ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.10.2023
Просмотров: 14
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Практическое задание 1
Тема 1. Структура механизмов
Задание
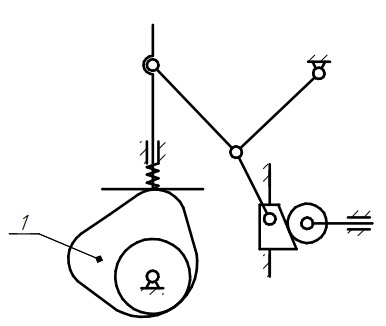
Рассмотреть кинематическую схему многозвенного механизма, определить число звеньев и кинематических пар, дать характеристику кинематическим парам и определить степень подвижности механизма. Разложить механизм на группы Ассура и записать формулу образования механизма. Вычертить структурную схему механизма. Ведущее звено указать
стрелкой. Пронумеровать звенья арабскими цифрами в порядке их присоединения к ведущему звену. Кинематические пары обозначить буквами латинского алфавита А, В, С и т. д., а неподвижные пары – буквами O1, О2, О3 и т. д. При наличии в основном механизме кинематических пар 4-го класса произвести их замену кинематической цепью с парами 5-го класса и определить степень свободы заменяющего механизма по формуле П.Л. Чебышева.
Решение:
Дадим названия звеньям по характеру их движения. Сведем все в таблицу 1.1.
Таблица 1.1 – Обозначение звеньев механизма
| Кинематическая схема | Звенья механизма |
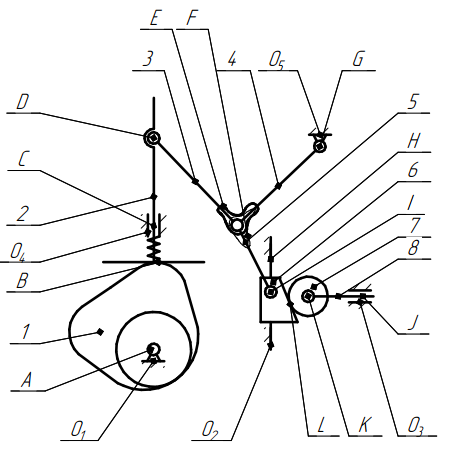 | 1 – кривошип 2 – ползун 3 – шатун 4 – коромысло 5 – шатун 6 – ползун 7 – ролик 8 – ползун 0 – стойка |
Разбиваем механизм на звенья, начиная с ведущего. Ведущим является кулачек 1. Выходным звеном является звено 7, совершающее поступательное движение. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. В зависимости от характера соприкосновения звеньев кинематическая пара может быть низшей или высшей.
Характеристику кинематических пар сведем в таблицу 1.2.
Таблица 1.2 – Характеристика кинематических пар
| Обоз-наче-ние пары | Звенья, образующие пару | Подвижность пары (одно- или двухподвижная), класс пары | Разновидность пары: высшая или низшая; вращательная или поступательная |
| A | Кривошип - стойка | Одноподвижная, класс 5 (Р5) | Высшая |
| В | Кривошип – ползун | двухподвижная, класс 4 (Р4) | Высшая |
| С | Ползун - стойка | Одноподвижная, класс 5 (Р5) | Низшая, поступательная |
| D | Ползун – шатун | Одноподвижная, класс 5 (Р5) | Низшая, вращательная |
| E | Шатун – коромысло | Одноподвижная, класс 5 (Р5) | Низшая, вращательная |
| F | Шатун – коромысло | Одноподвижная, класс 5 (Р5) | Низшая, вращательная |
| G | Коромысло - стойка | Одноподвижная, класс 5 (Р5) | Низшая, вращательная |
| H | Ползун - стойка | Одноподвижная, класс 5 (Р5) | Низшая, поступательная |
| I | Ползун – шатун | Одноподвижная, класс 5 (Р5) | Низшая, вращательная |
| J | Ползун - стойка | Одноподвижная, класс 5 (Р5) | Низшая, поступательная |
| K | Ролик - ползун | Одноподвижная, класс 4 (Р4) | Высшая |
| L | Ролик – ползун | двухподвижная, класс 4 (Р4) | Высшая |
Число степеней свободы плоского механизма, т. е. число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по формуле Чебышева:
где n= 8 – число подвижных звеньев механизма;
p5= 10 – количество одноподвижных кинематических пар 5-го класса;
p4= 2 – количество двухподвижных кинематических пар 4-го класса.
Лишнюю степень свободы вносит шарнир в ролик. Удалим его. Исчезнет одно звено и одна кинематическая пара.
Заменим высшие кинематические пары на низшие кинематические пары.
Высшая кинематическая пара B заменяется низшими парами В и M.
Высшая кинематическая пара L заменяется низшими парами L и N.
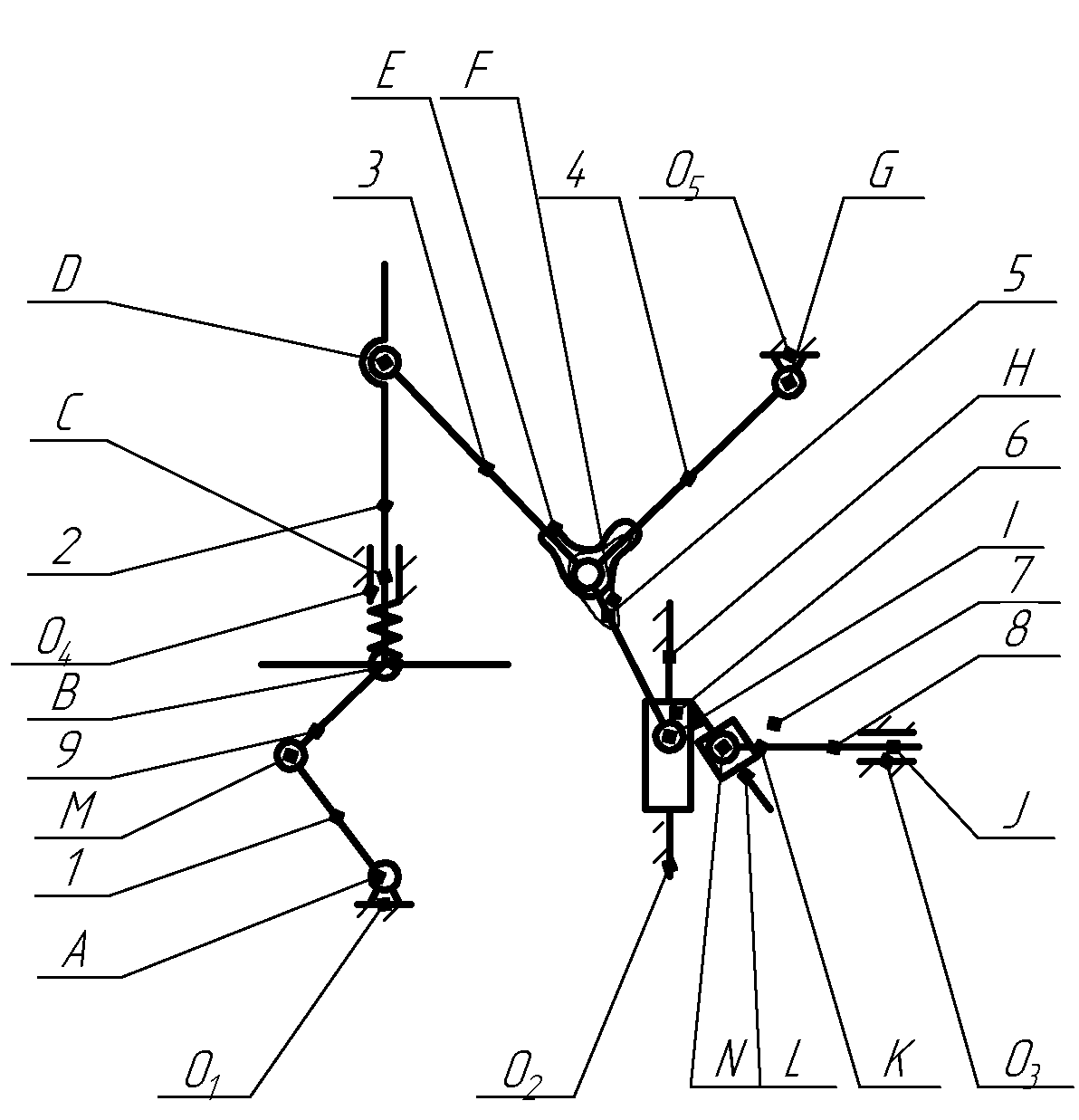
Разложим механизм на группы Ассура и определим их класс и порядок.
Начинаем от наиболее удаленного от начального звена. Отсекая пары от механизма поочереди, в конце получаем только начальное звено. Все группы Ассура 2-го класса, 2-го порядка, начальное звено – первй класс.
Структурная формула образования механизма тогда запишется следующим образом: