ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.10.2023
Просмотров: 32
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
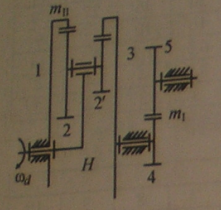
Синтез планетарной передачи:
Дано:
Z4=13
Z5= 26
m1=5
aw=99
i1H3=7
m2=4
Определим число зубьев колёс по формуле:
Заменим неизвестные числа зубьев сомножителями:

Из условия соосности:
Подставляем и получаем:

 ,
,где
 – любое целое число.
– любое целое число.Путём подбора определяем сомножители А, В, С, D:
Отсюда: D=2, B=3, C=1, A=1.
Числа зубьев равны




Выбираем значение
, учитывая следующие условия:число зубьев при внешнем зацеплении
 ;
;число зубьев при внутреннем зацеплении колеса с внешними зубьями
 .
.Получаем следующие числа зубьев при
 для планетарной передачи:
для планетарной передачи:z1=18, z2=54, z
 2=72, z3=144.
2=72, z3=144.
Число сателлитов
 будет
будет 
Для того, чтобы второй сателлит мог быть поставлен на место, которое занимал первый до поворота водила, необходимо чтобы первое колесо повернулось на целое число угловых шагов, что и обеспечивает одинаковое взаимное расположение зубьев центральных колёс z1 и z2, т.е.

Для того, чтобы установить второй сателлит под углом
 к первому, повернём водило на угол
к первому, повернём водило на угол 
где
 - любое целое число.
- любое целое число.При повороте водила на угол
 первое колесо повернётся на угол
первое колесо повернётся на угол
Подставляя (7) и (8) выражения в (9), получаем:
откуда:
 .
. При повороте водила на угол
первое колесо повернётся на угол
Подставляя (7) и (8) выражения в (9), получаем:
откуда:
. Из полученного следует, что если при каком-либо значении
возможно получение целого значения C, то сборка механизма возможна. .
.Таким образом, при k=3условие сборки выполняется.
Условие соседства:

Условие соседства выполняется.
-
Выбираем масштабный коэффициент
m - модуль зацепления;
z1-число зубьев первого колеса;
d1- длина отрезка, изображающего на плане механизма диаметр первого зубчатого колеса.
-

-
-
-
-
-
-
Кинематический анализ механизма графическим методом
Графики линейной скорости
Линия распределения скоростей каждого колеса строится по двум точкам, скорости которых известны. Так для первого звена известны скорость точки B , величина которой задается равным отрезку в 60 мм, и скорость оси вращения колеса равная нулю точка A’. По этим двум точкам строится график распределения окружных скоростей точек водила. Скорость точки C, лежащей на линии касания начальных цилиндров колёс Z1 и Z2 , равна нулю, так как колесо Z1 неподвижно. Проводя прямую через точки B¢¢ и C¢, получим линию 2,2’ , изображающую графики распределения окружных скоростей точек сателлитов Z2 и Z2’ . На этой линии располагается конец отрезка D¢D¢¢ скорости точки D , принадлежащей геометрической оси вращения звеньев Z2 и Z2’, относительно водила. Соединяя точку D¢¢ с точкой A¢ , получаем линию 1,4 графика окружных скоростей планетарного редуктор. На линии 1,4 располагается точка E¢¢ конца отрезка, изображающего окружную скорость точки E , лежащей на линии касания начальных цилиндров зубчатых колес Z4 и Z5. Проводя прямую через точки E¢¢ и F¢ (окружная скорость точки F, лежащей на оси зубчатого колеса Z5 равна нулю) получаем линию 5 графика распределения окружных скоростей точек колеса Z5.
Графики угловой скорости
Построение плана чисел оборотов можно начать с отложения на горизонтальной линии отрезка O1 равного 100 мм. Далее из конца этого отрезка (точка 1) проводим линию параллельную 3 до пересечения ее с вертикальной линией, проведенной из начала отрезка (из точки O). Получим точку пересечения Р, из этой точки проводим линии, параллельные линиям распределения окружных скоростей точек звеньев на графике линейных скоростей.