Файл: Разработка радиолокационной станции со сложным сигналом.docx
Добавлен: 10.11.2023
Просмотров: 120
Скачиваний: 10
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рис. 6 Зависимость ЭПР морской поверхности от расстояния
Так как ЭПР цели при вертикальной поляризации нв 0,002 меньше чем при горизонтальной. Значит для улучшения обнаруживающей способности будем применять именно горизонтальную поляризацию.
Переведем ЭПР поверхности моря из децибел в разы и подставим в основное уравнение радиолокации. Таким образом мы сможем рассчитать мощность сигнала, отраженного от поверхности моря, на входе приемника. То есть коррелированную помеху.
Для упрощения расчета некоррелированной помехи воспользуемся вычисленным ранее средним уровнем боковых лепестков сигнала. Некореллированная помеха образуется в дальностном канале, где находится цель, и отклик помехи находящаяся в соседних дальностных каналах.
Некоррелированную помеху необходимо просуммировать для всех элементов дальности, для которых уровень бокового лепестка не равен нулю.
Соответственно, суммарная некоррелированная помеха равна:
Также необходимо учесть, что вблизи антенны мощность отраженного от моря сигнала принимается боковым лепестком антенны, поэтому сигнал от моря ослаблен на 13 дБ.
Суммарная помеха от подстилающей поверхности будет равна:
 . Учитывая это и принимая во внимание зависимость от дальности, формула примет вид:
. Учитывая это и принимая во внимание зависимость от дальности, формула примет вид: .
. 
Рис.7. Зависимости вероятности правильного обнаружения от расстояния
Таким образом у нас уменьшается расстояние правильного обнаружения цели из за вносимых средой помех.
7. МОДЕЛИРОВАНИЕ РАДИОЛОКАЦИОННЫХ ИЗМЕРЕНИЙ
В рамках курсовой работы будем рассматривать двухкоординатную РЛС, измеряющую наклонную дальность до цели ρ и азимут α (от направления на север).
Рис. 8 Графическое представление измеряемых величин.
Траекторную обработку предпочтительнее осуществлять в прямоугольной СК. В рамках курсового проекта погрешности измерения полагаем гауссовскими с СКО
 и
и  соответственно. Дело в том, что при сопровождении в полярной СК динамика цели, даже движущейся равномерно и прямолинейно относительно РЛС, не может быть описана линейными разностными уравнениями, скорости изменения соответствующих координат выражаются нелинейными функциями времени, появляются фиктивные ускорения, нелинейно зависящие от координат.
соответственно. Дело в том, что при сопровождении в полярной СК динамика цели, даже движущейся равномерно и прямолинейно относительно РЛС, не может быть описана линейными разностными уравнениями, скорости изменения соответствующих координат выражаются нелинейными функциями времени, появляются фиктивные ускорения, нелинейно зависящие от координат.Исходные данные для расчета:
ρ = 30 км;
α = 45°;
V = 100 м/с
Т. к. уравнения, связывающие между собой предыдущее и последующее состояния уравнения движения цели, а также уравнение, отражающее взаимосвязь между состоянием цели и результатом измерения являются линейными, а входящие в них случайные последовательности аддитивные и гауссовские, то оптимальным устройством фильтрации в таком случае является фильтр Калмана. Результаты работы фильтра представлены на рис. 9.
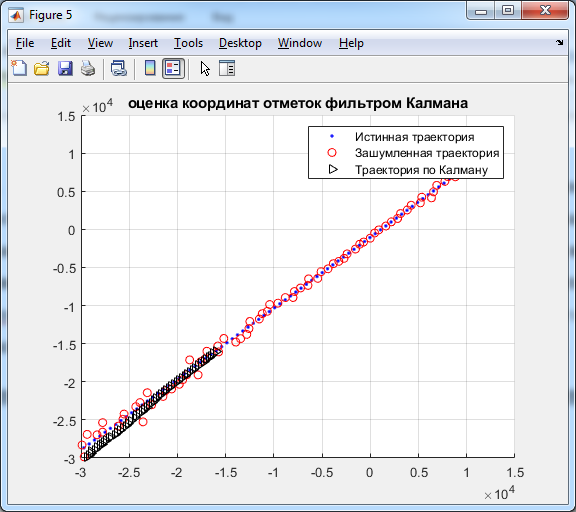
Рис. 9 Оценка координат отметок фильтром Калмана
Выводы
При выполнении данного курсового расчёта был изучен принцип действия радиолокационной станции со сложным сигналом. Исходя из технического задания на разработку были рассчитаны параметры сигнала, импульсная мощность передатчика, выбраны уровни ложной тревоги и правильного обнаружения, выбран зондирующий сигнал (НИП-31) с внутриимпульсной фазовой манипуляцией 5-и элементным кодом Баркера. Построена огибающая сигнала и его АКФ.
Так же исходя из заданных параметров была рассчитана зона видимости в свободном пространстве и с учётом подстилающей поверхности.
А так же произведена траекторная обработка и оценка координат отметок фильтром Калмана. С построением истинной и зашумлённой траекторий. Исходя из выше представленных расчетов можно сказать, что для заданных преподавателем требований, приведенная модель радиолокационной станции – походит.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
-
Levanon N., Mozeson E. Radar signals. Hoboken: John Wiley & Sons,
2004.
-
Баскаков С. И. Радиотехнические цепи и сигналы: Учебник для вузов. 2-е изд. М.: Высшая школа, 1988.
-
Вакман Д. Е. Сложные сигналы и принцип неопределенности в радиолокации. М.: Советское радио, 1965.
-
Васин В. В., Степанов Б. М. Справочник-задачник по радиолокации.
М.: Советское радио, 1977.
-
Винокуров В. И., Гантмахер В. Е. Дискретно-кодированные последовательности. Ростов-н-Д: Изд-во Ростовского ун-та, 1990.
-
Гантмахер В. Е., Быстров Н. Е., Чеботарев Д. В. Шумоподобные сигналы. Анализ, синтез, обработка. СПб.: Наука и Техника, 2005.
-
Ипатов В. П. Широкополосные системы и кодовое разделение сигналов. М.: Техносфера, 2007.
-
Коротковолновые антенны / под ред. Г. З. Айзенберга. М.: Радио и
связь, 1985.
-
Морская радиолокация / под ред. В. И. Винокурова. Л.:
Судостроение, 1986.
-
Радиотехнические системы: учебник для студ. вузов / под ред. Ю. М.
Казаринова. М.: Академия, 2008.