Файл: Отчет по лабораторной работе 4 по дисциплине Теория автоматического управления.docx
Добавлен: 07.11.2023
Просмотров: 45
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
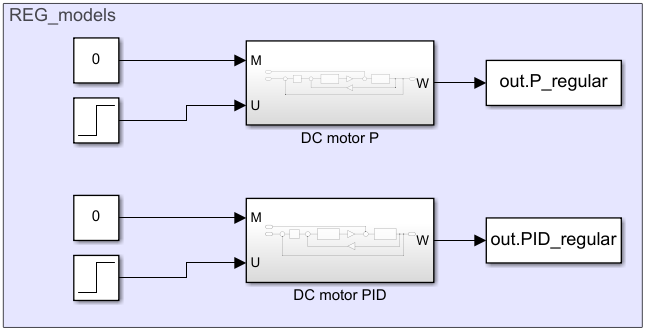
Рисунок 3.2.9 – Simulink-схема САУ скорости с P- и PID-регуляторами с выводом значений в Workspace.
Рисунок 3.2.10 – Результаты моделирования модели с P- и PID-регуляторами.
в) Моделирование следящей САУ с ПД-регулятором по углу по схеме. В качестве задающего воздействия принят угол в 5 градусов.

Рисунок 3.2.11 – Simulink-схема следящей САУ ДПТ с P-регулятором.
Рисунок 3.2.12 – Simulink-схема следящей САУ ДПТ с PD-регулятором.
Рисунок 3.2.13 – Результаты моделирования следящей САУ ДПТ с P- и PD-регуляторами при отсутствии внешнего воздействия (МН = 0).
Рисунок 3.2.14 – Результаты моделирования следящей САУ ДПТ с P- и PD-регуляторами при отсутствии внешнего воздействия (МН = u(t)).
г) Проведение графо-аналитических (структурных) преобразований и получение ПФ рассматриваемой САУ по управлению и возмущению. Решение аналогичной задачи с помощью средства MatLab.
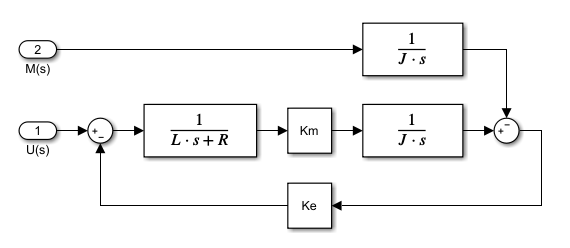
Рисунок 3.2.16 – Перенос сумматора вправо от передаточной функции.
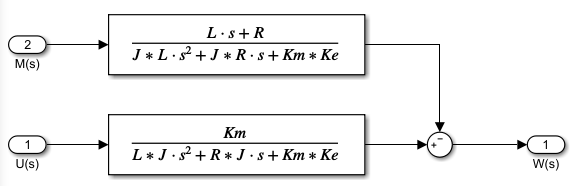
Рисунок 3.2.17 – Произведение последовательных звеньев и звеньев с ОС.

Решение Matlab:
ans =
From input 1 to output:
-7.143 s - 147.1
---------------------
s^2 + 20.59 s + 13.85
From input 2 to output:
40.62
---------------------
s^2 + 20.59 s + 13.85
Continuous-time transfer function.
Вывод: данная лабораторная работа состояла из двух частей. В первой части лабораторной работы были повторены, изучены и закреплены основные сведения о пакете Simulink, исследованы блоки, осуществляющие вывод значений в файлы, в workspace среды Matlab, а также изучены различные блоки библиотек «Sink» и «Source».
Вторая часть лабораторной была посвящёна моделированию САУ ДПТ с использованием знаний, обретённых и/или актуализированных в первой части. В ходе работы проводился анализ САУ ДПТ по угловой скорости, САУ скоростью с П- и ПИД-регуляторами, а также следящей САУ с ПД-регулятором по углу. При анализе внимание уделялось точности регулирования, времени отработки задающего воздействия, определению характера реакции системы на входные воздействия.