Файл: Лабораторная работа 9 синтез систем управления средствами matlab siso design tool. студенты 3аит8 Кузнец Т. Н.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 28
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
М
 инистерство образования и науки РФ
инистерство образования и науки РФФедеральное государственное бюджетное образовательное учреждение высшего образования
«Самарский государственный технический университет»
Институт автоматики и информационных технологий
Кафедра «Автоматика и управление в технических системах»
Лабораторная работа № 9
«СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ СРЕДСТВАМИ MATLAB SISO DESIGN TOOL.»
Выполнил: студенты
3-АИТ-8
Кузнец Т.Н
Сыркин А.С
Проверил:
Рогачев Г.Н.
Цель работы:
Изучить методы синтеза систем управления средствами MATLAB SISO Design Tool.
Задание:
Спроектировать регулятор для одномерной линейной непрерывной системы с помощью SISOTool среды MATLAB
Описание системы
Рассматривается система стабилизации судна на курсе. Ее структурная схема показана на рисунке 5.
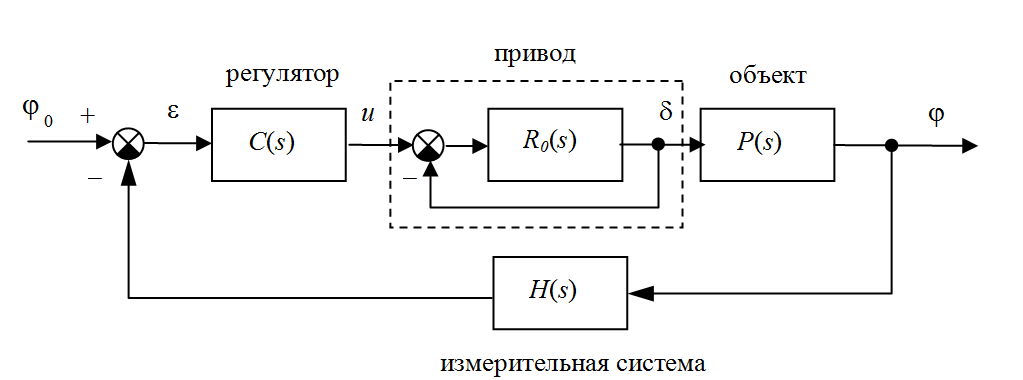
Рис. 5. Структурная схема системы стабилизации судна на курсе
Линейная математическая модель, описывающая рыскание судна, имеет вид
 где
где  – угол рыскания (угол отклонения от заданного курса),
– угол рыскания (угол отклонения от заданного курса),  – угловая скорость вращения вокруг вертикальной оси,
– угловая скорость вращения вокруг вертикальной оси,  – угол поворота вертикального руля относительно положения равновесия,
– угол поворота вертикального руля относительно положения равновесия,  – постоянная времени,
– постоянная времени,  – постоянный коэффициент, имеющий размерность рад/сек. Передаточная функция от угла поворота руля к углу рыскания запишется в виде
– постоянный коэффициент, имеющий размерность рад/сек. Передаточная функция от угла поворота руля к углу рыскания запишется в виде  .Привод (рулевая машина) приближенно моделируется как интегрирующее звено
.Привод (рулевая машина) приближенно моделируется как интегрирующее звено  , охваченное единичной отрицательной обратной связью.
, охваченное единичной отрицательной обратной связью.Для измерения угла рыскания используется гирокомпас, математическая модель которого записывается в виде апериодического звена первого порядка с передаточной функцией
Передаточная функция последовательного соединения объекта с приводом
Переходная характеристика этой модели:
График стремится к наклонной прямой, потому что системе P(s) содержится последовательно подключённый интегратор.
Коэффициент наклона асимптоты равен 0.07.
ЛАФЧХ разомкнутой системы
Система с регулятором
Максимальный коэффициент усиления разомкнутой системы равен бесконечности. Но Matlab выдает результат 276 дБ. Это объясняется тем, что Matlab не умеет работать с неконечными значениями, которые получились из-за наличия интегратора.
Исследование системы с пропорциональным (П-) регулятором
Переходная функция замкнутой системы при
Время переходного процесса 200 сек, перерегулирование 38.1.
Для обеспечения перерегулирования не более 10% требуется уменьшить коэффициент усиления регулятора до значения 0.403
Переходная функция скорректированной замкнутой системы при 0.403
Время переходного процесса 137 сек,
Запасы устойчивости: по амплитуде 19.9 дБ, по фазе 57.9 градуса.
Исследование системы с пропорционально-дифференциальным (ПД-) регулятором
Общий вид передаточной функции регулятора
Регулятор, обеспечивающий перерегулирование 10%
Для обеспечения перерегулирования 10% требуется выбрать K =1.45
Переходная функция скорректированной замкнутой системы
Время переходного процесса 28.1 сек,
Запасы устойчивости: по амплитуде 14.6 дБ, по фазе 29.6 градусов.
В сравнении с П-регулятором, использование ПД-регулятора позволяет добиться уменьшения времени переходного процесса при сохранении устойчивости.
Регулятор, обеспечивающий кратчайший переходный процесс
Для обеспечения минимального времени переходного процесса требуется выбрать K=1.1
Переходная функция скорректированной замкнутой системы
Время переходного процесса 19 сек,
Запасы устойчивости: по амплитуде 17 дБ, по фазе 66.8 градуса.
Передаточная функция замкнутой системы
0.093281 (s+0.05747) (s+0.3333)
--------------------------------------------------------------
(s+0.05474) (s^2 + 0.2502s + 0.02891) (s^2 + 2.089s + 1.129)
Порядок передаточной функции равен 5, потому что при нахождении данной передаточной функции в умножении участвовали передаточные функции: одна 3-его порядка и две первого.
Полюса передаточной функции
-1.0447 + 0.1945i
-1.0447 - 0.1945i
-0.1251 + 0.1151i
-0.1251 - 0.1151i
-0.0547
Близость полюсов к мнимой оси означает, что степень устойчивости мала При этом запас устойчивости больше, чем в случае полюсов, расположенных на большем расстоянии от мнимой оси.
Коэффициент усиления системы в установившемся режиме равен 1. Это объясняется тем, что коэффициент усиления объекта равен бесконечности.
При постоянном сигнале установившаяся ошибка отсутствует, потому что разомкнутая система содержит интегратор.
При линейно возрастающем сигнале установившаяся ошибка пропорциональна коэффициенту наклона сигнала, потому что система содержит один интегратор.
Передаточная функция замкнутой системы от входа к сигналу управления
Сигнал управления стремится к нулю
, потому что передаточная функция замкнутой системы от входа к сигналу управления имеет нуль в точке s=0.
Вывод:
Мы изучили методы синтеза систем управления средствами MATLAB SISO Design Tool.
Самара 2019