ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 92
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Основные понятия и концепции организации ввода / вывода в ОС
Режимы управления вводом / выводом
Закрепление устройств, общие устройства ввода / вывода
Синхронный и асинхронный ввод / вывод
Структура контроллера устройства
Опрос устройств и прерывания. Исключительные ситуации и системные вызовы
Структура системы ввода / вывода
Режимы управления вводом / выводом
Как известно, имеются два основных режима ввода / вывода: режим обмена с опросом готовности устройства ввода / вывода и режим обмена с прерываниями. Рассмотрим рис. 1.
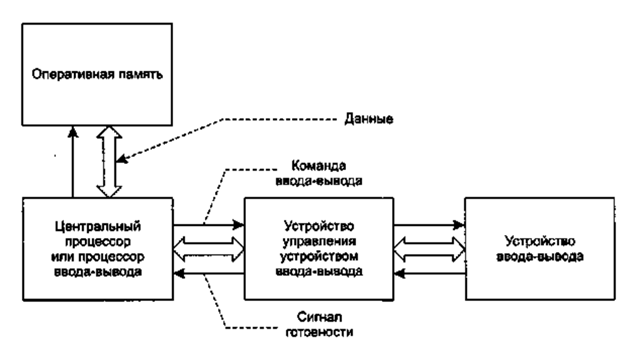
Пусть для простоты управление вводом/выводом осуществляет центральный процессор. Центральный процессор посылает устройству управления команду выполнить некоторое действие устройству ввода / вывода. Последнее исполняет команду, транслируя сигналы, понятные центральному устройству и устройству управления в сигналы, понятные устройству ввода / вывода. Но быстродействие устройства ввода / вывода намного меньше быстродействия центрального процессора (порой на несколько порядков). Поэтому сигнал готовности (транслируемый или генерируемый устройством управления и сигнализирующий процессору о том, что команда ввода / вывода выполнена и можно выдать новую команду для продолжения обмена данными) приходится очень долго ожидать, постоянно опрашивая соответствующую линию интерфейса на наличие или отсутствие нужного сигнала. Посылать новую команду, не дождавшись сигнала готовности, сообщающего об исполнении предыдущей команды, бессмысленно. В режиме опроса готовности драйвер, управляющий процессом обмена данными с внешним устройством, как раз и выполняет в цикле команду «проверить наличие сигнала готовности». До тех пор пока сигнал готовности не появится, драйвер ничего другого не делает. При этом, естественно, нерационально используется время центрального процессора. Гораздо выгоднее, выдав команду ввода / вывода, на время забыть об устройстве ввода / вывода и перейти на выполнение другой программы. А появление сигнала готовности трактовать как запрос на прерывание от устройства ввода / вывода. Именно эти сигналы готовности и являются сигналами запроса на прерывание.
Режим обмена с прерываниями по своей сути является режимом асинхронного управления. Для того, чтобы не потерять связь с устройством (после того как процессор выдал очередную команду по управлению обменом данными и переключился на выполнение других программ), может быть запущен отсчёт времени, в течение которого устройство обязательно должно выполнить команду и выдать сигнал запроса на прерывание.
Максимальный интервал времени, в течение которого устройство ввода / вывода или его контроллер должны выдать сигнал запроса на прерывание, часто называют установкой тайм-аута. Если это время истекло после выдачи устройству очередной команды, а устройство так и не ответило, то делается вывод о том, что связь с устройством потеряна и управлять им больше нет возможности. Пользователь и/или задача получают соответствующее диагностическое сообщение.
Драйверы, работающие в режиме прерываний, представляют собой сложный комплекс программных модулей и могут иметь несколько секций: секцию запуска, одну или несколько секций продолжения и секцию завершения.
Секция запуска инициирует операцию ввода / вывода. Эта секция запускается для включения устройства ввода / вывода либо просто для инициации очередной операции ввода / вывода.
Секция продолжения (их может быть несколько, если алгоритм управления обменом данными сложный и требуется несколько прерываний для выполнения одной логической операции) осуществляет основную работу по передаче данных. Секция продолжения, собственно говоря, и является основным обработчиком прерывания. Используемый интерфейс может потребовать для управления вводом/выводом несколько последовательностей управляющих команд, а сигнал прерывания у устройства, как правило, только один. Поэтому после выполнения очередной секции прерывания супервизор прерываний при следующем сигнале готовности должен передать управление другой секции. Это делается за счёт изменения адреса обработки прерывания после выполнения очередной секции, если же имеется только одна секция прерываний, то она сама передаёт управление тому или иному модулю обработки.
Секция завершения обычно выключает устройство ввода / вывода либо просто завершает операцию.
Управление операциями ввода / вывода в режиме прерываний, требует больших усилий со стороны системных программистов - такие программы создавать сложнее, чем те, что работают в режиме опроса готовности. Примером тому может служить ситуация с драйверами, обеспечивающими печать. Так, в ОС Windows драйвер печати через параллельный порт работает не в режиме с прерываниями, как это сделано в других ОС, а в
режиме опроса готовности, что приводит к 100%-й загрузке центрального процессора на всё время печати. При этом, естественно, выполняются и другие задачи, запущенные на исполнение, но исключительно за счёт того, что ОС Windows реализует вытесняющую мультизадачность и время от времени прерывает процесс управления печатью и передаёт центральный процессор остальным задачам.
Закрепление устройств, общие устройства ввода / вывода
Как известно, многие устройства не допускают совместного использования. Прежде всего, это устройства с последовательным доступом. Такие устройства могут стать закреплёнными, то есть быть предоставленными некоторому вычислительному процессу на всё время жизни этого процесса. Однако это приводит к тому, что вычислительные процессы часто не могут выполняться параллельно - они ожидают освобождения устройств ввода / вывода. Для организации использования многими параллельно выполняющимися задачами устройств ввода / вывода, которые не могут быть разделяемыми, вводится понятие виртуальных устройств. Использование принципа виртуализации позволяет повысить эффективность вычислительной системы.
Вообще говоря, понятие виртуального устройства шире, нежели использование этого термина для обозначения спулинга (SPOOLing - simultaneous peripheral operation on-line, то есть имитация работы с устройством в режиме «он-лайн»). Главная задача спулинга - создать видимость параллельного разделения устройства ввода / вывода с последовательным доступом, которое фактически должно использоваться только монопольно и быть закрепленным. Например, мы уже говорили, что в случае, когда несколько приложений должны выводить на печать результаты своей работы, если разрешить каждому такому приложению печатать строку по первому же требованию, то это приведет к потоку строк, не представляющих никакой ценности. Однако можно каждому вычислительному процессу предоставлять не реальный, а виртуальный принтер и поток выводимых символов (или управляющих кодов для их печати) сначала направлять в специальный файл на магнитном диске. Затем, по окончании виртуальной печати, в соответствии с принятой дисциплиной обслуживания и приоритетами приложений выводить содержимое спул-файла на принтер. Системный процесс, который управляет спул-файлом, называется спулером (spool-reader или spool-writer).
Основные системные таблицы ввода / вывода.
Каждая ОС имеет свои таблицы ввода / вывода, их состав (количество и назначение каждой таблицы) может сильно отличаться. В некоторых ОС вместо таблиц создаются списки, хотя использование статических структур данных для организации ввода / вывода, как правило, приводит к большему быстродействию. Здесь очень трудно вычленить общие составляющие
, тем более что подробной документации на эту тему крайне мало, только если воспользоваться материалами ныне устаревших ОС. Тем не менее, попытаемся это сделать, опираясь на идеи семейства простых, но эффективных ОС реального времени, разработанных фирмой Hewlett-Packard для своих мини-компьютеров.
Исходя из принципа управления вводом/выводом через супервизор ОС и учитывая, что драйверы устройств ввода / вывода используют механизм прерываний для установления обратной связи центральной части с внешними устройствами, можно сделать вывод о необходимости создания, по крайней мере, трёх системных таблиц.
Первая таблица (или список) содержит информацию обо всех устройствах ввода / вывода, подключенных к вычислительной системе. Назовем её условно таблицей оборудования (equipment table), а каждый элемент этой таблицы пусть называется UCB (unit control block, блок управления устройством ввода / вывода). Каждый элемент UCB таблицы оборудования, как правило, содержит следующую информацию об устройстве:
-
тип устройства, его конкретная модель, символическое имя и характеристики устройства; -
как это устройство подключено (через какой интерфейс, к какому разъёму, какие порты и линия запроса прерывания используются и т. д.); -
номер и адрес канала (и подканала), если такие используются для управления устройством; -
указание на драйвер, который должен управлять этим устройством, адрес секции запуска и секции продолжения драйвера; -
информация о том, используется или нет буферирование при обмене данными с этим устройством, «имя» (или просто адрес) буфера, если такой выделяется из системной области памяти; -
установка тайм-аута и ячейки для счетчика тайм-аута; -
состояние устройства; -
поле указателя для связи задач, ожидающих устройство, и, возможно, много ещё каких сведений.
Поясним перечисленное. Поскольку во многих ОС драйверы могут обладать свойством реентерабельности (напомним, это означает, что один и тот же экземпляр программного модуля может обеспечить параллельное обслуживание сразу нескольких однотипных устройств), то в элементе UCB должна храниться либо непосредственно сама информация о текущем состоянии устройства и сами переменные для реентерабельной обработки, либо указание на место, где такая информация может быть найдена. Наконец, важнейшим компонентом элемента таблицы оборудования является указатель на дескриптор той задачи, которая сейчас использует данное устройство. Если устройство свободно, то поле указателя будет иметь нулевое значение. Если же устройство уже занято и рассматриваемый указатель не нулевой, то новые запросы к устройству фиксируются посредством