Файл: Экзамен динамическое проектирование систем наведения ла.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 20
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ЭКЗАМЕН
Динамическое проектирование систем наведения ЛА
гр. ИУ1-102
18.06.2021
| Фамилия Имя Отчество | № билета | Вопросы билета | Ответы |
| Холостов Даниил Константинович уд/хор | 1 | Методы стабилизации ракеты в полете. 3: Много лишнего и не полный ответ на вопрос | Методы стабилизации ракеты в полете Система стабилизации – это совокупность устройств, расположенных на ЛА для обеспечения сохранения требуемого углового положения данного ЛА. Задачи, решаемые системой стабилизации: · Исправление и улучшение динамических характеристик ракеты; · Подавление внешних возмущающих воздействий; · Контроль перегрузок, оказываемых на ракету. При этом для исправления динамических характеристик ЛА система стабилизации должна удовлетворять следующим требованиям: · Свободные колебания системы стабилизации должны быть задемпфированы. Коэффициент демпфирования в данном случае выбирается так, чтобы запасы устойчивости по амплитуде и фазе, а также перерегулирование переходной характеристики лежали в некотором заданном диапазоне. · Динамические характеристики самой системы стабилизации должны в минимальной степени зависеть от режима полета, чтобы не оказывать дополнительного воздействия. · Система стабилизации должна иметь ширину полосы пропускаемых частот не меньше некоторой заданной. Рассмотрим методы стабилизации на примере стабилизации угла крена. 1. Стабилизация с ОС. Для стабилизации угла крена, требуется измерять отклонение фактического угла крена от заданного, для чего необходим свободный гироскоп. С помощью свободного гироскопа, измеряющего ошибку стабилизации (разность между заданным и действительным углом крена), ЛА охватывается ОС по углу крена. Сигнал ошибки поступает в рулевой привод, который отклоняет органы управления креном таким образом, чтобы создать момент, направленный на уменьшение ошибки. 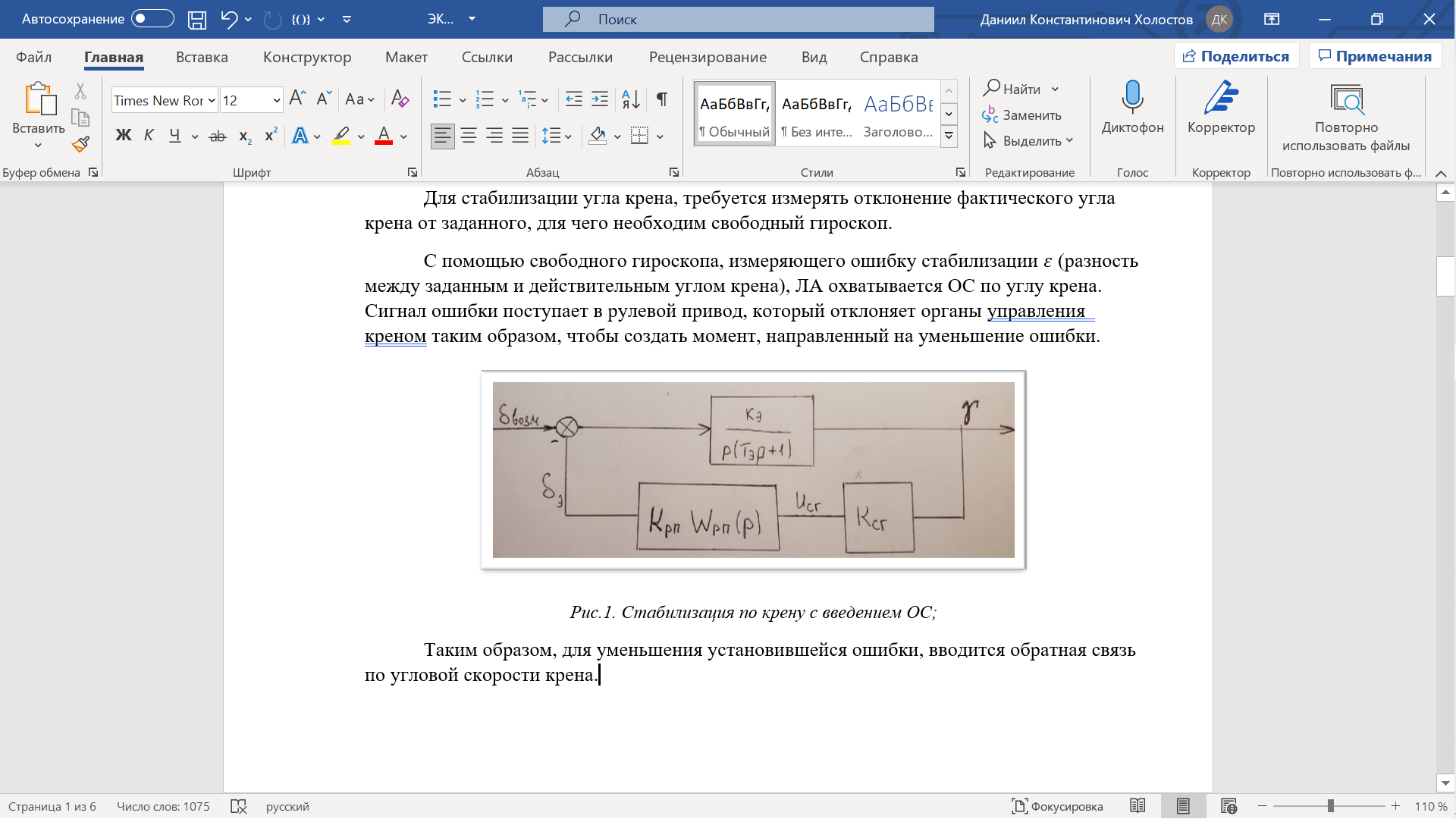 Таким образом, для уменьшения установившейся ошибки, вводится обратная связь по угловой скорости крена. 2. Статические системы стабилизации. Основное назначение ОС по угловой скорости состоит в обеспечении демпфирования, которое может быть достигнуто различными способами, в том числе измерением угловой скорости крена с помощью дифференцирующего гироскопа или дифференцированием сигнала со свободного гироскопа с помощью — RC-фильтра. Рассмотрим первый случай, при котором сигнал управления формируется в соответствии с передаточной функцией: 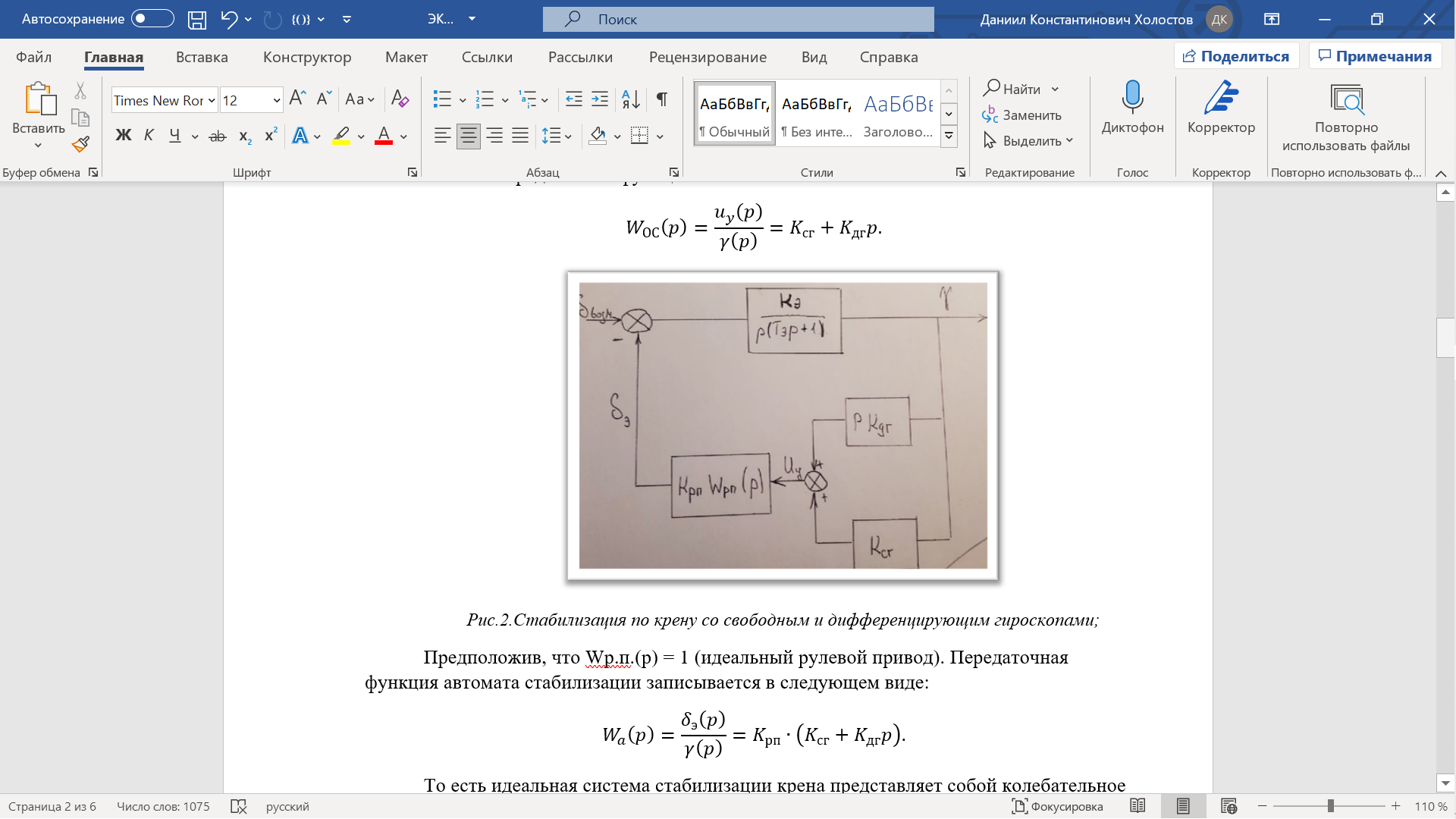  3. Астатические системы стабилизации. В тех случаях, когда к точности стабилизации угла крена предъявляются повышенные требования, для устранения установившихся ошибок применяются астатические системы стабилизации. При этом интегрирование может осуществляться путем использования рулевого привода с изодромной ОС в системе стабилизации со свободным и дифференцирующим гироскопами. Также есть второй вариант астатической системы стабилизации крена, который состоит в комбинации свободного гироскопа с интегрирующим при рулевом приводе с жесткой ОС. В данном случае для введения интегрирования электрический сигнал свободного гироскопа должен подаваться на моментный датчик интегрирующего гироскопа. |
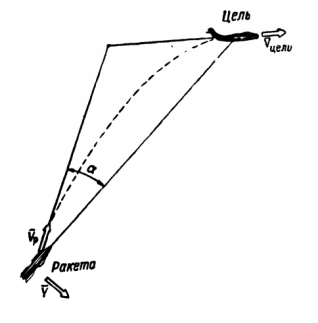
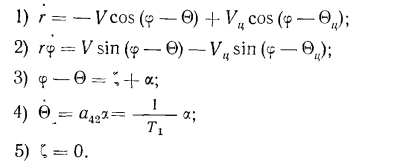
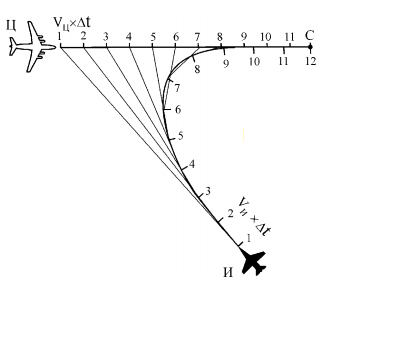
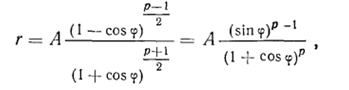
| Метод пропорционального сближения. 5 | 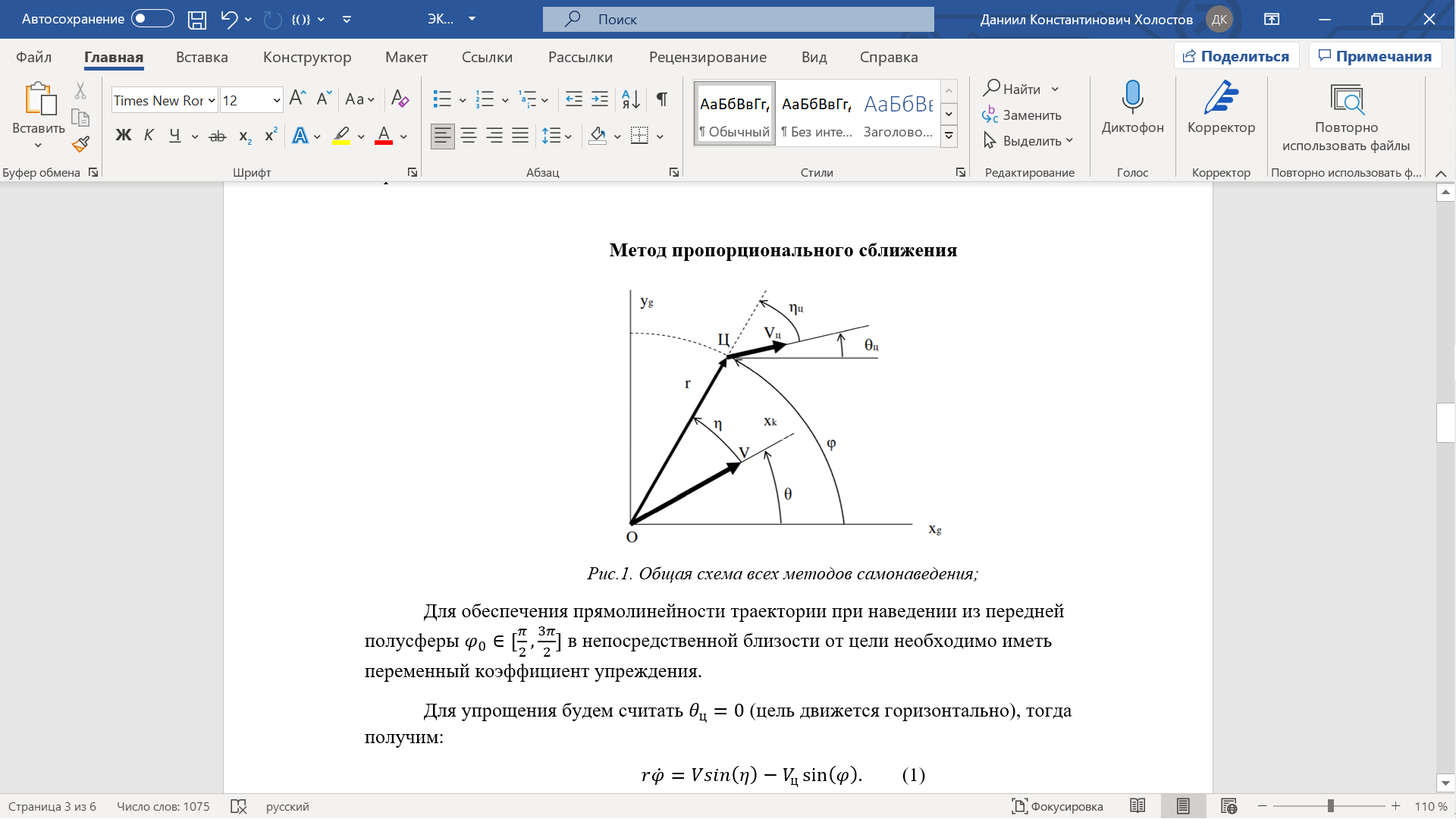 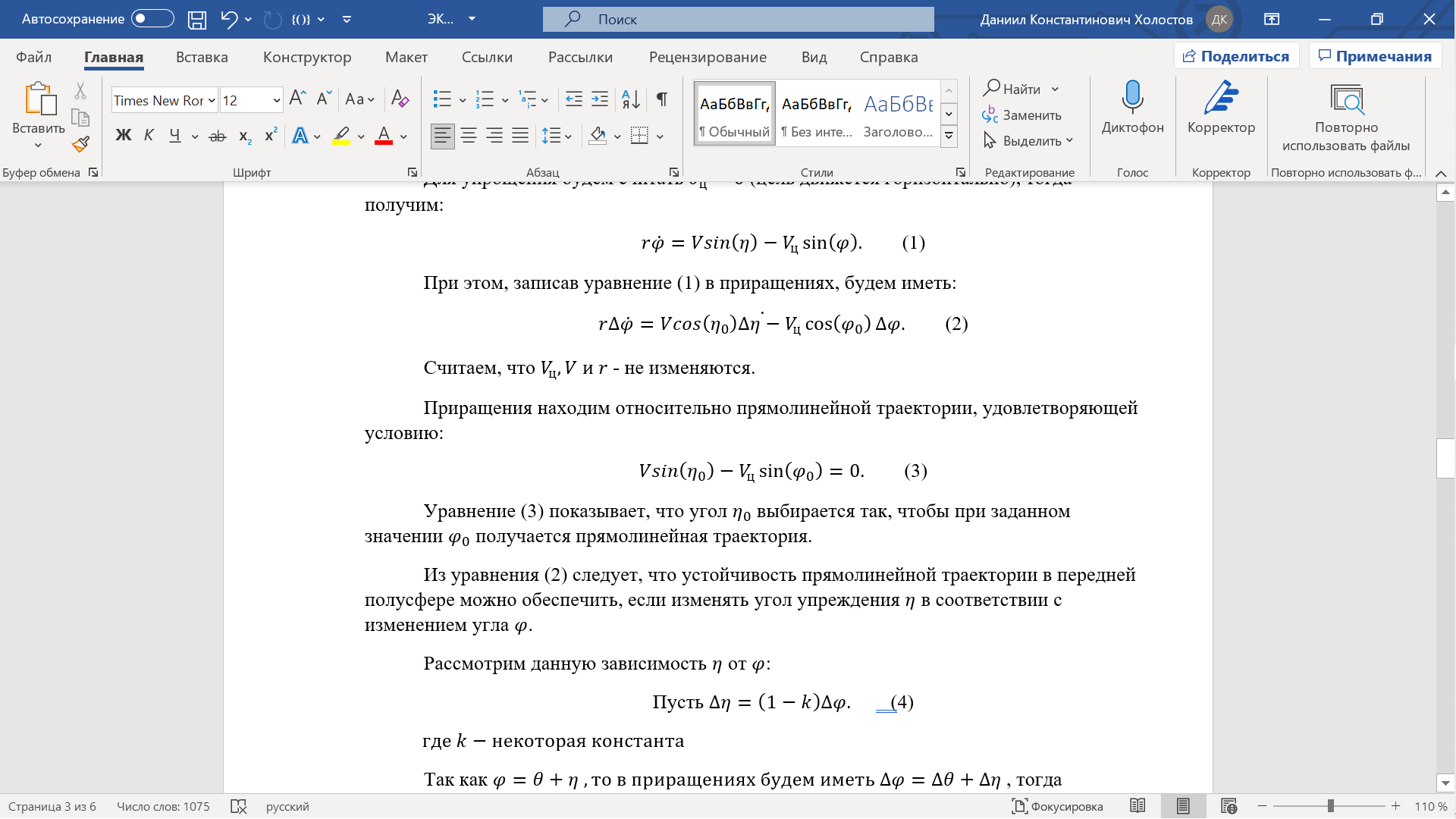    | ||
| Особенности динамики систем управления ракетами зенитно-ракетных комплексов 3: О динамике – почти ничего | Особенности динамики систем управления ракет ЗРК В общем случае наведение объекта на цель состоит из трех участков (дальний, средний и ближний рубежи). На начальном и среднем этапах используется автономное (инерциальное) наведение с помощью инерциального блока, находящегося на самой ракете. Траектория движения ракеты при этом задается в её бортовой вычислитель заранее, перед пуском. Для обеспечения лучшей точности наведения используется коррекция траектории по радиосигналам, присылаемым с пункта управления (ПУ). Дальнейшее наведение ракеты зависит от наличия или отсутствия маневрирования цели: · Если цель не совершает маневров, ракета продолжает автономный полет с помощью инерционного блока. · Если цель маневрирует, то с ПУ на ракету подаются соответствующие команды, изменяющие координаты цели, тем самым внося изменения в траекторию движения ракеты. При подлете ракеты на некоторое заданное расстояние цель захватывается головкой самонаведения (ГСН), находящейся, как правило, в носовой части ракеты. При этом осуществляется полуактивное самонаведение, так как ракета с помощью ГСН только улавливает отраженный от цели сигнал, выпущенный из ПУ. Преимущества управления ракетами ЗРК: · Высокая производительность комплекса; · Высокая дальность поражения; · Повышенная помехоустойчивость комплекса (благодаря использованию автономного наведения на начальном и среднем участка траектории); · Возможность перенацеливания ракеты в полёте и повторного захвата цели благодаря радиокоррекции из ПУ. Недостатки управления ракетами ЗРК: · Траектории полета на начальном этапе часто не оптимизированы, что повышает расход топлива, снижает быстродействие и дальность полета; · Эффективность тепловых ГСН сильно снижается при использовании целью ложных целей. Способы исправления недостатков: · Для оптимизации траекторий движения в ракеты вводят двухсторонний канал связи между ракетой и ПУ, что в совокупности с улучшенным программным обеспечением позволяет увеличить дальность и быстродействие комплекса благодаря возможности управления полетом ракеты на начальном участке; · Для лучшей селекции цели помимо стандартных тепловых ГСН также добавляют моноимпульсную радиолокационную ГСН, что снижает эффективность использования ложных целей. Однако, при введении данных изменений повышается стоимость ракеты, а также её помехозащищенность и незаметность (особенно на начальном этапе). Поэтому выбор конфигурации конкретной ракеты сильно зависит от типа цели, которую ей необходимо захватить. | ||
| Тупицын Антон Максимович уд/хор | 3 | Радиолокационные головки самонаведения. Принципы действия и схемы построения. 3: Не показал, как получается информация о цели. | Активная радиолокационная система самонаведения Самонаведение ракеты с помощью активной радиолокационной системы самонаведения возможно благодаря тому, что цель иначе, чем окружающий ее фон, отражает радиоволны. Для выявления этого эффекта источник радиоволн, установленный на ракете, облучает цель так же, как и обычный радиолокатор. Отраженные от цели сигналы содержат сведения? о положении и о параметрах движения цели. Эти сигналы принимаются приемным устройством ракеты, усиливаются, преобразуются и после разложения по двум каналам управления подаются на вход автоматического устройства наведения ракеты. Комплекс аппаратуры, включающий приемно-передающую антенну, передатчик, приемник, преобразовательные и вычислительные блоки, называют радиолокационным координатором. Координатор непрерывно и автоматически определяет направление на цель и параметры ее движения. Блок-схема координатора (рис. 11) не отличается от типичной блок-схемы радиолокационной станции. Однако имеются особенности. Координаторы обычно компактны, потребляют небольшую электрическую мощность. Все элементы координатора размещаются, как правило, в носовой части ракеты, а антенна закрыта прозрачным для радиоволн обтекателем. Обтекатель должен выдерживать значительные аэродинамические нагрузки и высокую температуру, возникавшую вследствие трения ракеты о воздух при сверхзвуковых скоростях полета.  Применяются в ракетах классов «воздух-воздух», «земля-воздух», противокорабельных. Полуактивная радиолокационная система самонаведения Бортовое оборудование ракеты с такой системой самонаведения состоит из полуактивного радиолокационного координатора цели и хвостового приемника. Полуактивный радиолокационный координатор цели по конструкции сходен с активным. Различие состоит лишь в том, что в нем нет передатчика, облучающего цель. Радиолокационный передатчик для облучения цели размещается на самолете-носителе, на земле или на корабле, «подсвечивая» цель, а также передавая на ракету синхронизующие сигналы. Для надежного наведения ракеты на цель необходимо, чтобы цель непрерывно облучалась электромагнитной энергией, т. е. чтобы антенна радиолокационного передатчика была постоянно направлена на цель, а в случае подвижной цели автоматически сопровождала ее. Для этого применяют радиолокатор с автоматическим сопровождением цели. Блок-схема полуактивного радиолокационного координатора приведена на рис. 22. Полуактивный радиолокационный координатор по сравнению с активным имеет существенный недостаток — невозможность селектировать и сопровождать цель по дальности. Это может привести к тому, что бортовой координатор при появлении в поле зрения его антенны другой цели может самопроизвольно изменить объект атаки. Для того чтобы этого не произошло, в хвостовой части ракеты дополнительно устанавливают вспомогательный приемник, предназначенный для приема сигналов от радиолокационной станции подсвета. Это позволяет синхронизировать работу полуактивного координатора с радиолокационной станцией подсвета так, чтобы на ракете, кроме угловых координат цели, можно было изменять дальность до цели или скорость изменения дальности. 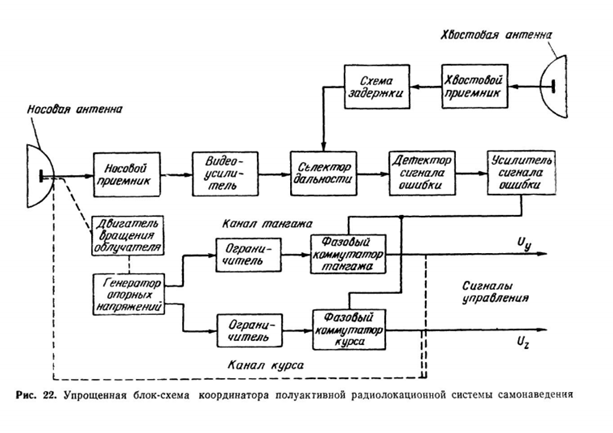 Применяются в ракетах классов «воздух-воздух», «земля-воздух» Пассивная радиолокационная система самонаведения По схеме построения схожа с полуактивной радиолокационной системой самонаведения. Наводится на излучение цели (РЛС противника). Применяется в противолокационных ракетах |
| Виды систем теленаведения. 4: Не все виды | 3.2 Лебедев каробанов с28-29 пункт 2.3 Телеуправление — управление полетом ЛА с пункта управления (командного пункта) с использованием, например, радиосредств: СКРУ — системы командного радиоуправления (СКРУ-1, СКРУ-2); СУРЛ - системы управления в радиолуче - «наведение от себя» (СН ракет); СУРЗ -— системы управления в радиозоне - «наведение на себя» (радиомаячные и радиолокационные системы посадки). Системы командного радиоуправления СКРУ первого вида - измерители (датчики информации) полностью размещаются на ПУ, «визир/координатор» на ПУ, хц, ху, хт, Δх формируются на ПУ: · каналы извлечения информации о цели/ОУ (ПУ); · каналы передачи радиокоманд / радиокоррекции (РК) ПУ - ОУ; СКРУ второго вида - измерители (датчики информации) частично на ПУ, а частично на борту ОУ — хц «визир/координатор» на ОУ, а ху, хт, Δх формируются на ПУ: · канал извлечения информации о цели (датчики на ОУ); · канал передачи информации о цели ОУ - ПУ (передающее устройство - на ОУ, приемное устройство - на ПУ); · каналы передачи радиокоманд / радиокоррекции (РК) ПУ - ОУ. 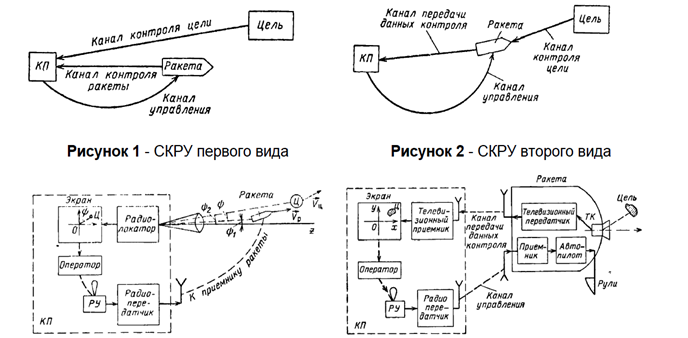 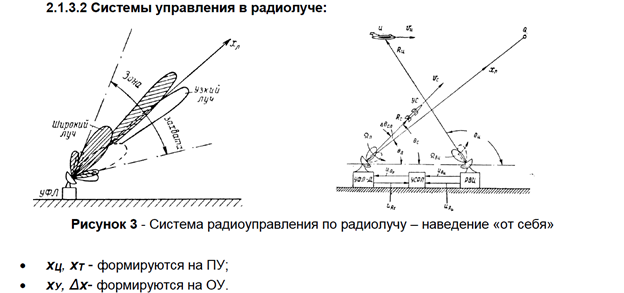 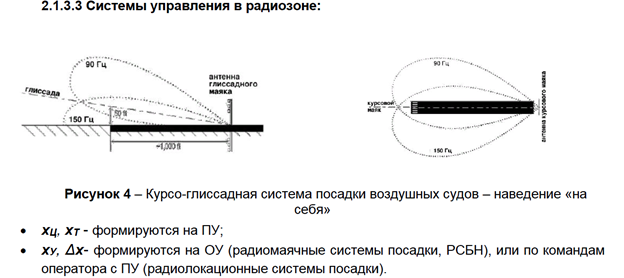 | ||
| Особенности динамики систем управления баллистическими ракетами на нисходящем атмосферном участке 3: о динамических свойствах – почти ничего | Лебедев карабанов с266-267 Глава 9 Наведение и навигация Бал. Ракет Ракетный комплекс 15А18М «Воевода» с многоцелевой межконтинентальной баллистической ракетой тяжёлого класса предназначен для поражения всех видов наземных целей, защищённых современными средствами ПРО, в любых условиях боевого применения, в том числе при многократном ядерном воздействии по позиционному району. Его применение позволяет реализовать стратегию гарантированного ответного удара. Управляемый боевой блок (УББ) для 15А18М под индексом 15Ф178 имел форму острого конуса высотой около двух метров, нижняя часть которого - "юбочка" - могла отклоняться в двух плоскостях. Она представляла собой аэродинамический руль, использовавшийся на атмосферном участке движения. За пределами атмосферы блок управлялся двигателями системы ориентирования и стабилизации, а рабочим телом служила жидкая углекислота. Система управления ракетой продумывалась таким образом, чтобы достигались сразу несколько целей: 1) Обеспечивалась работоспособность после воздействий ядерного взрыва в полете. 2) Разводились боевые блоки максимально высокоточно. 3) Использовался прямой метод наведения, не требующий подготовки специального полётного задания. 4) Обеспечивается дистанционное нацеливание. Ракета Р-36М2 «Воевода» оснащается совершенным и модернизированным комплексом средств, способных преодолевать ПРО и прорывать систему СОИ. В ракете имеются 10 боевых блоков, которые прикрыты сбрасываемым в полете обтекателем, - они размещаются на специальной раме в два ряда На второй ступени применена двигательная установка, состоящая из работающего по замкнутой схеме основного однокамерного двигателя 15Д7Э (РД-0229) и четырёхкамерного рулевого двигателя 15Д83 (РД-0230), работающего по открытой схеме. Ракета оснащена специальными датчиками, которые измеряют нейтронное и гамма-излучение, регистрируя опасный уровень. Когда ракета проходит ядерный «гриб», система управления выключается, но двигатели продолжают работу. Межконтинентальная баллистическая ракета «Воевода» имеет продуманную систему управления, которая скрыта в герметичном корпусе приборного отсека. Система остаётся стабилизированной до тех пор, пока ракета не покинет опасную зону. После этого автоматика включается, и системой управления корректируется траектория комплекса. | ||
| Ле Хыу Туан отл. | 6 | Органы управления современными ракетами. Особенности управления плоскокрылыми и крестокрылыми ракетами. 5 | Лебедев с 41 параграф 5 Ответы фонга билет 1 оболенмкий Для получения требуемой по величине и направлению нормальной силы необходимо регулировать угловое положение ЛА в пространстве. Эта задача решается путем создания управляющих моментов, которые вращают ЛА вокруг трех его осей Ох, Оу и Оz, проходящих через центр масс, с помощью органов управления. Они создают сравнительно небольшие аэродинамические или газодинамические силы, моменты, которые относительно центра масс ЛА, являются достаточными для управления угловыми движениями ЛА. Поворотные крылья создают одновременно и большую часть нормальной силы и управляющий момент. Сопло располагающееся в центре масс ЛА призвано создавать только нормальную часть управляющей силы. Управляющие моменты относительно осей Оу и Ох (моменты рыскания и тангажа) могут быть созданы как с помощью аэродинамических, так и реактивных сил. Для создания управляющих моментов с помощью аэродинамических сил используются воздушные рули различных типов или поворотные крылья. Для образования управляющих моментов с помощью реактивных сил применяются газовые рули, поворотные маршевые двигатели, а также специальные рулевые двигатели. На рис.2.3 показана комбинированная схема аэродинамического и газодинамического управления с четырьмя устройствами управления, создающими следующие управляющие моменты: + Аэродинамический (создается силой при отклонении аэродинамического руля на угол) + Газодинамический (создается силой с помощью газового руля, поворотного сопла и др.)., и управляющие поперечные силы: + аэродинамическая (создается отклонением поворотного крыла на угол) + газодинамическая (создается двигателем поперечного управления) 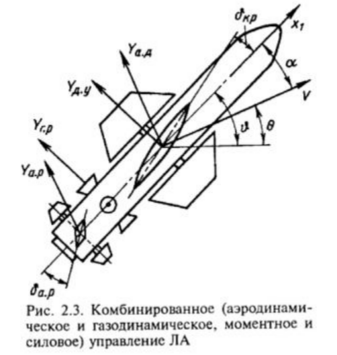 При повороте ЛА на угол атаки (поворот происходит с запаздыванием по отношению к управляющему моменту) возникает управляющая поперечная аэродинамическая сила от конструкции ЛА и газодинамическая от маршевого двигателя. Плоскокрылые: Если ЛА может создавать нормальную силу лишь в одной продольной плоскости Оху, связанной с ЛА, то для изменения нормальной силы в пространстве ЛА должен быть повернут относительно своей продольной оси Ох. Такой способ управления нормальными силами называют управлением в полярных координатах. Примером управления в полярных координатах может служить ЛА обычной самолетной схемы, т. е. с крыльями, расположенными в одной плоскости. В этом случае для создания нормальной силы различной различных направлениях ЛА должен изменять углы атаки и крена. Т.е. в случае полярного управления проблемно разделение каналов как в асимметрических ЛА. Крестокрылые: Другой способ получения нормальной силы в любых направлениях состоит в геометрическом сложении нормальных сил, создаваемых в двух взаимно перпендикулярных плоскостях; при этом предварительного накренения ЛА уже не требуется (управление в декартовых координатах). Таким способом, а именно путем сочетания определенных углов атаки и скольжения, создают нормальную силу крылатые ЛА с + и х-образными и кольцевыми крыльями, а также бескрылые ЛА с тягой двигателя, направленной вдоль продольной оси корпуса. Управление в декартовых координатах может также применяться у ЛА с поперечными двигателями. В данном случае для корректной реализации такой схемы управления, необходима быстрая и точная работа системы стабилизации, для возможности разделения каналов. Так же, например, при наведении по командам сигналы наведения формируются в координатах командного пункта, в таком случае необходимо согласование СК связанных с ЛА. |
Автономные системы наведения в процессе полёта ЛА не получают никакой информации ни от цели, ни от командного пункта, ни от какого-либо другого искусственного источника информации, например, от радиомаяка. Аппаратура наведения, целиком размещённая на борту ЛА, определяет его местонахождение относительно земной поверхности, вычисляет отклонения от заданной траектории полёта и в соответствии с этими отклонениями вырабатывает сигналы наведения. С математической точки зрения наведение в автономных системах очень похоже на решение краевой задачи, только при наличии неконтролируемых возмущений.
Для определения координат центра масс ЛА используются инерциальная навигационная система, основанная на измерении ускорений при помощи акселерометров и использовании инерционных свойств гироскопов. ИНС можно разделить на два класса: платформенные и бесплатформенные (БИНС). Наличие интегрирования в ИНС подчёркивает ошибки, имеющие ненулевую среднюю составляющую (т.н. дрейфы). Эти системы работают на частотах примерно до кГц-диапазона, т.к. на более высоких частотах присутствует больше случайных ошибок – шумов.
Для коррекции ИНС используют спутниковую навигационную систему (СНС), наземные станции (маяки), пассивные ориентиры, магнитометрические способы, астронавигацию, корреляционно-экстремальные навигационные системы (обрабатывающие изображения, полученные в различных диапазонах, необязательно только в видимом спектре), высотомеры.
В системах теленаведения бортовые устройства получают информацию от источника, находящегося вне ЛА: с командного пункта (станции наведения (СН)), радиомаяков и т.п. Основным достоинством систем теленаведения является возможность использования более достоверной информации о цели. Основной недостаток – СН вынуждена сопровождать ОУ на всём участке теленаведения.
Системы теленаведения можно разбить на два подкласса:
-
лучевые системы теленаведения; -
командные системы наведения.
При лучевом управлении со СН в каждый момент времени задаётся положение луча, в котором должен находится ОУ. Задача нахождения в этом луче решается на самом ОУ.
В командных системах наведения на ОУ подаются команды управления, рассчитанные на СН и обеспечивающие его движение по траектории наведения.
Стоит отметить, что в системах теленаведения информация о цели может получаться как на СН, так и на борту ЛА с последующей передачей на СН. При этом сигнал наведения вырабатывается только на СН.
В системах самонаведения устройства, находящиеся на борту ЛА, получают информацию о цели непосредственно от цели при помощи координатора цели (КЦ), и содержат устройства выработки команд. По принципу работы КЦ различают на пассивные (используют излучение от цели, для чего чувствительные элементы КЦ должны обладать высокой чувствительностью, а цель должна контрастировать), полуактивные (осуществляется подсвет цели с носителя или какого-либо другого объекта) и активные (подсвет цели осуществляет сама ГСН).
Блок-схема системы самонаведения:
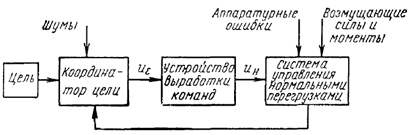
Для получения сигнала ошибки
 КЦ определяет положение цели относительно системы осей, связанных с КЦ и ориентированных в пространстве определённым образом в зависимости от принятого метода наведения. Далее вырабатывается сигнал наведения
КЦ определяет положение цели относительно системы осей, связанных с КЦ и ориентированных в пространстве определённым образом в зависимости от принятого метода наведения. Далее вырабатывается сигнал наведения  , поступающий, например, в систему управления нормальными перегрузками, в результате действия которых изменяется направление вектора скорости полёта ЛА и, следовательно, положения цели относительно осей, связанных с КЦ.
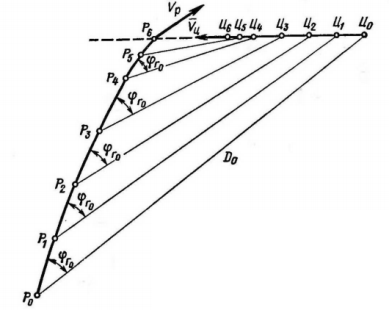
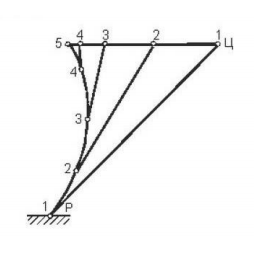
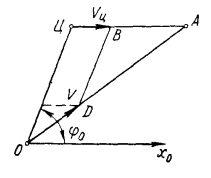
, поступающий, например, в систему управления нормальными перегрузками, в результате действия которых изменяется направление вектора скорости полёта ЛА и, следовательно, положения цели относительно осей, связанных с КЦ.Системы самонаведения используют следующие методы наведения: метод прямого наведения, метод погони, методы наведения с постоянным углом упреждения, метод пропорционального сближения и метод параллельного сближения.
Комбинированные системы наведения применяют, чтобы удовлетворить сложным тактико-техническим требованиям и использовать преимущества и сгладить недостатки различных методов наведения. Например, часто используется следующий вариант комбинации систем наведения:
-
автономное наведение на начальном участке траектории при большой дальности до цели и незначительных требований к точности; -
наведение по командам или по лучу на среднем участке для повышения точности и учёта движения цели; -
самонаведение на конечном участке.
| | | Динамика систем автономного наведения | Лебедев карабанов с 27 и 224 |
| | | ||
| | | ||
| | | | |
| | | ||
| | | ||
| | | | |
| | | ||
| | | ||
| | | | |
| | |||
| | |||
| | | | |
| | |||
| | |||
| | | | |
| | |||
| | |||
| | | | |
| | |||
| |