Файл: Разработка радиолокационной станции со сложным сигналом.docx
Добавлен: 10.11.2023
Просмотров: 119
Скачиваний: 10
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 должно быть:
должно быть: 
 с
сТак же необходимо учитывать, что если время контакта с целью больше, чем время нахождения цели в элементе разрешения по дальности, то разрешение по скорости будет определяться последним. Это происходит из-за того, накопление сигнала происходит отдельно в каждом дальностном канале. Таким образом, время контакта для скоростных целей не будет превышать:


 – удовлетворяет условию
– удовлетворяет условию3. РАСЧЕТ ИМПУЛЬСНОЙ МОЩНОСТИ ПЕРЕДАТЧИКА
При проектировании приемопередающего тракта и устройства обработки сигнала следует определить необходимые вероятности правильного обнаружения и ложной тревоги при однократном просмотре пространства.
Вероятность ложной тревоги может быть оценена по частоте появления помехи, которая равна отношению количества ложных отметок к числу испытаний, то есть к количеству пространственно-скоростных каналов за обзор:

Оценим суммарное число пространственно-скоростных каналов.
Число каналов по дальности равно

 = 9999
= 9999Число каналов по азимуту


где
 - угол, на который повернется антенна за время равное длительности сигнала. Число каналов по скорости
- угол, на который повернется антенна за время равное длительности сигнала. Число каналов по скорости 

Суммарное число каналов равно произведению каналов по дальности, углу и скорости, так как каждому азимутальному каналу соответствует
 каналов по дальности, а каждому дальностному каналу
каналов по дальности, а каждому дальностному каналу 
каналов по скорости:


Коэффициент направленного действия (КНД) D передающей антенны характеризует степень концентрации излученной мощности в направлении, задаваемым углом возвышения (углом места) и азимутальным углом и численно равен отношению квадрата модуля полного вектора напряженности поля, создаваемого антенной в данном направлении, к среднему по всем направлениям значению квадрата модуля напряженности поля. В рамках курсового проекта будем рассматривать КНД антенны в узком смысле, как его максимальное значение, достигающееся в направлении оси визирования антенны. Для его расчета можно применять приближенную формулу, связывающую КНД и ширину диаграммы направленности антенны:

где
 и
и  – соответствующие значения ширины ДНА по уровню 0,5 в азимутальной и угломестной плоскости, выраженные в градусах.
– соответствующие значения ширины ДНА по уровню 0,5 в азимутальной и угломестной плоскости, выраженные в градусах.В качестве эталонной антенны обычно принимается эталонный вибратор, находящийся в свободном пространстве, направление максимума излучения которого совпадает с направлением в точку приема. В этом случае:
 =
= 
По заданным вероятностям ложной тревоги и правильного обнаружения определим соотношение сигнал/(шум+помеха) на выходе устройства обработки перед пороговой схемой
Мощность шумов на входе приемника в полосе приема определяется по формуле

где:
 – коэффициент шума приемника;
– коэффициент шума приемника;
 – постоянная Больцмана;
– постоянная Больцмана; К – абсолютная температура входного усилителя;
К – абсолютная температура входного усилителя; – полоса накопительного фильтра устройства обработки.
– полоса накопительного фильтра устройства обработки.
 =
= 

При отсутствии пассивных помех от подстилающей поверхности для обеспечения заданной вероятности правильного обнаружения мощность сигнала на выходе устройства обработки должна быть равна:
????????=
 ????ш=
????ш= Вт
Вт По основному уравнению радиолокации рассчитаем среднюю излучаемую мощность
Перейдем от средней мощности к импульсной. Они связаны между собой через скважность Q:

Для сложного сигнала скважность равна отношению периода повторения сигнала к времени излучения за один период.
Учитывая ограничение на максимальную импульсную мощность, рассчитаем максимальную скважность сигнала:
4. ВЫБОР СИГНАЛА
Сначала рассмотрим последовательности, задающие амплитудную модуляцию для сложного сигнала. Самым распространенным типом сигналов, используемых для этой цели, являются двоичные импульсные последовательности со свойством «не более одного совпадения». Их основной особенностью является то, что коэффициент потерь не превышает

где N1 – число активных (ненулевых) символов в кодовой последовательности, равно числу импульсов, излучаемых за период. Поиск таких последовательностей может быть осуществлен с помощью перебора, эвристических алгоритмов или аналитически на основе различных разностных множеств.
Исходя из скважности, в таблице выбираем нужный сигнал.
| N1 | Q | Pmin | Номера позиций активных импульсов |
| 5 | 6,2 | 31 | 1 2 4 8 16 |
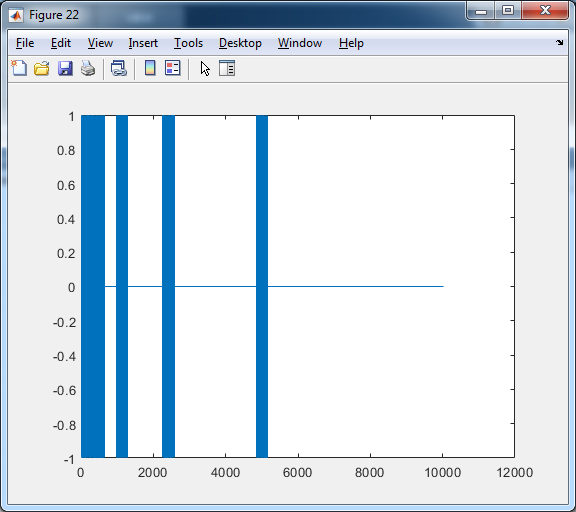
Рис. 1 – огибающая сигнала передатчика
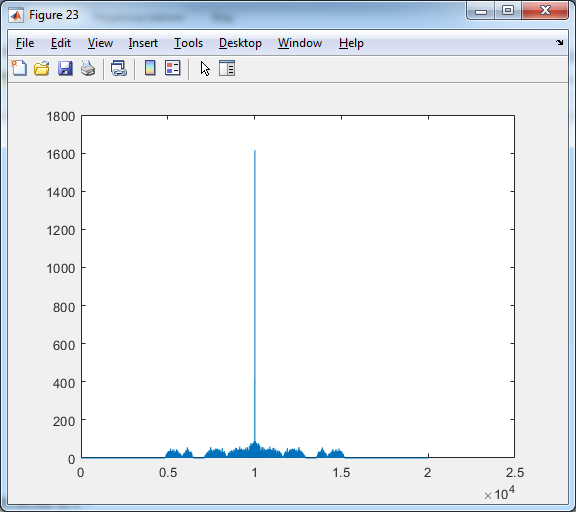
Рис. 2 – нормированная АКФ сигнала
Уровень БЛ = 0.0035
5. РАСЧЕТ ЗОНЫ ВИДИМОСТИ РЛС В СВОБОДНОМ ПРОСТРАНСТВЕ
Мощность сигнала отраженного от цели на входе приемника РЛС, как функцию от дальности до цели найдем исходя из основного уравнения радиолокации
где
 – текущее значение дальности, запишем отношение сигнал/шум через мощности принимаемого сигнала и шумов приемника:
– текущее значение дальности, запишем отношение сигнал/шум через мощности принимаемого сигнала и шумов приемника: 
Вероятность правильного обнаружения в свободном пространстве, как функция от дальности, определяется по формуле:
 ,
,зоной видимости будет являться тот участок дальности, где вероятность правильного обнаружения будет превышать заданную.
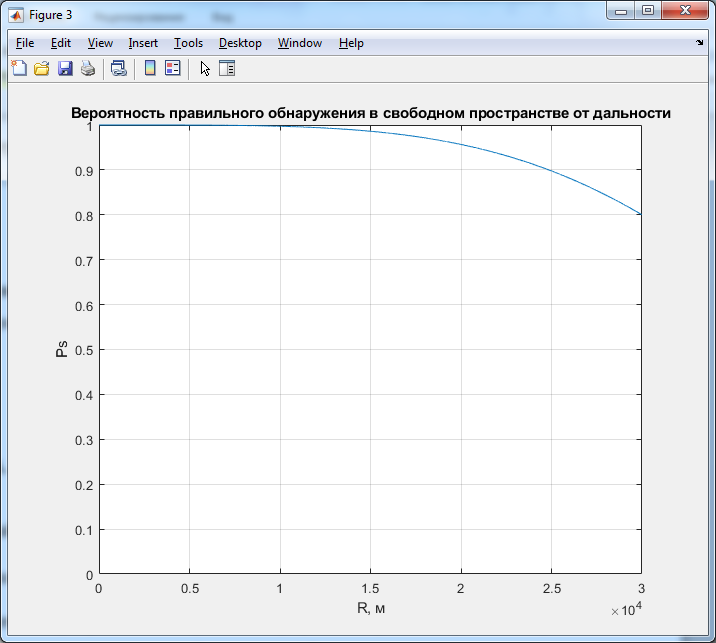
Рис. 4 Вероятность правильного обнаружения в свободном пространстве.
6. РАСЧЕТ ЗОНЫ ВИДИМОСТИ РЛС С УЧЕТОМ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ
Найдем площадь облучаемой поверхности моря
 . Эта площадь равна разности площадей секторов с радиусами
. Эта площадь равна разности площадей секторов с радиусами  и
и  , R – расстояние до элемента разрешения. Ширина сектора равна ширине диаграммы направленности антенны в горизонтальной плоскости .
, R – расстояние до элемента разрешения. Ширина сектора равна ширине диаграммы направленности антенны в горизонтальной плоскости .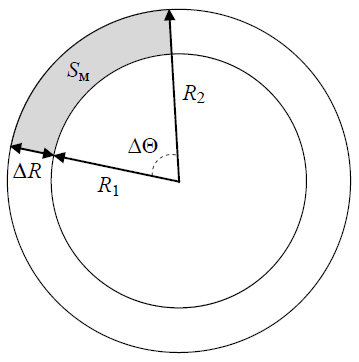

Общая облучаемая площадь

ЭПР моря равна
 , где
, где  – удельная ЭПР моря.
– удельная ЭПР моря.Удельная ЭПР морской поверхности зависит от ряда факторов:
-
состояние моря ;
; -
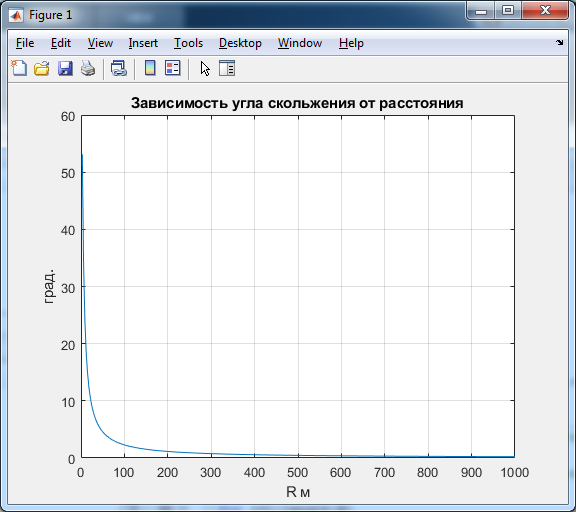
угол скольжения, под которым облучается участок водной поверхности ; -
вид поляризации сигнала; -
несущая частота облучающего сигнала или длина волны ; -
длительность импульса облучения; -
направление ветра;
Приводим график зависимости угла скольжения от расстояния. Видно что он постепенно стремится к нулю, следовательно его влияние можно не учитывать.
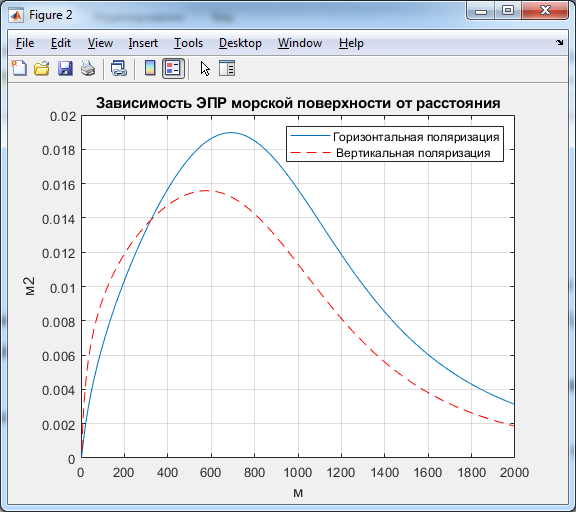
Согласно методическим указаниям для расчета удельной ЭПР поверхности моря расчитывать по следующей формуле:
 ,
,где:
 – средняя удельная ЭПР на горизонтальной поляризации, дБ;
– средняя удельная ЭПР на горизонтальной поляризации, дБ; λ – длина волны РЛС, м;
ψ – угол скольжения, рад;
 – коэффициент многолучевого распространения радиоволн;
– коэффициент многолучевого распространения радиоволн;  – коэффициент направления морских волн;
– коэффициент направления морских волн;  – коэффициент скорости ветра.
– коэффициент скорости ветра. , где hc - средняя высота морских волн, равная
, где hc - средняя высота морских волн, равная 

 , где
, где  ,
,  – скорость ветра.
– скорость ветра.В стационарном состоянии при полностью развитом волнении средняя высота морских волн связана со скоростью ветра формулой:
 , где измеряется в м/с,
, где измеряется в м/с,  – в метрах.
– в метрах.При использовании вертикальной поляризации в исследуемом диапазоне частот средняя удельная ЭПР моря:
 .
.