ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17273
Скачиваний: 51
CALCULATION OF DIRECTIVITY DATA FROM
PATTERNS GIVEN IN POLAR
COORDINATES
The RE (random efficiency) of a microphone whose polar pattern is
symmetrical about its principal axis is given by:
(6.4)
where
is the response angle in radians and f() is the response value ()
at angle
. If f() can be described by cosine relationships (as most stand-
ard patterns can), equation (6.4) leads to a definite integral that can be
easily solved.
RE
1
2
0
sin
[f()]
2
d
6: High Directionality Microphones
103
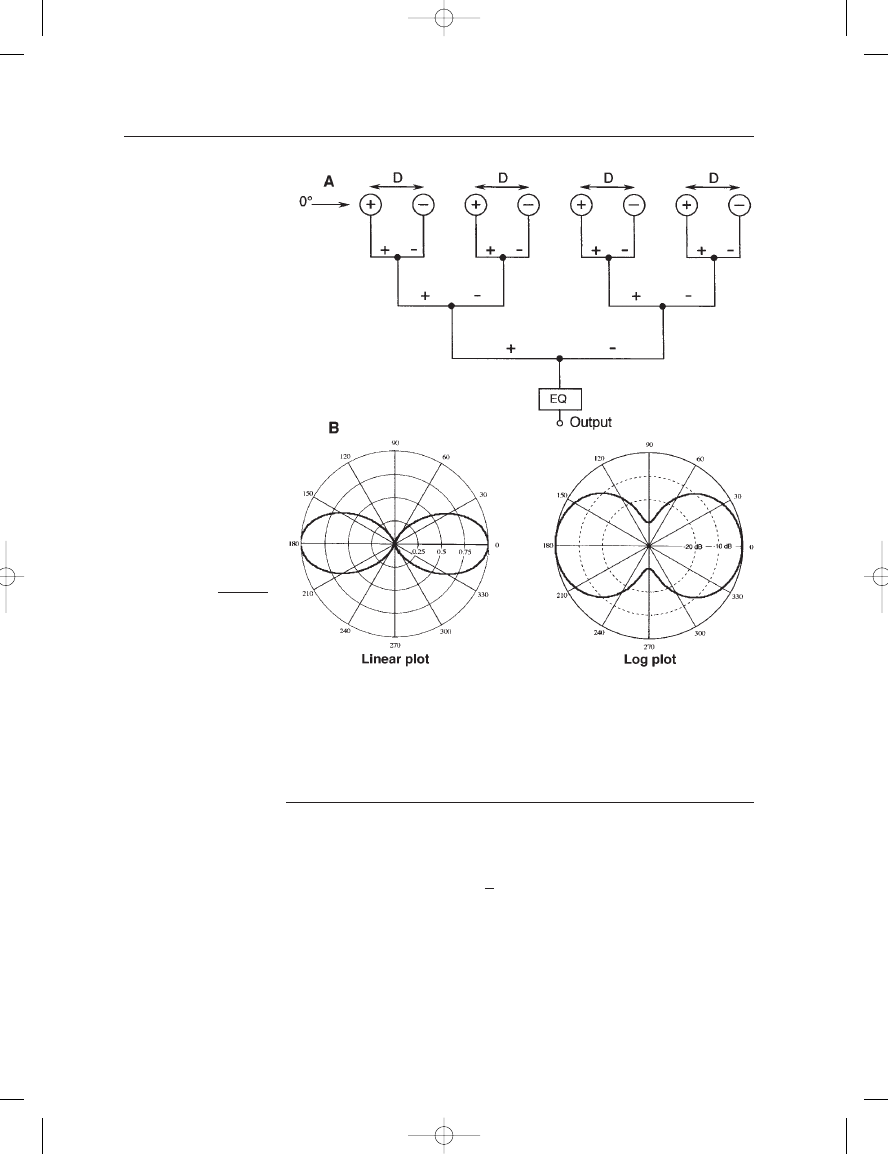
FIGURE 6–14
Details of a third-order
microphone; physical circuit
(A), polar response, both
linear and log, (B).
Earg_06.qxd 14/9/04 2:43 PM Page 103
Data for several orders of microphone patterns are given in the
Table 6–1.
The relationships among RE, DF, and DI are:
DF
1/RE
(6.5)
DI
10 log DF dB
(6.6)
THE MICROPHONE BOOK
104
TABLE 6–1
Microphone directivity data in tabular form (orders 0 through 4)
Pattern Equation
Random
Directivity
Directivity
Efficiency (RE)
Factor (DF)
Index (DI)
1 (omni)
1
1
0 dB
cos (figure-8)
0.33
3
4.8
cos
2
(2nd order figure-8)
0.20
5
7.0
cos
3
(3rd order figure-8)
0.14
7
8.5
cos
4
(4th order figure-8)
0.11
9
9.5
0.5 0.5 cos (cardioid)
0.33
3
4.8
0.25 0.75 cos
0.25
4
6.0
(hypercardioid)
(0.5 0.5 cos )cos
0.13
7.5
8.8
(2nd order cardioid)
(0.5 0.5 cos )cos
2
0.086
11.6
10.6
(3rd order cardioid)
(0.5 0.5 cos )cos
3
0.064
15.7
12.0
(4th order cardioid)
Data from Olson, 1972
Earg_06.qxd 14/9/04 2:43 PM Page 104
C
H
A
P
T
E
R
7
MICROPHONE
MEASUREMENTS, STANDARDS
AND SPECIFICATIONS
INTRODUCTION
In this chapter we discuss the performance parameters of microphones
that form the basis of specification documents and other microphone
literature. While some microphone standards are applied globally, others
are not, and this often makes it difficult to compare similar models from
different manufacturers. Some of the differences are regional and reflect
early design practice and usage. Specifically European manufacturers
developed specifications based on modern recording and broadcast prac-
tice using capacitor microphones, whereas traditional American practice
was based largely on standards developed in the early days of ribbon
and dynamic microphones designed originally for the US broadcasting
industry. Those readers who have a special interest in making micro-
phone measurements are referred to the standards documents listed in
the bibliography.
PRIMARY PERFORMANCE SPECIFICATIONS
1. Directional properties: Data may be given in polar form or as a set
of on- and off-axis normalized frequency response measurements.
2. Frequency response measurements: Normally presented along the
principal (0
) axis as well as along 90 and other reference axes.
3. Output sensitivity: Often stated at 1 kHz and measured in the free
field. Close-talking and boundary layer microphones need addi-
tional qualification. Some manufacturers specify a load on the
microphone’s output.
4. Output source impedance.
Earg_07.qxd 14/9/04 2:43 PM Page 105
5. Equivalent self-noise level.
6. Maximum operating sound pressure level for a stated percentage of
total harmonic distortion (THD).
Additionally, a complete listing of mechanical and physical characteristics
and any switchable performance features built into the microphone are
described in this chapter.
FREQUENCY RESPONSE AND POLAR DATA
Frequency response data should always state the physical measuring
distance so that an assessment of proximity effect in directional micro-
phones can be correctly made. If no reference is made, it can be assumed
that measurements are made at 1 meter. Data for professional micro-
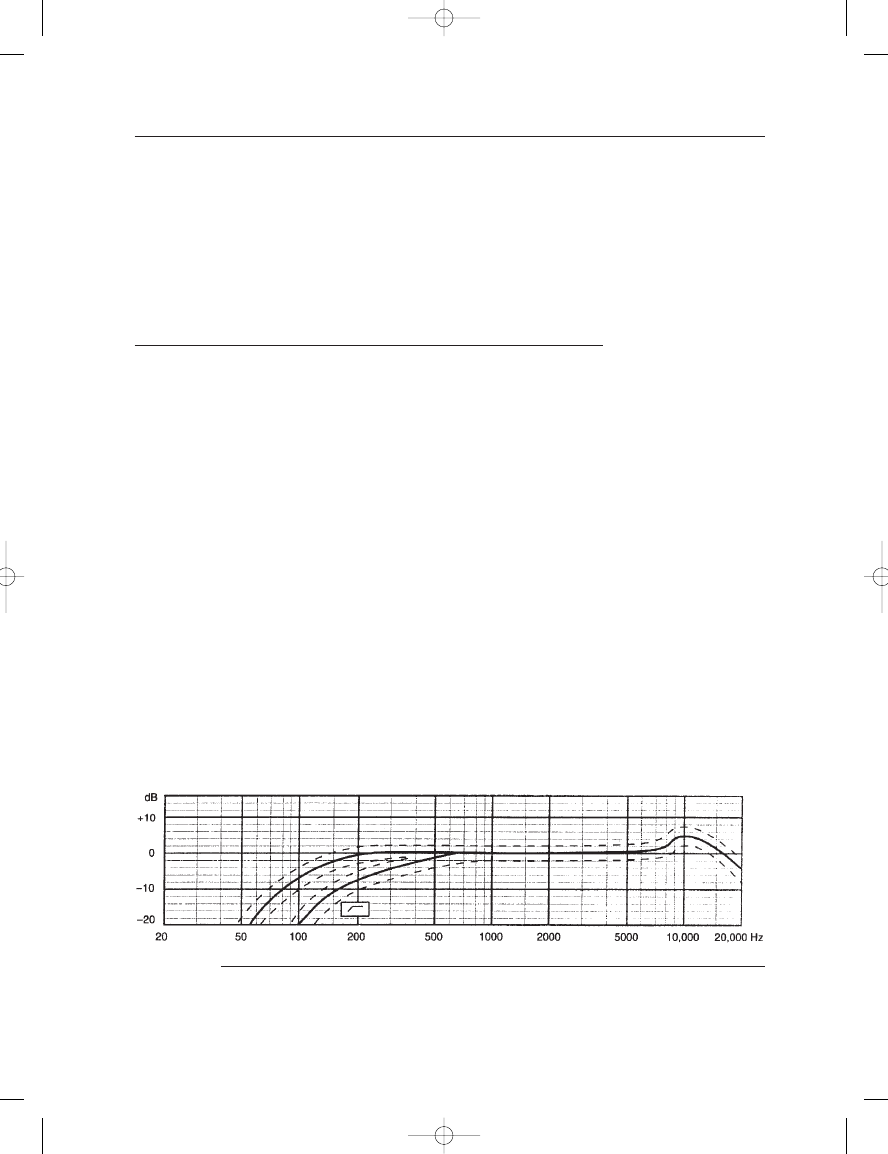
phones may be presented with tolerance limits, as shown in Figure 7–1.
Here, the data indicate that the microphone’s response falls within a
range of
2 dB above about 200 Hz (slightly greater below that fre-
quency); however, there is no indication of the actual response of a sample
microphone.
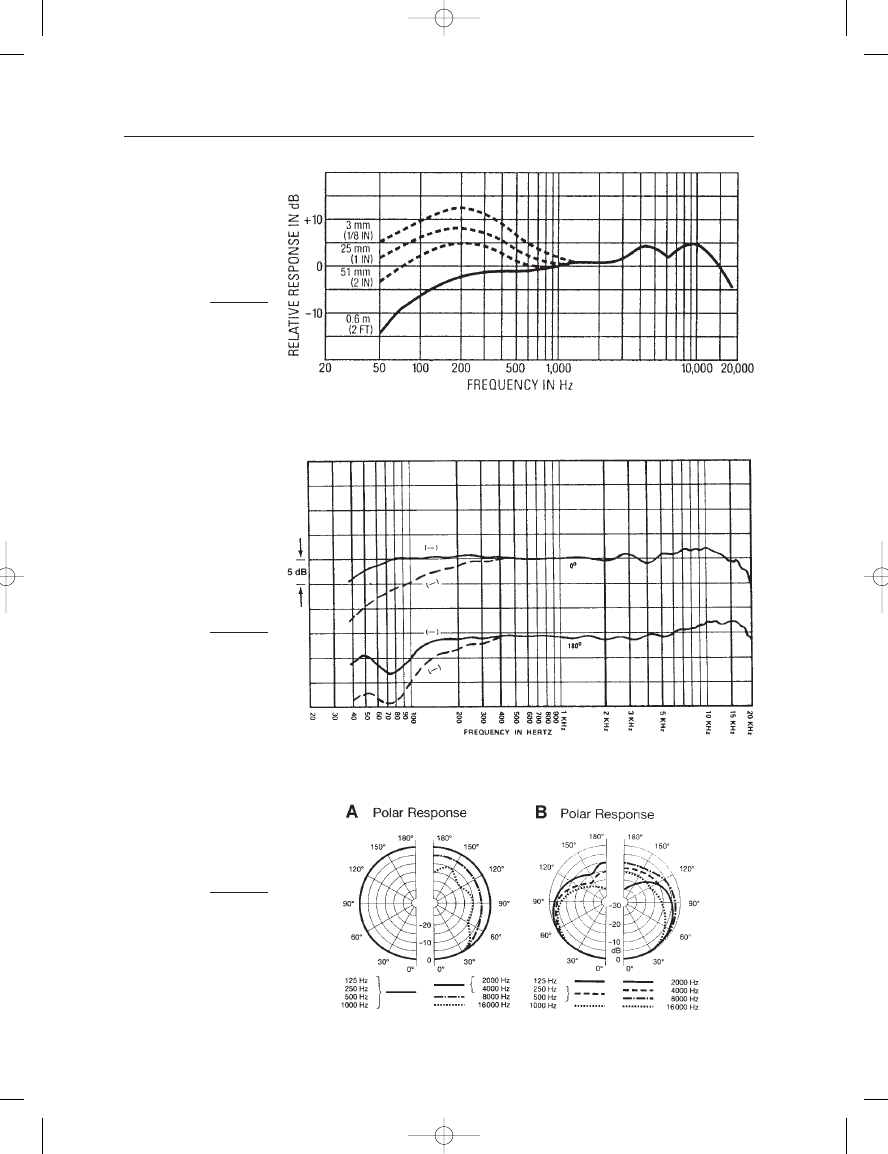
If the data can be presented with clarity, some manufacturers will
show proximity effects at distances other than the reference one meter,
as shown in Figure 7–2. This data is especially useful for vocal micro-
phones that are intended for close-in applications.
Many manufacturers show response at two or more bearing angles
so that the variation in response for those off-axis angles can be clearly
seen, as shown in Figure 7–3. Here, the response for a cardioid is shown
on-axis and at the nominal null response angle of 180
. For supercar-
dioid and hypercardioid microphones, the response at the null angles of
110
and 135 may also be shown.
Taking advantage of normal microphone symmetry, polar plots may
be restricted to hemispherical representation, as shown in Figure 7–4.
For microphones that are end-addressed, it is clear that response will be
THE MICROPHONE BOOK
106
FIGURE 7–1
Amplitude response versus frequency with upper and lower limits for a capacitor vocal microphone; effect of LF cut is
also shown. (Figure courtesy of Neumann/USA.)
Earg_07.qxd 14/9/04 2:43 PM Page 106
7: Microphone Measurements, Standards and Specifications
107
FIGURE 7–2
Proximity effect for a
dynamic vocal microphone
shown at several working
distances. (Figure courtesy of
Shure Inc.)
FIGURE 7–3
Amplitude response shown
at reference angles of 0
and 180
for a Variable-D
dynamic microphone.
(Figure courtesy of
Electro-Voice.)
FIGURE 7–4
Microphone polar groups,
hemispherical only, for
omni capacitor (A) and
cardioid capacitor
microphones (B).
(Figure courtesy of AKG
Acoustics.)
Earg_07.qxd 14/9/04 2:43 PM Page 107