте. Колесная платформа обеспечивает роботу гладкое и точное перемещение внутри среды.
Также робот оснащен различными аппаратными компонентами, которые обеспечивают его функциональность и возможности.
TurtleBro использует микроконтроллер или вычислительный модуль в качестве основной платформы для управления роботом. Этот модуль выполняет обработку данных, управление двигателями и другие вычислительные задачи. В зависимости от конкретной реализации TurtleBro может использовать платформы, такие как Arduino, Raspberry Pi или специализированные вычислительные модули.
Этот робот имеет колесную платформу, которая обеспечивает его подвижность. Колеса могут быть обычными колесами или механическими платформами с приводами. Они позволяют роботу перемещаться в различных направлениях и маневрировать в пространстве.
TurtleBro обычно оснащен различными датчиками, которые позволяют ему воспринимать окружающую среду. Это могут быть лазерные дальномеры (Lidar), которые используются для измерения расстояния до препятствий и создания карт среды. Камеры могут быть использованы для захвата изображений, обработки видео или выполнения задач компьютерного зрения. Инерциальные измерительные блоки (IMU) позволяют определить ориентацию и перемещение робота в пространстве. Датчики столкновений
Робот может быть оборудован манипулятором или роботической рукой. Манипулятор предоставляет возможность захвата, поднятия и перемещения объектов вокруг робота. Он состоит из суставов и схватов, которые могут быть контролируемыми и программируемыми для выполнения различных задач.
TurtleBro имеет различные коммуникационные интерфейсы для обмена данными с внешними устройствами и системами. Он может быть оборудован портами USB, Ethernet или беспроводными интерфейсами, такими как Wi-Fi или Bluetooth. Это позволяет подключать робота к компьютеру, датчикам, актуаторам и другим внешним устройствам.
Аппаратное обеспечение TurtleBro разработано с учетом гибкости, надежности и расширяемости. Это позволяет разработчикам и исследователям адаптировать робота под конкретные задачи и интегрировать его с другими системами.
Для работы с роботом TurtleBro в среде ROS необходимо выполнить несколько шагов по подключению и настройке. Подробное описание процесса подключения TurtleBro к ROS:
Первым шагом необходимо установить ROS на компьютер или на вычислительный модуль, используемый в TurtleBro. ROS предоставляет набор инструментов и библиотек для разработки робототехнического программного обеспечения. Выберите подходящую версию ROS и следуйте инструкциям по установке, предоставленным на официальном сайте ROS.
После установки ROS создайте новое рабочее пространство для разработки TurtleBro. Рабочее пространство представляет собой директорию, в которой будут храниться пакеты и исходный код вашего проекта. Выполните команду catkin_create_workspace в командной строке, чтобы создать новое рабочее пространство.
В рабочем пространстве создайте новый пакет для проекта TurtleBro. Пакет является основной единицей организации кода в ROS. Выполните команду catkin_create_pkg turtlebro для создания нового пакета с именем "turtlebro".
Укажите зависимости пакета TurtleBro, то есть другие пакеты ROS, от которых он зависит. Зависимости могут включать пакеты для работы с датчиками, управления движением и другими функциями, необходимыми для TurtleBro. Укажите зависимости в файле package.xml вашего пакета.
Создайте узлы ROS внутри пакета TurtleBro. Узлы представляют собой отдельные исполняемые файлы, которые выполняют определенные функции в системе. Например, у вас может быть узел для управления движением робота, узел для обработки данных с датчиков и т. д. Создайте необходимые узлы и напишите программный код в соответствующих файлах.
Настройте файлы конфигурации для TurtleBro, включая параметры движения, настройки датчиков и другие параметры, необходимые для работы робота. Затем запустите систему ROS, включая узлы TurtleBro, используя команды roscore и rosrun.
Проверьте работу TurtleBro в среде ROS, выполнив различные тесты и сценарии. Используйте инструменты ROS для отладки и мониторинга, чтобы выявить и исправить возможные проблемы.
Подключение TurtleBro к ROS позволяет вам использовать все возможности и инструменты, предоставляемые ROS, для разработки, управления и взаимодействия с роботом. Это позволяет легко интегрировать TurtleBro с другими системами, выполнять сложные задачи и создавать мощные приложения робототехники.
Для разработки программы управления роботом TurtleBro с использованием ROS необходимо создать пакет ROS, который будет содержать все необходимые файлы и зависимости для работы программы. Создание пакета в ROS позволяет организовать код и ресурсы в логическую единицу, облегчая разработку и управление проектом.
1) Подробный процесс создания пакета ROS:
1. Откройте терминал и перейдите в рабочую директорию ROS с помощью команды cd . Здесь — это путь к вашей рабочей директории ROS, например,
/catkin_ws.
2. Выполните команду catkin_create_pkg для создания нового пакета ROS. Например, если вы хотите назвать пакет turtlebro_control, выполните следующую команду (Листинг 1)
Листинг 1 – Создание нового пакета.
$ catkin_create_pkg turtlebro_control roscpp rospy std_msgs geometry_msgs
Здесь turtlebro_control - название вашего пакета, а roscpp, rospy, std_msgs, geometry_msgs - зависимости, которые вы хотите включить в ваш пакет. Зависимости определяют необходимые ROS-пакеты, с которыми ваш пакет будет взаимодействовать.
3. После выполнения команды catkin_create_pkg будет создана директория с именем вашего пакета (turtlebro_control) внутри вашей рабочей директории ROS. В этой директории будут находиться различные файлы и папки, необходимые для работы пакета.
Важные файлы и директории, которые обычно содержатся в пакете:
- CMakeLists.txt: Файл с инструкциями для сборки пакета с помощью CMake.
- package.xml: Файл метаданных пакета, содержащий информацию о пакете, его зависимостях и других параметрах.
- src/: Папка, в которой располагается исходный код пакета.
4. Добавьте необходимые зависимости в файл CMakeLists.txt. Откройте файл CMakeLists.txt вашего пакета и найдите секцию find_package и catkin_package. Внутри этих секций вы можете указать дополнительные зависимости, если они не были указаны при создании пакета.
Например, если ваш пакет также требует зависимость sensor_msgs, вы можете добавить следующую строку (Листинг 2).
Листинг 2 – Добавить завимисимость.
$ find_package(catkin REQUIRED COMPONENTS sensor_msgs)
Затем в секции catkin_package добавьте sensor_msgs в список зависимостей (Листинг 3).
Листинг 3 – Добавить в список зависимостей.
$ CATKIN_DEPENDS roscpp rospy std_msgs geometry_msgs sensor_msgs
Сохраните изменения в файле CMakeLists.txt.
5. Теперь ваш пакет ROS готов к использованию. Вы можете начинать разрабатывать программу управления внутри папки src/ вашего пакета, создавая новые файлы и наполняя их кодом.
6. Чтобы собрать ваш пакет, вернитесь в терминал и перейдите в вашу рабочую директорию ROS. Выполните команду catkin_make для сборки пакетов (Листинг 4).
Листинг 4 – Собрать пакет.
$ cd
$ catkin_make
catkin_make скомпилирует все пакеты в вашей рабочей директории ROS, включая вновь созданный пакет turtlebro_control.
Теперь у вас есть полноценный пакет ROS, готовый к разработке программы управления роботом TurtleBro с использованием ROS. Вы можете добавлять новые узлы, публиковать и подписываться на топики, вызывать сервисы и использовать другие функции ROS внутри вашего пакета для реализации нужной функциональности.
В ROS узлы представляют собой независимые исполняемые файлы или процессы, которые выполняют определенные задачи в системе. Узлы взаимодействуют друг с другом путем передачи сообщений через топики или вызова сервисов.
2) Создание узла:
Для создания узла в ROS необходимо создать исполняемый файл (обычно в формате .cpp или .py), который будет выполнять определенные задачи. В этом файле вы должны импортировать необходимые библиотеки ROS и определить функцию main(), которая будет являться точкой входа для вашего узла.
Пример создания узла на языке Python показан на рисунке 1.
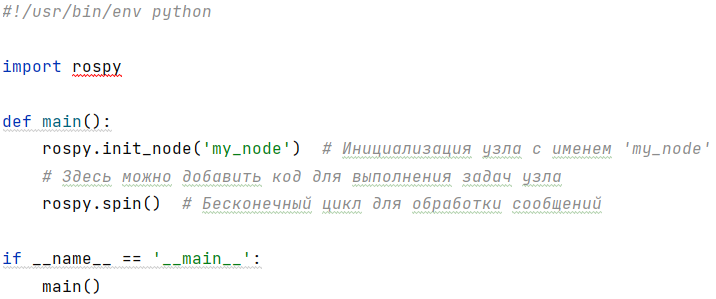
Рисунок 1 – Создание узла.
Здесь rospy.init_node('my_node') инициализирует узел с именем my_node. rospy.spin() запускает бесконечный цикл, который ожидает и обрабатывает сообщения.
3) Создание топиков:
Топики в ROS используются для передачи сообщений между узлами. Топик представляет собой именованный канал, через который узлы могут публиковать сообщения или подписываться на них.
Пример создания топика на языке Python показан на рисунке 2
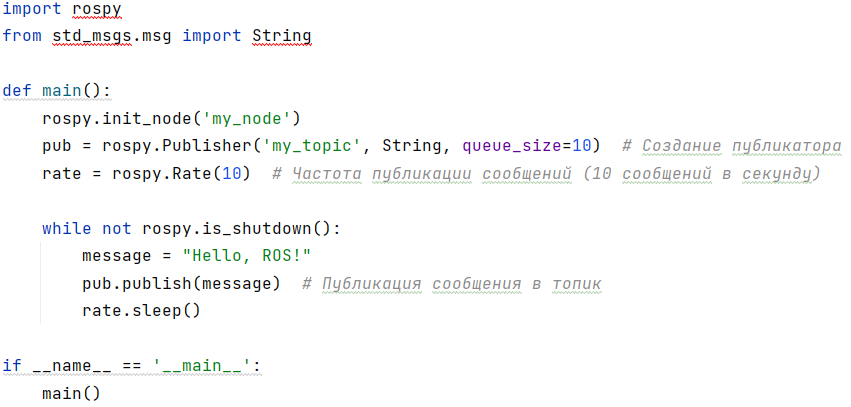
Рисунок 2 – Создание топика.
В этом примере создается публикатор (rospy.Publisher) с именем my_topic, который публикует сообщения типа String. Частота публикации сообщений задается с помощью объекта rate, который определяет интервал между публикациями.
Обратите внимание, что для использования типа сообщения (String в данном случае) необходимо импортировать соответствующую библиотеку (std_msgs.msg).
Вы также можете создавать подписчиков (rospy.Subscriber), которые подписываются на топик и обрабатывают полученные сообщения.
Это только базовый пример создания узла и топика в ROS. В дальнейшем вы можете добавить дополнительную логику, обработку сообщений, подписку на другие топики и т. д., в зависимости от требований вашей программы управления роботом TurtleBro.
Для эффективного управления роботом TurtleBro важно уметь работать с его датчиками. TurtleBro обычно оснащен различными датчиками, такими как датчики расстояния (например, ультразвуковые датчики), датчики обнаружения препятствий и другие. В этом пункте мы рассмотрим подробнее работу с датчиками TurtleBro.
-
Изучение спецификаций:
Первым шагом является изучение спецификаций робота TurtleBro и его датчиков. Ознакомьтесь с документацией TurtleBro или руководством пользователя, чтобы узнать, какие датчики доступны, какие данные они предоставляют и каким образом они взаимодействуют с ROS.
-
Подключение датчиков:
В зависимости от типа датчиков TurtleBro, необходимо подключить их к роботу и настроить соответствующее оборудование. Это может включать подключение датчиков к физическим портам или шинам на роботе, установку необходимых драйверов и настройку параметров датчиков.
-
Чтение данных с датчиков:
В ROS данные с датчиков обычно передаются через топики. Для получения данных с датчиков TurtleBro вы можете создать подписчика на соответствующий топик и обрабатывать полученные данные.
Пример чтения данных с датчика расстояния на языке Python показан на рисунке 3.
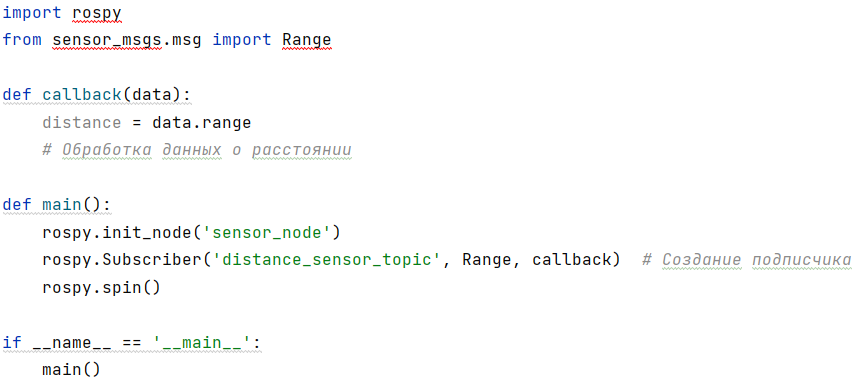
Рисунок 3 – Чтение данных с датчика.
В этом примере создается подписчик (rospy.Subscriber) на топик с именем distance_sensor_topic, который публикует сообщения типа Range. В функции обратного вызова callback вы можете обрабатывать данные о расстоянии, полученные с датчика.
Обратите внимание, что в этом примере используется тип сообщения Range из пакета sensor_msgs. Для работы с другими датчиками TurtleBro вам может потребоваться использовать другие типы сообщений, соответствующие конкретным датчикам.
Важно проверить, какие данные предоставляются датчиками TurtleBro и какой тип сообщения используется для передачи этих данных. Это позволит вам правильно настроить подписчика и обработать полученные данные.
-
Обработка данных:
Полученные данные с датчиков могут быть использованы для принятия решений в программе управления. Например, данные о расстоянии от датчика препятствий могут быть использованы для определения, когда робот должен изменить направление или остановиться, чтобы избежать столкновений.
В зависимости от требований вашей программы управления вам может потребоваться обрабатывать и анализировать данные с нескольких датчиков TurtleBro и принимать соответствующие управляющие решения.
Пример обработки данных о расстоянии на языке Python показан на рисунке 4.
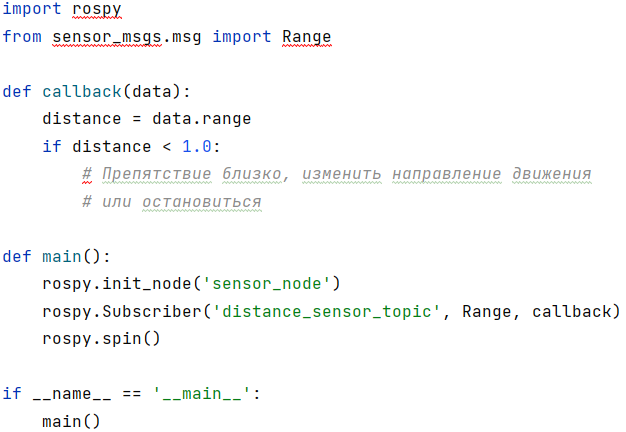
Рисунок 4 – Обработка данных о расстоянии.
В этом примере, если расстояние от датчика препятствий меньше 1.0 метра, то выполняется определенное управляющее действие, например изменение направления движения или остановка робота.
Обратите внимание, что обработка данных с датчиков должна быть адаптирована под требования вашей программы управления и конкретные особенности TurtleBro.
Работа с датчиками TurtleBro в ROS позволяет получать информацию о состоянии окружающей среды и принимать решения на основе этих данных. Используйте спецификации TurtleBro и документацию ROS для определения доступных датчиков и способов их использования в вашей программе управления.
Управление движением TurtleBro является одной из ключевых задач при разработке программы управления с использованием ROS. В этом пункте мы рассмотрим подробнее различные аспекты управления движением TurtleBro.
-
Определение типа движения:
Первым шагом является определение типа движения, которое вы хотите реализовать для TurtleBro. Например, это может быть прямолинейное движение, поворот, остановка или движение по заданному маршруту. Определение типа движения поможет вам выбрать соответствующие команды и методы управления TurtleBro.
-
Использование команд управления:
В ROS для управления TurtleBro вы можете использовать команды управления, которые отправляются через соответствующие топики. Например, для управления движением TurtleBro вперед вы можете использовать команду типа Twist, которая задает линейную и угловую скорости робота.
Пример отправки команды движения на языке Python показан на рисунке 5.
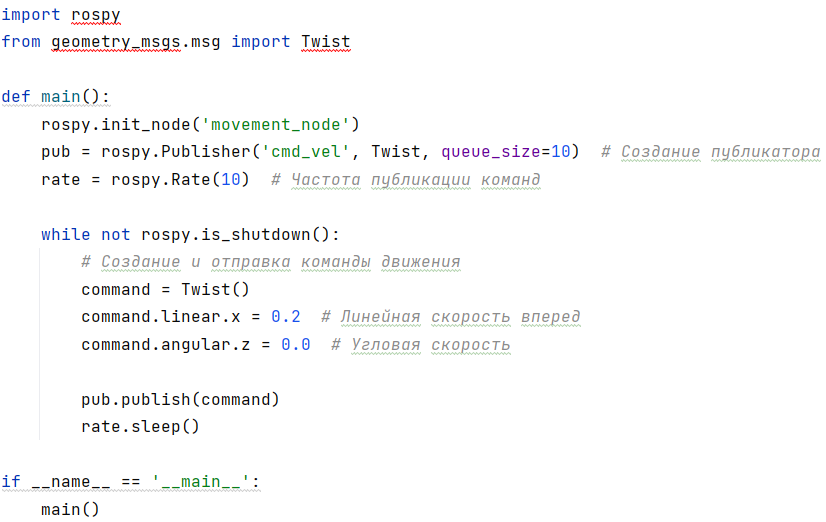
Рисунок 5 – Отправка команды движения.
В этом примере создается публикатор (rospy.Publisher) на топик с именем cmd_vel, который принимает сообщения типа Twist. В цикле while создается и отправляется команда движения с заданными значениями линейной и угловой скоростей.
Обратите внимание, что в этом примере используется тип сообщения Twist из пакета geometry_msgs. В зависимости от требований вашей программы управления вы можете использовать другие типы сообщений для более сложного управления движением TurtleBro.
-
Использование навигационного стека ROS:
Для более сложного управления движением и навигацией TurtleBro вы можете воспользоваться навигационным стеком ROS, который предоставляет функциональность планирования пути, локализации и управления движением на основе карты окружающей среды. Навигационный стек ROS включает в себя модули, такие как move_base, amcl, map_server и другие.
Использование навигационного стека ROS требует настройки конфигурационных файлов, создания карты окружающей среды и определения параметров для планирования пути и локализации. Детальное описание работы с навигационным стеком ROS выходит за рамки данной работы, но вы можете обратиться к официальной документации ROS для получения более подробной информации.
Управление движением TurtleBro в ROS предоставляет гибкость и мощные возможности для разработки программ управления. Выбор подходящих команд и методов управления зависит от типа движения, которое вы хотите реализовать, и требований вашей программы. Обратитесь к спецификациям TurtleBro и документации ROS для определения доступных команд и методов управления движением TurtleBro.