Файл: Уральский государственный университет путей сообщения.docx
Добавлен: 07.11.2023
Просмотров: 34
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Федеральное агентство железнодорожного транспорта
Федеральное бюджетное образовательное учреждение высшего образования
Уральский государственный университет путей сообщения
Факультет ЭТФ
Кафедра Информационные технологии и защита
информации
Направление
подготовки 09.03.02 Информационные системы и технологии
Отчёт по расчетно-графической работе
По дисциплине «Геоинформационные системы»
Разработал студент
группы ИТ-318 (подпись) (дата сдачи) Петров Д.И.
Проверил
Доцент кафедры (подпись) (дата проверки) Шинкарюк В.А.
Екатеринбург
2021
Содержание
Введение 3
1.Исходные данные 4
2.Дирекционный угол 5
3.Уравнивание горизонтальных углов 8
4.Вычисление дирекционных углов сторон хода 10
5.Вычисление и уравнивание приращений координат 11
6.Вычисление координат точек хода 13
7.Нанесение на план точек теодолитного хода 14
8.Нанесение на план контурных точек, составление и оформление контурного плана 16
Заключение 17
Введение
В данной расчетно-графической работе нам предстоит изучить некоторые термины и понятия из дисциплины «Инженерная геодезия» и понять их. Рассчитать дирекционные углы по уже имеющимися данными и по заданным формулам. Построить теодолитный ход по полученным значениям и начертить сам чертеж (план).
-
Исходные данные
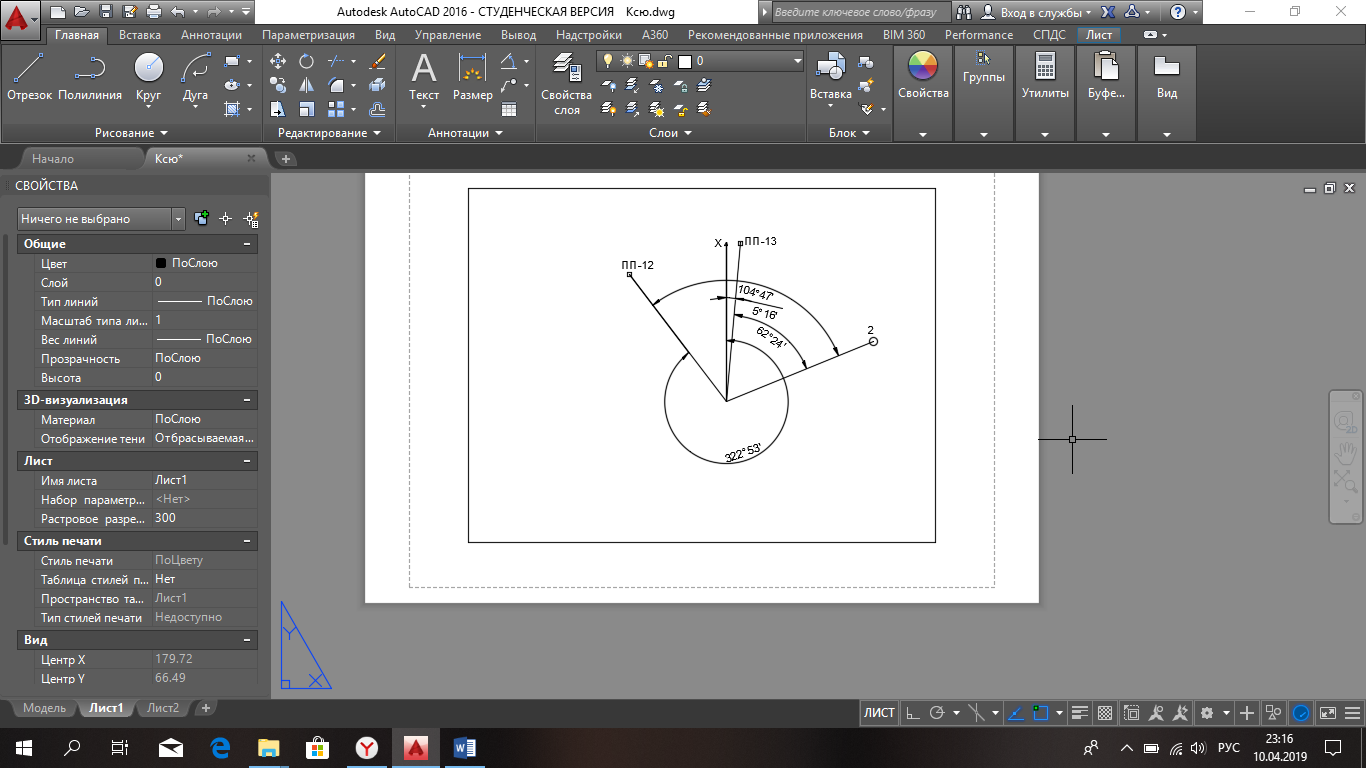
Для вычисления координат точек съемочного обоснования в принятой на объекте системе координат выполнена привязка хода к пунктам геодезической опорной сети – исходными пунктами ПП-11, ПП-12, ПП-13.
Вариант выбирается в соответствии с последними цифрами номера в журнале и фамилии студента.
Общие данные:
-
ПП-11 (исходный пункт) - x11=1000,00 м y11=2200,00 м -
Примычные углы – β1пр= 104°47,7’ β2пр= 62°24,0’
Данные в соответствии с номером в журнале:
-
ПП-12 x12=1255,16 y12=2006,88 -
ПП-13 x13=1353,50 y13=2232,54
-
Дирекционный угол
Ход начинается от исходного пункта ПП-11 (начальный ход теодолитного хода). Для начала построения вычислим значение дирекционного угла начальной стороны хода α
11-2.


Важно заметить, что расхождение между двумя этими значениями не должно превышать 2 минут.
Для начала необходимо вычислить дирекционные углы
 и
и  :
:

Теперь подставим наши значения в формулы для угла
 :
:


Для большей точности возьмем среднее значение:

После проведенных вычислений в AutoCAD произведем построение схемы плановой привязки (рис 1.)
Схема плановой привязки:
При правильном решении во всех вариантах работы минуты в среднем значении дирекционного угла начальной стороны должны получиться равными 10 или 40
Все вычисления заносятся в таблицу 1.
Таблица №1.
Вычисление координат точек точечного обоснования
| № точек | Горизонтальные углы (правые) | Дирекци-онные углы | Горизон-тальные проло-жения, м | Приращения координат, м | Координаты, м | № точек | ||||||
| Измерен. Уравнен. | Вычисленные   | Уравненные   | X | Y | ||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| ПП-11 | | | 67°40,01’ 148°2,71’ | 204,42 226,09 | -6 77,68 -6 -191,83 | +6 189,08 +6 119,66 | 77,62 -191,89 | 189,14 119,72 | 1000,00 | 2200,00 | ПП-11 | |
| 2 | +0,3 99°37,0’ | 99°37,3’ | 1077,62 | 2389,14 | 2 | |||||||
| 3 | +0,3 92°56,5’ | 92°56,8’ | 885,73 | 2508,86 | 3 | |||||||
| 235°5,91’ | 208,19 | -6 -119,12 | +6 -170,74 | -119,18 | -170,68 | |||||||
| 4 | +0,3 114°39,0’ | 114°39,3’ | 766,55 | 2338,18 | 4 | |||||||
| 300°26,61’ | 161,44 | -4 81,80 | +4 -139,18 | 81,76 | -139,14 | |||||||
| 5 | +0,3 120°05,5’ | 120°05,8’ | 848,31 | 2199,04 | 5 | |||||||
| 0°20,81’ | 151,73 | -4 151,73 | +4 0,92 | 151,69 | 0,96 | |||||||
| ПП-11 | +0,3 112°40,5’ | 112°40,8’ | 1000 | 2200 | ПП-11 | |||||||
| 67°40,01’ | | | | | | |||||||
| 2 | | | | | | |||||||
| ∑ | 539°58,5’ | 540°00,0’ | | 952 | 0,26 | -0,26 | 0 | 0 | | | | |
-
Уравнивание горизонтальных углов
Уравнение углов выполняют в графах 2, 3 таблицы 1 в следующем порядке:
-
Вычисляют сумму измеренных углов результат записывают в суммарной строке графы 2.
результат записывают в суммарной строке графы 2.
-
Вычисляют теоретическое значение этой суммы по формуле:
 , где n - число точек хода
, где n - число точек хода-
Вычисляют угловую невязку хода:

-
Вычисляют допустимое значение этой невязки:
-
Сравнивают полученную невязку с допустимой. Если , то невязку распределяют поровну с обратным знаком на все измеренные углы, т.е. вычисляют поправки
, то невязку распределяют поровну с обратным знаком на все измеренные углы, т.е. вычисляют поправки  . Эти поправки, округленные до, выписываются над измерительными углами. Контроль вычисления поправок
. Эти поправки, округленные до, выписываются над измерительными углами. Контроль вычисления поправок  .
.

-
В графе 3 вычисляют уравненные значения углов и их сумму. Сумма уравненных углов должна точно равняться .
.
В заключении имеем следующие вычисления:

-
Вычисление дирекционных углов сторон хода
Дирекционные углы хода вычисляют в графе 4 таблицы 1 по дирекционному углу начальной стороны
 и уравненным значениями горизонтальных углов (правых) по формуле передачи дирекционного угла.
и уравненным значениями горизонтальных углов (правых) по формуле передачи дирекционного угла.
 дирекционный угол последующей стороны ход
дирекционный угол последующей стороны ход
дирекционный угол предыдущей стороны
 правый по ходу горизонтальный угол между этими сторонами
правый по ходу горизонтальный угол между этими сторонами При превышении значения дирекционного угла отметки
 из полученного значения следует вычесть .
из полученного значения следует вычесть .Контроль вычислений:





-
Вычисление и уравнивание приращений координат
Данные вычисления выполняются в графах 6-9 в таблице 1. Приращения координат вычисляются с помощью микрокалькуляторов по формулам:
∆x=d*cosα
∆y=d*sinα
d - горизонтальное проложение хода
α - дирекционный угол той же стороны
Вычисленные значения приращений округляют до 0,01 м и со своими знаками вписываются в 6, 7 графы таблицы 1. В суммарной строке этих графов записывают суммы приращений координат
 ,
,  .
.Отличные вычисленных сумм от нуля есть невязки в приращениях координат ʄx и ʄy :
ʄx=
ʄx=
которые вызваны накоплением погрешностей измерения углов и линий.
Для оценки допустимых координатных невязок ʄx и ʄy вычисляют невязку ʄp в периметре хода и относительную невязку хода
 по формулам:
по формулам: 


В нашем случае мы получаем следующие значения:


Относительную невязку выражают дробью с числителем, равным 1. Сравниваем полученную относительную невязку с допустимым значением. В нашей работе допустимую относительную невязку хода принимаем равной 1/2000. Если относительная невязка допустима, то координатные невязки ʄy и ʄx распределяют с обратным знаком по всем приращениям пропорционально длинам сторон хода di, т.е. вычисляют поправки δx и δy по формулам прямой пропорциональной зависимости:


При вычислении поправок следует помнить, что дробь в формулах – постоянный коэффициент, а в самой поправке будет не более одной значащей цифры. Поправки δx и δy в сантиметрах вписывают над приращениями координат в графах 6 и 7 таблицы 1. Контроль вычисления поправок:


В графах 8 и 9 таблицы 1 вычисляют уравненные значения
 ,
, приращений координат, учитывая знаки приращений и поправок:
приращений координат, учитывая знаки приращений и поправок: 

Контроль вычислений: суммы уравненных приращений координат должны точно равняться нулю, в противном случае нужно перепроверить вычисления.
-
Вычисление координат точек хода
По заданным координатам точки ПП-11 и уравненным приращением координат вычисляют координаты всех точек хода по формулам:


Контроль вычислений: все приращения координат взятых из граф 8 и 9 таблицы 1, получаются снова координаты первой точки.
-
Нанесение на план точек теодолитного хода