Добавлен: 10.11.2023
Просмотров: 103
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Муниципальное общеобразовательное учреждение
«Средняя общеобразовательная школа №16»
Индивидуальный проект
на тему:
4.6.1 «Я конструирую робота (мой первый робот)»
Выполнил:
ученик 7 Г класса
Шарафеев Ринат Маратович
Руководитель проекта:
Попова Мария Евгеньевна
учитель информатики
Магнитогорск 2023
Содержание
Введение 3
1 Теоретическая часть 4
1.1 История роботов 4
1.2 Какие бывают роботы 6
1.3 Изучение среды программирования Lego Mindstorms EV3 10
2 Практическая часть 13
2.1 Создание Робота-уборщика: основные деталис 13
2.2 Программирование Робота-уборщика 15
Заключение 16
Список используемой литературы 17
ВВЕДЕНИЕ
Актуальность выбранной темы заключается в том, что робототехника является одним из важнейших направлений научно-технического прогресса, в котором проблемы механики и новых технологий соприкасаются с проблемами искусственного интеллекта. Изучение основ робототехники очень перспективно и важно. Именно сейчас в современном обществе идет внедрение роботов в нашу жизнь, очень многие процессы заменяются роботами, человек не мыслит свою жизнь без робототехнических устройств.
Тип проекта: творческий.
Объектом индивидуального проекта является роботоконструирование.
Предмет проектного продукта – Робот-уборщик из LEGO Education MINDSORMS EV3.
Цель моего проекта: создать и запрограммировать Робота-уборщика, записать на видео его работу.
Я поставил перед собой следующие задачи:
-
узнать историю возникновения роботов; -
выяснить какие бывают роботы; -
изучить среду программирования Lego Mindstorms EV3; -
собрать и запрограммировать Робота-уборщика из конструктора LEGO Education MINDSORMS EV3; -
записать работу Робота-уборщика на видео.
В работе мною были использованы методы анализа и синтеза информации. Основные источники теоретической информации – Интернет-источники. Выполнение проекта способствует развитию познавательных, коммуникативных, мыслительных и творческих способностей. Работа над индивидуальным проектом научила меня осмысливать информацию и применять ее в своей деятельности.
Практическая значимость проекта заключается в том, что собранный в ходе работы материал о роботах и проектный продукт – Робот-уборщик (видеоролик о его работе), может быть использован на внеурочных занятиях, по пошаговому алгоритму,
представленному в проекте, робота сможет собрать любой желающий.
1 Теоретическая часть
1.1 История роботов
Если верить историческим данным, первые роботы в мире были созданы примерно в 300 году до нашей эры. Тогда, на маяке египетского острова Фарос, были установлены две огромные фигуры в виде женщин. В дневное время они хорошо освещались сами по себе, а ночью загорались искусственным светом. Время от времени они поворачивались и били в колокол, а ночью издавали громкие звуки.
Существует легенда, что еще во времена Ивана Грозного придворные мастера сделали механического слугу, который подавал царю кафтан, подметал пол и даже боролся с медведем.
В 1495 г. – Леонардо да Винчи создает проект механического рыцаря, чтобы показать, что машина может двигаться, как человек. Это изобретение эпохи Возрождения считается первым в истории роботом. В 1584 году да Винчи придумал и льва. Очевидцы в своих воспоминаниях описывали, что в однажды в комнату к королю Франции зашёл механический лев, который сел на задние лапы, раскрыл дверцы на груди, и там был виден букет лилий — геральдический символ как французских королей, так и Флоренции. Полного его изображения, как и полных чертежей, не сохранилось.
В 1740-х годах французский механик Жак де Вокансон, изучавший наследие Леонардо да Винчи, создал робо-уток из меди. По своей сути они были механическими игрушками, умевшими крякать, пить воду из чашки, есть зерно и хлопать крыльями. Пища «переваривалась» и затем, как у настоящей птицы, выходила «экскрементами» другого цвета. Механизм, управляющий птицей, был скрыт в постаменте.
1801 г. – Жозеф Жаккар представляет в Париже ткацкий станок, который сам изготавливает полотно. Для управления узорами на тканях используется перфокарта – бумажный носитель данных, моделирующий работу механизма.
Российская история робототехники началась в конце XIX в., когда инженер Пафнутий Чебышев сконструировал стопоход – механизм, обладающий высокой проходимостью.
В XX веке человечество уже осознало перспективы робототехники и всерьез занялось производством роботов. В те времена инженеры хотели создать человекоподобные механизмы, но на настоящих людей они не были похожи. По современным меркам они вовсе были металлическими монстрами, которые практически ничего не умели. Так, в 1928 году, американский инженер Рой Уэнсли показал публике робота «Мистер Телевокс», который умел двигать несколькими конечностями и выполнять простые голосовые команды.
Январь 2002 год первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен на рынок шведской компанией Electrolux. Робот ориентируется с помощью ультразвукового сонара и имеет высоту 13 см при диаметре 35 см. Максимальная скорость уборки — 40 квадратных сантиметров в секунду. Когда аккумуляторы робота «садятся», Trilobite сам находит зарядное устройство и едет заряжаться.
Сентябрь 2003 год на выставке Sony Dream World 2003 представлен робот QRIO, ранее известный под именем SONY SDR-4Х. Робот Qrio весит около 7 кг при росте в 58 сантиметров - такой размер Sony признала оптимальным и безопасным для игры с детьми. Благодаря 38 встроенным сервомоторам Qrio обладает достаточной свободой движений и хорошей координацией. Он может брать предметы, танцевать, подниматься по небольшой лестнице и держать равновесие, стоя на одной ноге. Робот знает более 60000 слов и обладает зачатками адаптивного поведения.
Октябрь 2007 год в Екатеринбурге успешно завершилась первая в России операция, выполненная при помощи робота-хирурга Да Винчи (операция на желчном пузыре). Благодаря этому хирургическому комплексу, врачи могут выполнять сложнейшие операции, вплоть до онкологических, дистанционно и в то же время с ювелирной точностью. Этот момент врачи первой областной клинической больницы называют историческим. Робот способен выполнять так называемые операции «замочной скважины» - без больших разрезов, через миниатюрные проколы в теле пациента.
В 2013 году Boston Dynamics показала всему миру робота Atlas.Разработка предназначена для перемещения по неровной местности на двух ногах.
2014 г – Aiko Chihira (Айко Чихира) – робот-гуманоид от Toshiba начал рабоатть в торговом центре. Он говорит на японском языке и владеет языком жестов. Айко помогает ориентироваться в торговом центре.
Сегодня в мире используются миллионы роботов. Применение им нашлось практически во всех сферах человеческой деятельности. Роботы управляют самолётами и поездами, спускаются в жерла вулканов и на дно океана, помогают в строительстве космической станции, в сборке автомобилей и производстве микрочипов, охраняют здания, используются военными для разведки и разминирования, помогают спасателям искать людей под завалами. Нет такой области, в которой человек не попытался создать себе автоматического помощника.
1.2. Какие бывают роботы
Конструкция роботов, их внешний вид и их назначения могут быть самыми разными. Одни роботы созданы, чтобы упростить человеку работу или сделать ее безопаснее. Другие – ради развлечения. Можно выделить следующие виды роботов:
-
Медицинские помощники.
Медицинские автоматизированные устройства используются для проведения лечебных или диагностических процедур. В эту категорию входят такие роботы:
- Хирурги (Рисунок 1). Используются для проведения оперативных вмешательств и манипуляций. Помимо операций, исполняют обязанности ассистента.
- Фармацевты. Изготавливают и сортируют лекарственные препараты.
- Протезы. Роботизированные аналоги помогают частично восстановить функции утраченных конечностей.
- Трансплантаты. Применяются в качестве замены переставших функционировать или травмированных внутренних органов. Такие ткани способны полностью заменить некоторые части организма.
- Сиделки. Используются для ухода за пациентами, неспособными самостоятельно обслуживать себя.
- Диагносты. Составляют план лечения и ставят диагноз, анализируя результаты обследования и данные анамнеза.
- Симуляторы пациентов. Используются для обучения или повышения квалификации медицинских работников.

Рисунок 1 - Роботы-хирурги
2) Бытовые ассистенты (Рисунок 2).
Такая техника предназначена для помощи человеку в выполнении повседневных задач. В категорию бытовых входят следующие типы роботов:
Транспортные. Применяются для организации пассажирских или грузовых перевозок.
Умный дом. Комплексная система помогает организовать работу бытовой и охранной техники.
Компаньоны. Универсальные роботы оказывают интеллектуальную и физическую помощь человеку.
Помощники. Применяются для выполнения повседневной домашней работы – уборки, приготовления пищи, мытья окон, кормления домашних животных, стрижки газонов, чистки бассейнов.
Роботы-игрушки. В эту категорию входят разновидности, применяемые для развлечения или обучения детей.
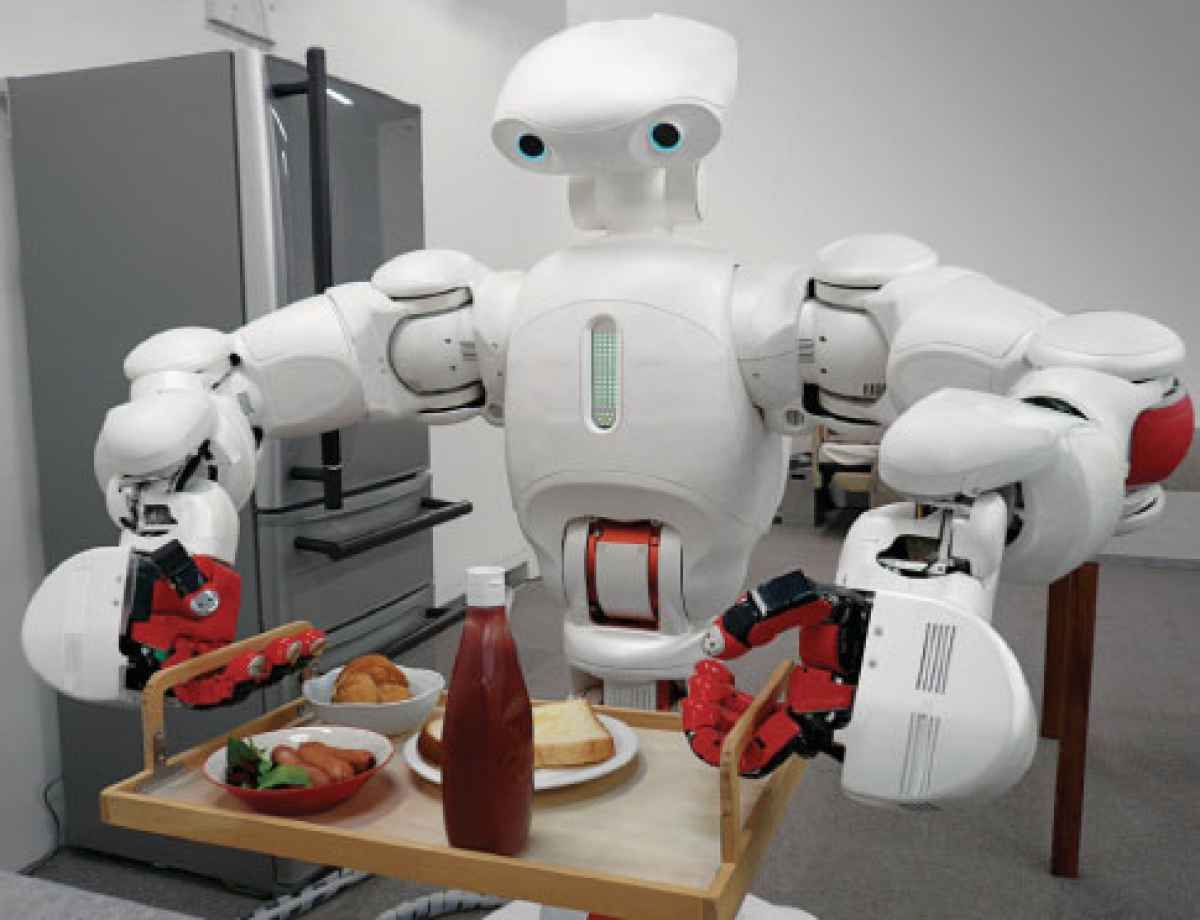
Рисунок 2 – Робот-ассистент
3) Сервисные
Классификация роботов включает в эту группу устройства, не относящиеся к другим категориям. К сервисным можно отнести средства сбора данных, демонстрации новых технологий, исследовательские аппараты, а также роботы, используемые в сфере услуг – консультанты, администраторы, промоутеры, гиды и т. д.
4) Военные роботы (Рисунок 3)
Военными называют многофункциональные технические средства, заменяющие человека при выполнении некоторых военных операций. Эти устройства наделены искусственным интеллектом и предназначены для задач, которые не может решить человек.
В современном мире существуют следующие разновидности военных роботов:
- Беспилотные летательные аппараты (БПЛА). Используются для выполнения надземных миссий, например, для наблюдения и сбора данных. Летательные роботы могут разрабатывать схемы нанесения ударов по точкам противника, проводить разведывательные операции.
- Сухопутные. В эту группу входят военные машины, передвигающиеся по земле и работающие без участия человека – саперы, системы наблюдения и охраны, боевые установки.
- Морские. Категория включает надводные и подводные роботизированные устройства, используемые для наблюдения, разведки, охраны, поиска мин.

Рисунок 3 – Военные роботы
5) Промышленные машины
Промышленные устройства помогают полностью или частично автоматизировать производственные процессы. По назначению аппараты делятся на такие типы:
- Литейные. Используются для расплавления и заливки металла. В эту группу можно включить главное достижение промышленной робототехники – 3D-принтеры. Основная сложность при создании таких роботов – обеспечение способности выдерживать температуру плавления металлов.
Средства механической обработки. Применяются для придания деталям нужной формы с помощью режущих и прессующих установок.
- Сборочные. Используются для физического совмещения или пайки элементов электронных схем.
- Окрасочные. Применяются для автоматического распределения лакокрасочных изделий и полировки поверхностей.
- Строительные. Помогают автоматизировать строительство и добычу ресурсов. В эту группу входят доставщики и укладчики строительных материалов.
- Фасовщики. Оценивают качество продукции, сортируют, упаковывают. Помогают автоматизировать конечный этап конвейерного производства.
- Транспортные. Используются для доставки продукции. Наиболее часто применяют конвейерные аппараты.
- Сельскохозяйственные. Автоматизируют весь процесс выращивания растительных культур.
6) Развлекательные (Рисунок 4). Они не требуют постоянного вмешательства человека в их работу, способны взаимодействовать с людьми в жилых домах или развлекательных заведениях. В эту группу входят:
- Андроиды, имитирующие поведение членов семьи. Могут «вливаться» в коллектив, общаться с окружающими и перемещаться по помещению.