ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 18.12.2021
Просмотров: 710
Скачиваний: 3
Основи біофізики і біомеханіки
159
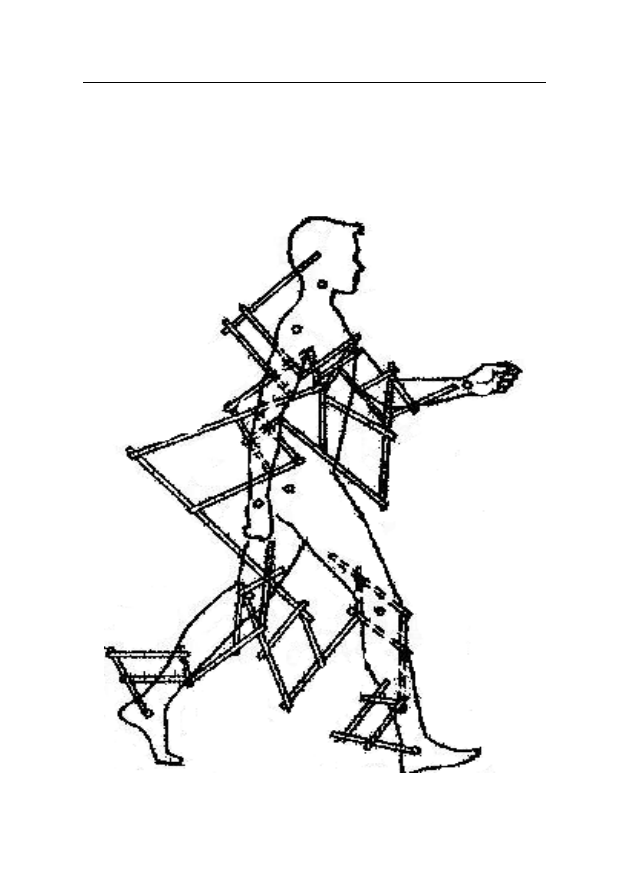
модель тіла –
б і о м е х а н і ч н у с и с т е м у
. Біомеханічна система
має основні властивості, які є істотними для виконання рухової функції, і
не включає в себе поодинокі окремі деталі. Біомеханічна система – це
спрощена копія, модель тіла людини, на якій можна вивчати
закономірності рухів (
рис. 7.2.1
). Існують моделі: Фішера, Абалакова.
Рис. 7.2.1.
Модель Фішера дослідження рухів людини
Л. І. Григор’єва, Ю. А. Томілін
160
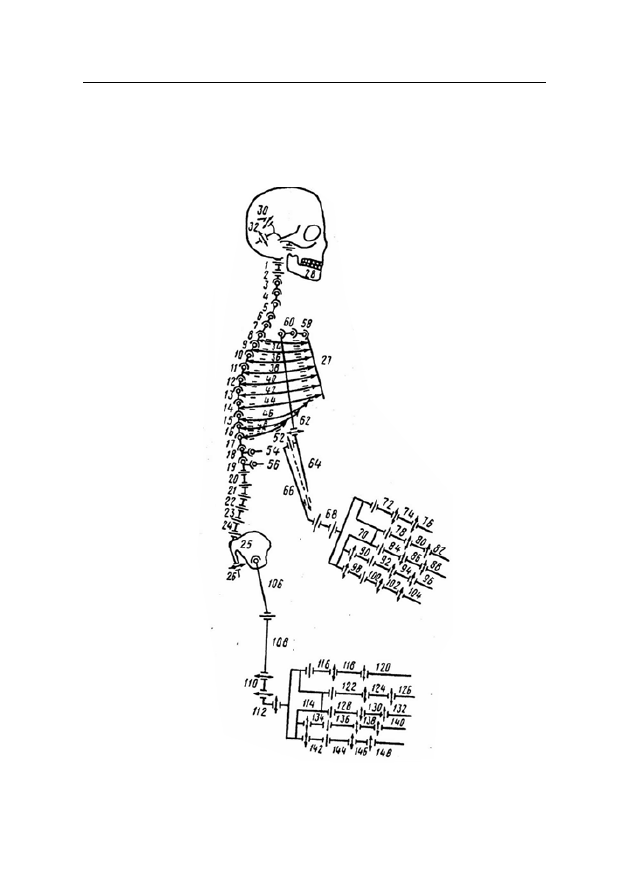
Б і о м е х а н і ч н а с и с т е м а –
це сукупність живих об’єктів
(органів, тканин), які характеризуються загальними особливостями
при проявах законів механічного руху, а також загальними
особливостями способів управління ними, участі в цих рухах або в їх
використанні.
Рис. 7.2.2.
Структурна схема опорно-рухового апарату людини
(за А. Morecrietal, 1981)

Основи біофізики і біомеханіки
161
Складовими частинами біомеханічної системи є
б і о к і н е -
м а т и ч н і л а н ц ю г и
– ланцюги між багатьма частинами тіла,
що рухомо з’єднані. До цих ланцюгів прикладаються сили
(навантаження), які викликають деформацію і зміну рухів.
Біокінематичний ланцюг – це послідовне з’єднання ряду біокіне-
матичних пар.
Б і о к і н е м а т и ч н а п а р а
– це рухоме (кінематичне)
сполучення двох кісткових механізмів, у якому можливості рухів
визначаються будовою цього з’єднання і управляючим впливом м’язів.
У біокінематичних парах рухового апарату людини з’єднання двох
ланок здійснюються таким чином, щоб створити лише наперед задані
(визначені) рухи. Це забезпечується
с т у п е н я м и в і л ь н о с т і
окремих ланок і організму в цілому, що і визначає направленість руху.
Суттєвим є те, що кількість з’єднань ланок і кількість ступеней
вільності живого організму набагато перевищує те, з чим має справу
теорія механізмів і машин (тобто є більшою, ніж 1).
§ 7.3. СТУПЕНІ ВІЛЬНОСТІ В БІОКІНЕМАТИЧНИХ
ЛАНЦЮГАХ
Кожна біокінематична пара володіє тією чи іншою кількістю ступеней
вільності, що і визначає рухові можливості організму. Взагалі, число
ступеней вільності ланки відповідає кількості її незалежних переміщень
(лінійних та кутових).
З курсу механіки відомо, якщо на фізичне тіло не накладається
ніяких обмежень (в’язів), то воно може рухатися в напрямку усіх трьох
взаємно перпендикулярних осей поступально. Тому таке тіло має
6 ступеней вільності.
Кожен зв’язок, що накладається, зменшує кількість ступеней
вільності:
–
зафіксувавши одну точку вільного тіла зразу відбирають у
нього 3 ступені вільності (можливих лінійних переміщень відносно
основних трьох координатних осей);
приклад
: шароподібний суглоб, у
якому зменшилася кількість ступеней вільності до трьох;
–
закріплення двох точок тіла відповідає фіксації його на осі, що
проходить крізь ці точки – залишається одна ступінь вільності;
–
закріплення трьох точок повністю відбирає у тіла можливість
руху; тому таке з’єднання до суглобів не відноситься.
До суглобів з
трьома ступенями
вільності відносяться шароподібні
суглоби, де можливі рухи у наступних напрямках: поворот; приведення і
Л. І. Григор’єва, Ю. А. Томілін
162
відведення у фронтальній площині; згинання та розгинання. Такими
суглобами є: плечовий, тазостегновий.
До суглобів з
двома ступенями
вільності відносяться: колінний
суглоб (який припускає згинання і розгинання, а також деякий поворот
голені відносно стегна), зап’ястно-п’ясний суглоб великого пальця
кисті руки і деякі інші.
Суглобами з
одним ступенем
вільності є плече, ліктьовий,
міжфалангові суглоби пальців, сочленіння стопи з великою берцовою
кісткою.
Кількість ступеней вільності кінематичного ланцюгу опорно-рухової
системи людини дорівнює числу незалежних джерел енергії, необхідних
для приведення у рух тієї чи іншої ланки відносно відповідної осі
обертання суглобу
.
Розрахунок числа ступеней вільності кінематичного ланцюгу
проводиться за наступною формулою:
i
i
P
i
n
N
.
6
, де:
N
– число
ступеней вільності,
n
– кількість рухомих ланок кінематичного
ланцюга,
i
– число обмежень ступеней вільності в з’єднаннях –
суглобах,
Р
і
– число з’єднань з
i
-обмеженнями, при цьому:
i
P = n-1.
Загальна кількість ступеней вільності тіла людини складає близько:
6*144-5*81-4*33-3*29=240, але з повною достовірністю точна
кількість невідома.
Число ступеней вільності, наприклад, руки, можна розрахувати за
цією залежністю:
n = 18,
f = 27,
n
(
) = 35, Р
і
= 1
(знак
означає суму за усіма
змінними).
Для відкритого біокінематичного ланцюга отримаємо:
N =
f = 27.
У цій залежності
n
характеризує число рухомих сегментів: плече,
передпліччя, зап’ястя, 1-5-п’ясні кістки, проксимальні та дистальні
фаланги пальців кисті,
f
– число ступенів вільності біокінематичних
пар;
n
(
)
– число сегментів, які мають
з’єднань: плече має 2 суглоби;
передпліччя, 1-5-п’ясні кістки і проксимальні фаланги пальців – також
по 2. Дистальні фаланги пальців мають по 1 суглобу. Зап’ястя має
6 суглобів (променеве зап’ястний, зап’ясно-п’ясний 1-го і п’ясно-
фалангові 2-5-го пальців).
Найсуттєвішим є те, що майже в усіх суглобах ступеней вільності
більше, ніж у механізмах (тобто більше, ніж 1).
З одного боку, устрій пасивного апарату людини (кістки, суглоби)
створює невизначеність руху, а з іншого м’язи (їх управляючі рухи)
Основи біофізики і біомеханіки
163
накладають додаткові
с т у п е н і
з в ’ я з к у
і залишають
необхідну кількість ступеней вільності. Так і забезпечується необхідна
можливість рухів. Таким чином, м’язи – це той апарат, що забезпечує
управління рухами і спрямовує рух у наперед заданому напрямку.
Крім того, своєрідність процесів управління рухами людини зумовлена
також особливостями м’язової системи, як системи двигунів, що
перемагають зайві ступені вільності.
Зрозуміло, що нервово-м’язове управління рухами, яке полягає в
зменшенні цих ступенів вільності, сильно відрізняється від систем
управління у техніці.
Розрізняють
замкнені та незамкнені біокінематичні ланцюги
. У
незамкнених
ланцюгах є остання («вільна») ланка, котра входить до
складу лише однієї пари; у цих ланцюгах немає вільної кінцевої ланки,
кожна ланка входить у дві пари. У незамкненому ланцюзі можливі
ізольовані рухи у кожному окремо взятому суглобі. При цьому
можливість ізольованого руху не виключається будовою незамкнутого
ланцюга, бо рухи біокінематичних ланцюгів у рухових діях зазвичай
відбуваються одночасно у багатьох суглобах. У
замкненому
ланцюзі
ізольовані рухи в одному суглобі неможливі, бо обов’язково при цьому
у рух залучаються й інші з’єднання.
Незамкнений ланцюг може стати замкненим, якщо вільна кінцева
ланка отримає зв’язок (опору, захват) з іншою ланкою ланцюга чи
безпосередньо, чи через будь-яке тіло. Наприклад, вільна кінцівка
(руки, ноги) являють собою незамкнений ланцюг. Дві ноги через таз є
замкненим ланцюгом через опору. Постійно замкнений ланцюг:
грудина-ребро-хребет-ребро-грудина. Дві ноги можуть замкнути
ланцюг через опору, наприклад, у положенні випаду.
Ці взаємозв’язки у біокінематичному ланцюгу обов’язково
потрібно враховувати при аналізі роботи м’язів, при оцінці їх
напруженості, спроможності до скорочення. Замкнений ланцюг може
розімкнутися, а через це – і змінити свої можливості (наприклад, при
переході ноги зі стану випаду до звичайного стану). Постійно замкнені
системи тут не розглядаються. Завдяки переходу ланцюгів із
замкненого стану в незамкнений і здійснюється рух людини.
Значна частина незамкнених біокінематичних ланцюгів оснащена
багатосуглобними м’язами. Тому рухи в одних суглобах через такі
м’язи більш чи менш пов’язані з рухами в сусідніх суглобах. Однак
при точному управлінні в багатьох випадках цей взаємний зв’язок
можна виключити, перебороти. В замкнених ланцюгах такий зв’язок є
непереборним, і дії м’язів передаються на віддалені суглоби. Так, при