Файл: Лабораторная работа 1 Понятие об автоматическом управлении.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 19
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Лабораторная работа № 1
Понятие об автоматическом управлении
Цель работы: изучить функционирование и конструкцию зарубежных и отечественных систем автоматического управления (регулирования) двигателем.
Задачи работы:
-
Ознакомиться с принципом действия системы автоматического управления (регулирования); -
Проанализировать особенности системы автоматического управления (САУ); -
Детально изучить и описать отдельные элементы, входящие в состав конкретной САУ (по указанию преподавателя);
Общие сведения
Работу любого двигателя внутреннего сгорания необходимо контролировать. Поэтому двигатель снабжается различного рода устройствами автоматического регулирования, управления, пуска, останова и др. Многие из них работают в режиме автоматического поддержания заданных значений отдельных регулируемых параметров (частоты вращения, температуры охлаждающей воды, давления наддува и др.). Другие - обеспечивают автоматическое управление работой узлов двигателя (системы автоматизации пуска и остановки, контроля и защиты, а также системы автоматизации агрегатов обслуживания, электронное управление впрыском топлива). Такие устройства необходимо проектировать, конструировать, испытывать, и это справедливо не только для ДВС, но практически для всех технических систем. Поэтому с течением времени была сформирована инженерно-техническая дисциплина «Теория автоматического регулирования и управления», некоторые фрагменты которой (применительно к двигателям внутреннего сгорания) представлены ниже.
В самом простом варианте системы автоматизации между собой взаимодействуют, по крайней мере, два элемента. Одним из них является сам двигатель как объект автоматического регулирования или управления, другим - устройство, обеспечивающее такую автоматизацию. Если это устройство предназначено для поддержания на заданном уровне значения регулируемого параметра, то такое устройство называется автоматическим регулятором, а совокупность двигателя и автоматического регулятора - системой автоматического регулирования (САР).
Совокупность двигателя, как объекта автоматического управления, с прибором или комплексом приборов, осуществляющих процесс автоматизации управления, называется системой автоматического управления
(САУ).
Современные системы автоматического управления (САУ) способствуют совершенствованию отдельных эксплуатационных свойств автомобиля, увеличивают надежность его агрегатов, улучшают комфортность и безопасность водителя и пассажиров, производят контроль и диагностику узлов автомобиля в процессе его эксплуатации.
Системы управления содержат технические средства, с помощью которых осуществляется выполнение заданных функций. Эти средства называются элементами автоматики. Каждый элемент имеет свое назначение.
Рассмотрим (рис. 1.1) общую функциональную схему системы автоматического регулирования (сокращенно – САР).
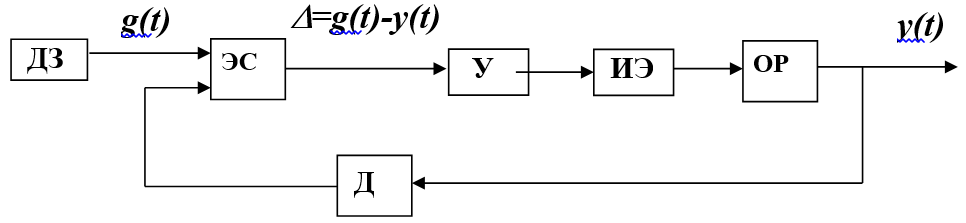
Рис. 1.1. Функциональная схема системы автоматического регулирования
-
y(t) – функция, описывающая изменение во времени регулируемой величины, то есть – регулируемая величина; -
g(t)- функция, характеризующая требуемый закон изменения регулируемой величины, назовем ее задающим воздействием; -
Д – датчик, измеряющий контролируемую величину; -
ДЗ – датчик задания, вырабатывающий сигнал задания (задающее воздействие); -
ЭС – элемент сравнения; -
У – усилитель сигнала; -
ИЭ – исполнительный элемент; -
ОР – объект регулирования.
Основная задача САР сводится к обеспечению равенства g(t)=y(t). Большинство САР решают эту задачу, используя регулирование по отклонению. То есть при регулировании стараются сократить разность = g(t)-y(t) .
Суть принципа такого регулирования заключается в следующем. Регулируемая величина y(t) измеряется с помощью датчика Д и поступает на элемент сравнения ЭС. На этот же элемент сравнения от датчика задания ДЗ поступает задающее воздействие g(t) . В элементе сравнения ЭС величины g(t) иy(t) сравниваются, то есть вычисляется отклонение = g(t)-y(t) . На выходе ЭС формируется сигнал, равный этому отклонению, то есть равный ошибке управления. Этот сигнал усиливается усилителем У и подается на исполнительный элемент ИЭ, который оказывает регулирующее воздействие на объект регулирования ОР. Это воздействие будет производиться до тех пор, пока регулируемая величина
y(t) с заданной точностью не приблизится к заданной g(t) .
На объект регулирования постоянно действуют какие-либо внешние возмущения. Например, если объектом регулирования является гидроцилиндр, с помощью которого мы должны перемещать некоторую массу с заданной скоростью (регулируемая величина y(t)), то такими возмущениями будут силы инерции и силы трения. Эти возмущения стремятся изменить заданную скорость перемещения (задаваемая величина g(t) ), и в задачу САР входит сделать разность между этими величинами как можно меньше, приблизить ее к нулю.
Решить проблему автоматизации управления узлами и агрегатами автомобиля на качественно новом уровне, в том числе создать САУ для управления агрегатами ступенчатой механической трансмиссией, стало возможным лишь с использованием средств электронной, а затем и микропроцессорной техники в системах управления.
Общий принцип работы электронной системы управления (ЭСУ) заключается в следующем.
Информация о режимах работы двигателя воспринимается с помощью датчиков, установленных на нем, преобразуется в электрические сигналы и передается к микропроцессору (МП). Сигналы могут быть аналоговыми и дискретными. Таким образом, в микропроцессоре всегда имеются определенные данные по всем контролируемым параметрам. В постоянном запоминающем устройстве (ПЗУ) микропроцессора содержится теоретически обоснованная информация о величине топливоподачи по положению дозирующих органов, моменте начала впрыскивания топлива и т.п.
В микропроцессоре производится сравнение фактических и эталонированных данных и вырабатывается сигнал рассогласования, с помощью которого приводятся в действие исполнительные механизмы перемещения дозирующих органов топливоподающей системы, установки угла опережения впрыскивания, воздушной заслонки и др.
Программа работы ЭСУ может составляться таким образом, что сигнал, воздействующий на исполнительные механизмы, представляет собой не какое-то компромиссное решение, обеспечивающее оптимальное сочетание экономичности и дымности ОГ, но и какое-то "экстремальное" воздействие, то есть воздействие на основе экстремума выбранного критерия оптимизации. ЭСУ может оснащаться несколькими программами, каждая из которых может быть включена в работу в зависимости от конкретных условий.
Электронные системы управления обладают высоким быстродействием и точностью регулирования.
Применение микропроцессорных САУ позволяет:
1) повысить надежность и точность работы САУ;
2 ) устранить механические, гидравлические или пневматические звенья и связанные с ними недостатки;
3) максимально приблизить режимы работы САУ к оптимальным;
4) увеличить скорость обработки информации;
5) унифицировать основные элементы САУ для различных по передаваемой мощности и числу ступеней коробок передач;
6 ) упростить обслуживание (устранена опасность засорения трубопроводов, имеющих место в гидросистемах САУ);
7) использовать элементы конкретной САУ в качестве одной из составных частей других управляющих систем или общей, централизованной системы автоматического управления рабочими процессами автомобиля;
8) ввести самодиагностику элементов САУ.
Основная классификация систем управления двигателем по общим признакам
 | Системы с программным управлением (без обратной связи) В эту группу входят системы, работающие без обратной связи по заранее определенной программе. Управляющее воздействие, определенное при помощи программы управления, подается посредством прямой связи на управляющий орган дизельного двигателя. Обратная связь по регулируемому параметру отсутствует, что позволяет обеспечить максимально возможное быстродействие, точность определяется тем, насколько программа управления учитывает реальное поведение объекта при заданных управляющих воздействиях. Системы с обратной связью (рис. 1.2, б). По существу, это системы, работающие по замкнутому циклу. |
| Рис. 1.2 – Системы управления двигателем | |
| В данных системах присутствует отрицательная обратная связь, функционирующая с целью уменьшения отклонения заданной величины управляемого параметра относительно измеренной. Быстродействие данных систем ниже, чем у систем без обратной связи, но при этом точность существенно выше. Комбинированные системы (рис. 1.2, в) представляют собой комбинацию двух вышеперечисленных подходов. Наличие в системе регулятора без обратной связи позволяет улучшить быстродействие системы в целом при высокой точности регулирования. | |
 | Адаптивные системы (рис. 1.3, г) – системы, в которых закон управления может быть изменен в процессе работы системы без вмешательства извне. Данные системы имеют функционал автоматической настройки. Интеллектуальные системы (рис. 1.3, д) – системы, представляющие собой реализации принципов искусственного интеллекта. Сюда могут быть отнесены системы, построенные на базе нечеткой логики и искусственных нейронных сетей. |
| Продолжение рис. 1.2 а- система с программным управлением, б - система с обратной связью, в- система комбинированного типа, г – адаптивная система, д - интеллектуальная система ОУ – объект управления, РП – программный регулятор, Р – регулятор с обратной связью, НД - регулятор на основе нечеткой логики; r(t) –заданное значение, e(t) – рассогласование, g(t) - управляющее воздействие, b(t) – отрицательная обратная связь | |
Применение систем программного управления не представляется возможным по причине склонности объекта к неуправляемому увеличению частоты вращения. Следовательно, применение адаптивных и интеллектуальных систем управления является наиболее целесообразным.
Учитывая постоянно ужесточающиеся требования к транспортным двигателям по экологическим показателям, экономичности и прочим эксплуатационным характеристикам, применяемые на них системы управления являются микропроцессорными.
Современный уровень развития микропроцессорных технологий позволяет обеспечить различные алгоритмы управления, в том числе и различные варианты реализации искусственного интеллекта.
Порядок выполнения работы
1.По указанию преподавателя выполнить анализ одной из систем автоматического управления двигателем (САУД) или системы автоматического регулирования (САР) отечественного или зарубежного производства.
2.Изучить и описать выбранную САУД по следующему плану:
а). дать общие сведения о системе САУД, описать ее тип, структуру;
б). в общем описать конструкцию и проанализировать компоновку САУД.
в). дать описание выполняемых функций САУД;
г). дать общие сведения о системе САР, описать ее тип, структуру;
д). в общем описать конструкцию и проанализировать компоновку САР.
е). дать описание выполняемых функций САР
3.Сформулировать основные выводы по проделанной работе. Оформить отчет.
КОНТРОЛЬНЫЕ ВОПРОСЫ
-
Что такое «управление»? -
ДВС как объект управления и регулирования. -
Понятие процесса автоматического регулирования. Классификация САУ. -
Элементы автоматического управления и регулирования -
САУ ДВС: основные подсистемы и элементы