ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17277
Скачиваний: 51
MICROPHONE DYNAMIC RANGE
The useful dynamic range of a microphone is the interval in decibels
between the 0.5% THD level and the A-weighted noise floor of the micro-
phone. Many studio quality capacitor microphones have total dynamic
ranges as high as 125 or 130, better by a significant amount than that of
a 20-bit digital recording system.
As a matter of quick reference, many microphone specification
sheets present nominal dynamic range ratings based on the difference
between the A-weighted noise floor and a studio reference level of 94 dB
L
P
. Thus, a microphone with a noise floor of 10 dB(A) would carry a
dynamic range rating of 84 dB by this rating method. No new informa-
tion is contained in this rating, and its usefulness derives only from the
fact that 94 dB L
P
represents a normal maximum operating level in a
broadcasting studio. Many manufacturers ignore this rating altogether.
MICROPHONE HUM PICKUP
While all microphones may be susceptible to strong “hum” fields pro-
duced by stray ac magnetic fields at 50 or 60 Hz and its harmonics,
dynamic microphones are especially susceptible because of their con-
struction in which a coil of wire is placed in a magnetic flux reinforcing
iron yoke structure. Examining current microphone literature shows that
there is no universally applied reference flux field for measuring micro-
phone hum pickup. Several magnetic flux field reference standards may
be found in current literature, including: 1 oersted, 10 oersteds, and
1 milligauss. The choice of units themselves indicates a degree of confusion
between magnetic induction and magnetic intensity. The specification of
hum pickup is rarely given today, perhaps due to the use of hum-bucking
coils and better shielding in the design of dynamic microphones, as well
as the general move away from tube electronics and associated power
supplies with their high stray magnetic fields.
RECIPROCITY CALIBRATION OF PRESSURE
MICROPHONES
Pressure microphones are primarily calibrated in the laboratory using the
reciprocity principle. Here, use is made of the bilateral capability of the
capacitor element to act as either a sending transducer or a receiving
transducer, with equal efficiency in both directions. The general process
is shown in Figure 7–9.
At A, an unknown microphone and a bilateral microphone are
mounted in an assembly and jointly excited by a third transducer of
unknown characteristics. From this measurement set we can obtain only
the ratio of the sensitivities of the bilateral and unknown microphones.
7: Microphone Measurements, Standards and Specifications
113
Earg_07.qxd 14/9/04 2:43 PM Page 113
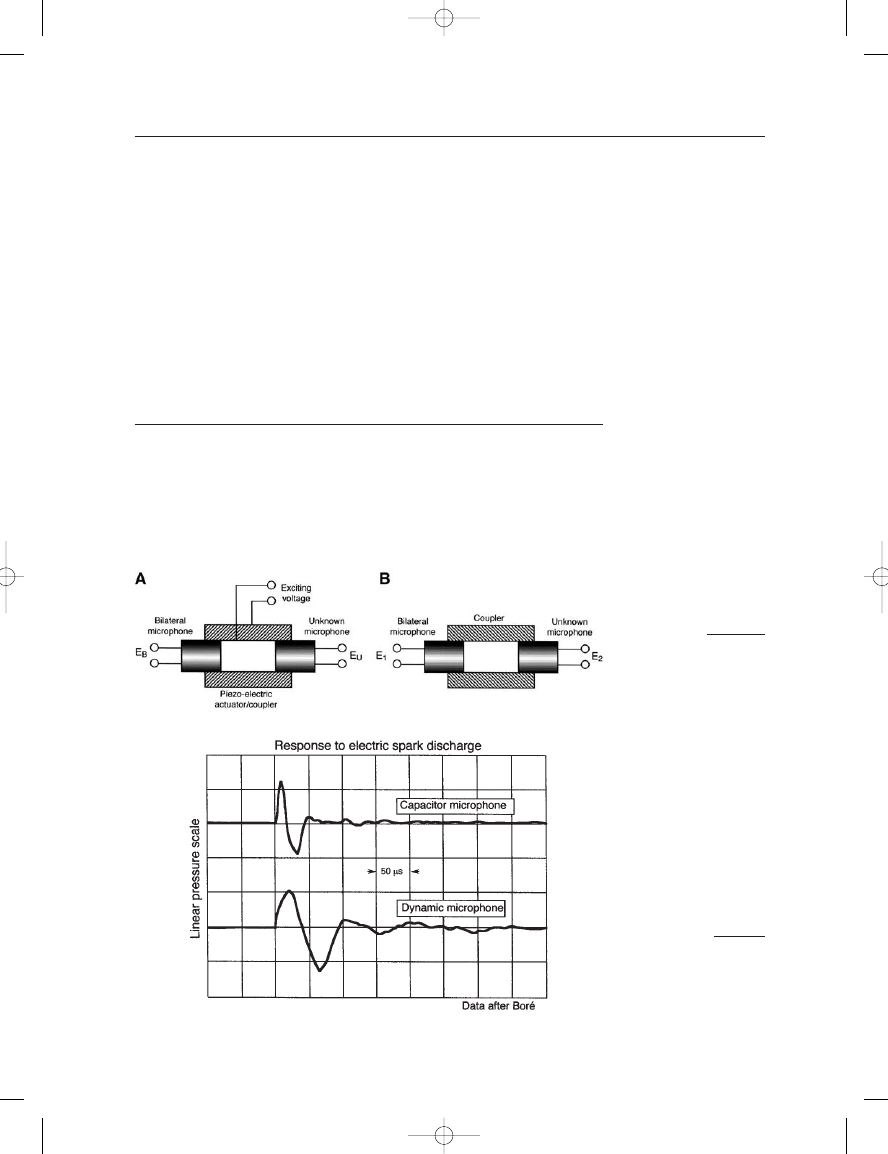
The next step, shown at B, is to measure the output of the unknown
microphone by driving it with the bilateral microphone, acting as a small
loudspeaker. In this step we can determine the product of the two sensi-
tivities, taking into account the electrical and acoustical equivalent cir-
cuits. The sensitivity of either microphone can then be determined by
algebraic manipulation of the ratio and product of the sensitivities, taken
on a frequency by frequency basis. As a secondary standard for micro-
phone level calibration a pistonphone is normally used. The pistonphone
is a mechanical actuator that can be tightly coupled to the capsule assem-
bly of a pressure microphone and produces a tone of fixed frequency and
pressure amplitude. Those interested in further details of microphone
calibration are referred to Wong and Embleton (1995).
IMPULSE RESPONSE OF MICROPHONES
The impulse response of microphones is rarely shown in the literature
because of the difficulties in achieving a consistent impulse source and
interpreting the results. Usually, a spark gap discharge is used, but it has
been shown that at high frequencies the spectrum is not consistent.
Actually, the best results over the normal audio passband may be
obtained using special loudspeaker mechanisms. Figure 7–10 shows the
THE MICROPHONE BOOK
114
FIGURE 7–9
The reciprocity process;
determining the ratio
(A) and product (B) of
microphone sensitivities.
FIGURE 7–10
Impulse responses (spark
gap) of capacitor and
dynamic microphones.
(Figure after Boré, 1989.)
Earg_07.qxd 14/9/04 2:44 PM Page 114
spark gap response of both a capacitor and a dynamic microphone, and
it can clearly be seen that the capacitor is better behaved in its time
domain response.
Given future standardization of an adequate generating source, impulse
response may become an important microphone specification, inasmuch as
it presents more information regarding HF behavior of the microphone than
is given by the traditional frequency response amplitude curve.
7: Microphone Measurements, Standards and Specifications
115
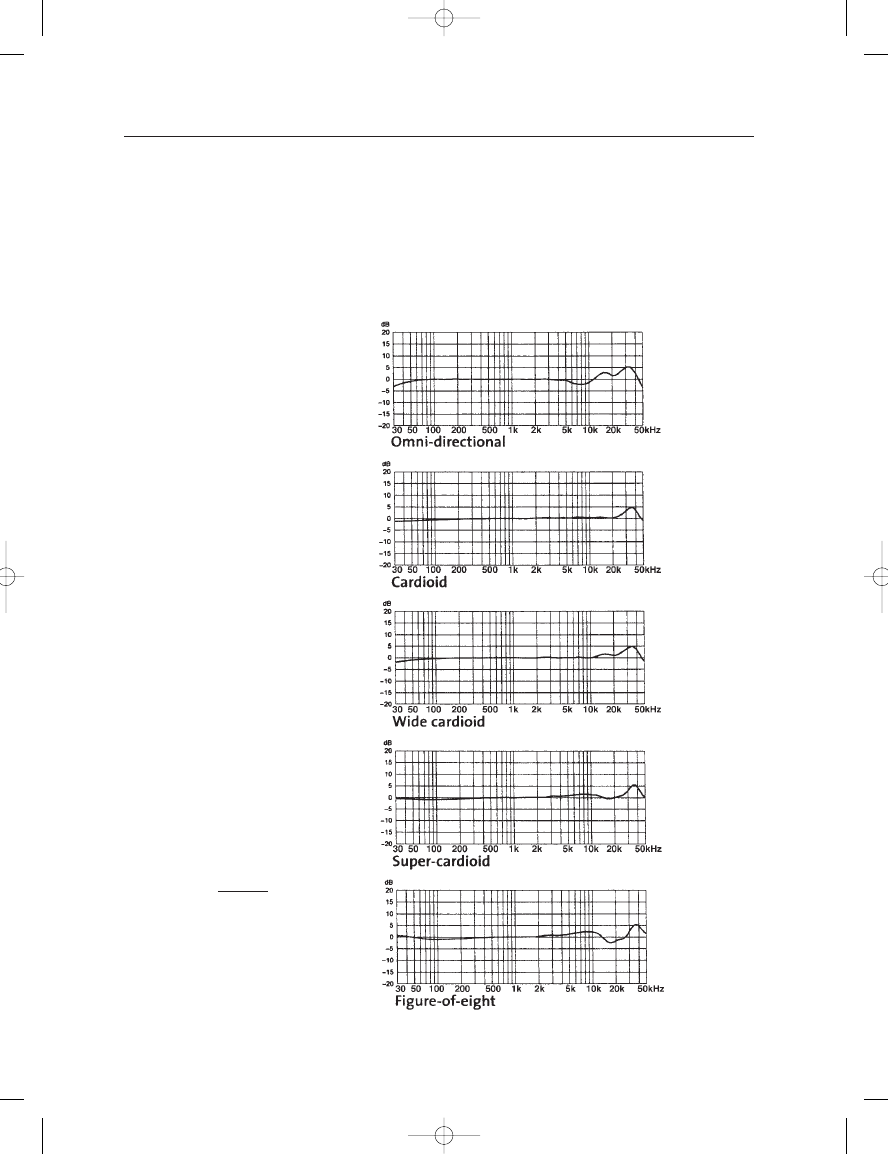
FIGURE 7–11
On-axis frequency
response of Sennheiser
model MKH800
microphone for five
directional settings. (Figure
courtesy of Sennheiser
Electronics.)
Earg_07.qxd 14/9/04 2:44 PM Page 115
EXTENDING THE MICROPHONE FREQUENCY
RESPONSE ENVELOPE
As higher sampling rates have been introduced into modern digital
recording, the need for microphones with extended on-axis frequency
response capability has increased. Figure 7–11 presents on-axis response
curves for the Sennheiser multipattern model MKH800 microphone
showing response out to 50 kHz – an example of what can be accom-
modated through careful design and amplitude equalization.
STANDARDS
The primary source of microphone standards for normal audio engineering
applications is the International Electrotechnical Commission (IEC). IEC
document 268-4 (1972) specifically lists the characteristics of micro-
phones to be included in specification literature, along with methods for
performing the measurements. IEC document 327 (1971) specifically
covers reciprocity calibration of 1-inch pressure microphones.
In addition, many countries have their own standards generating
groups which in many cases adopt IEC standards, often issuing them
under their own publication numbers. See Gayford (1994, Chapter 10) for
additional discussion of microphone standards.
As the new century gets under way we are seeing microphone stand-
ards working groups focus attention on matters of time-domain per-
formance along with greater resolution and detail in presenting off-axis
coverage. The attempt here is to define, far better than before, those sub-
jective aspects that characterize microphone performance in real-world
environments and applications. We eagerly await the outcome of these
activities.
THE MICROPHONE BOOK
116
Earg_07.qxd 14/9/04 2:44 PM Page 116
C
H
A
P
T
E
R
8
ELECTRICAL CONSIDERATIONS
AND ELECTRONIC INTERFACE
INTRODUCTION
In this chapter we examine details of electronic performance of
microphones and their interface with the following preamplifiers and
consoles. Subjects to be covered include: remote powering, microphone
output/preamp input circuitry, the stand-alone microphone preamp,
microphone cable characteristics and interference, and overall system
considerations. A final section deals with capacitor microphones operating
on the radio frequency (RF) transmission principle.
POWERING
Most modern capacitor microphones operate on 48 V phantom powering
(also known as “simplex” powering) provided by the preamplifier or con-
sole input module. The basic circuitry for phantom powering is shown in
Figure 8–1. Here, a master 48 V dc supply provides positive voltage to
pins 2 and 3 through a pair of 6800 ohm resistors, while a ground return
path is provided through pin 1. The signal is carried on pins 2 and 3 and
is unaffected by the presence of identical dc voltages on pins 2 and 3.
Today, pin 2 is universally designated as the “hot” lead; that is, a positive-
going acoustical signal at the microphone will produce a positive-going
voltage at pin 2. Pin 1 provides both the dc ground return path for
phantom powering as well as the shield for the signal pair.
The circuit normally used with a transformerless microphone for
receiving power from the source is shown in Figure 8–2A. Here, a split
resistor combination is tapped for positive dc voltage which, along with
the ground return at pin 1, is delivered to the microphone’s electronics
and to the capsule for polarizing purposes.
Earg_08.qxd 14/9/04 2:45 PM Page 117