Файл: Магнитноинерциальный метод определения положения и ориентации объекта.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 19
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
УДК 51-74:[621.317.49+681.586]
Чье Ен Ун, Е. С. Чернышов, 2014
МАГНИТНО-ИНЕРЦИАЛЬНЫЙ МЕТОД ОПРЕДЕЛЕНИЯ
ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ОБЪЕКТА
Чье Ен Ун – д-р техн. наук, проф., зав. кафедрой «Автоматика и системотехника», тел.: (4212) 37-51-91, e-mail: chye@ais.khstu.ru; Чернышов Е. С. – асп. кафедры «Автоматика и системотехника», e-mail: neer.moar@gmail.com (ТОГУ)
В статье описан гибридный магнитно-инерциальный метод определения положения и ориентации объекта, использующий одну катушку индуктивности и современные цифровые трехосевые МЭМС датчики - магнитометр и акселерометр. Приведены алгоритмы для вычисления углов поворота и координат датчика. Предложен способ преобразования вектора магнитной индукции в координаты датчика с помощью таблично заданной функции.
Ключевые слова: позиционирование, положение и ориентация объекта, индукция магнитного поля, магнитометр, акселерометр, закон Био-Савара-Лапласа, матрица поворота, сферические координаты.
Введение
Магнитное позиционирование в настоящее время активно применяется в медицине, тренажерных системах и военной технике, т.к. в отличие от многих других методов обладает достаточной робастностью для данных применений. Известны методы магнитного позиционирования, использующие три ортогональных катушки индуктивности – источника магнитного поля, и один трехосевой магнитометр [1], или две ортогональные катушки и комбинацию из нескольких магнитометров, расположенных в вершинах многоугольника [2].
Теоретические основы
Вектор магнитной индукции является основной величиной, характеризующей магнитное поле в некоторой точке пространства. Именно эта величина измеряется датчиками магнитного поля - магнитометрами. Для известного источника поля, магнитную индукцию можно вычислить с помощью закона Био-Савара-Лапласа [3] (представлен в дискретном виде):
 ,
,где
 - составляющая вектора магнитной индукции, созданная фрагментом проводника
- составляющая вектора магнитной индукции, созданная фрагментом проводника  (направление вектора совпадает с направлением тока
(направление вектора совпадает с направлением тока  в проводнике);
в проводнике);  - вектор, соединяющий данную точку пространства с фрагментом проводника ;
- вектор, соединяющий данную точку пространства с фрагментом проводника ;  - магнитная постоянная;
- магнитная постоянная;  - относительная магнитная проницаемость среды (для воздуха можно принять равной единице).
- относительная магнитная проницаемость среды (для воздуха можно принять равной единице).
Определение ориентации
Выберем правую систему координат (рис. 1). Начальным угловым положением для простоты дальнейших расчетов принято положение датчика, в котором акселерометр имеет по своей оси z значение величины ускорения свободного падения g, зависящее от географического положения устройства, и 0 по осям x и y. А магнитометр имеет 0 по оси y, и некоторые значения
 и
и  по осям x и z, так как вектор индукции магнитного поля Земли направлен под определенным углом
по осям x и z, так как вектор индукции магнитного поля Земли направлен под определенным углом  к горизонту, зависящим от географического положения (рис. 2). Модуль вектора B также зависит от географического положения устройства.
к горизонту, зависящим от географического положения (рис. 2). Модуль вектора B также зависит от географического положения устройства.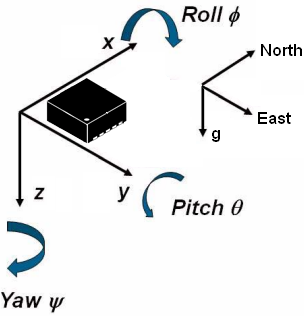
Рис. 1. Система координат датчиков
Заметим, что основной кристаллической фазой всех стеатитовых материалов является метасиликат магния, содержание которого составляет 60..70 % объемных. В качестве второстепенных минералов могут присутствовать в незначительном количестве муллит, кварц, кристобалит, шпинель и др. Химический состав некоторых представителей стеатитовых материалов представлен в табл. 1.
Таблица 1
Химический состав представителей стеатитовых материалов
| Материал | Содержание оксидов, % масс | ||||||||
| Al2O3 | SiO2 | Fe2O3 | CaO | MgO | Na2O | К2О | BaO | ZnO | |
| СПК-2 | 6,90 | 63,3 | 0,92 | 1,65 | 26,60 | 0,16 | 0,47 | - | - |
| СК-1 | 1,07 | 53,65 | 0,91 | 0,01 | 29,01 | 0,01 | 0,04 | 15,30 | - |
Библиографические
ссылки
-
Raab F., Bood E., Steiner O., Jones H. Magnetic position and orientation tracking system // IEEE Transactions on Aerospace and Electronics Systems. - AES-15(5), Sept. 1979. - P. 709-717. -
Смирнов Б.М. Устройство для определения положения объекта (варианты): пат. 2171476 Рос. Федерация : МПК G01R33/02, G01C21/04 – № 2000114436/09 ; заявл. 05.06.2000 ; опубл. 27.07.2001. -
Трофимова Т.И. Курс физики: учеб. пособие для вузов – 11-е изд., стер. – М.: Издательский центр «Академия», 2006. – 560 с. -
Чернышов Е.С. Метод локального позиционирования с использованием магнитного поля // Материалы секционных заседаний 52-й студенческой научно-технической конференции ТОГУ. – Хабаровск : Изд-во Тихоокеан. гос. ун-та, 2012. - С. 133-137. -
Talat Ozyagcilar. Implementing a Tilt-Compensated eCompass using Accelerometer and Magnetometer Sensors // Freescale Semiconductor Application Note. - Document Number AN4248, Revision 3, January 2012. -
Степанян Е. Г. О Михаиле Булгакове и «собачьем сердце» [Электронный ресурс] / Е. Г. Степанян. - 3-е изд. - М. : Теревинф, 2012. - 64 с. // ZNANIUM.COM : электронно-библиотечная система. - Режим доступа : http://znanium.com/ catalog.php# (16.01.2013)
Title: Magnetic-Inertial Technique for Determining Object Position and Orientation
Authors’ affiliation:
Chye En Un – Pacific National University, Khabarovsk, Russian Federation
Chernyshov E. S. – Pacific National University, Khabarovsk, Russian Federation
Abstract: The hybrid magnetic-inertial technique for determining object position and orientation, using one inductor coil and the modern digital three-axis MEMS sensors - magnetometer and accelerometer, is described. Algorithms for computation of the sensor rotation angles and coordinates are given. The method for conversion of the magnetic induction vector to the sensor coordinates using the table function is proposed.
Keywords: position and orientation tracking, magnetic field, magnetometer, accelerometer, Biot–Savart–Laplace’s law, rotation matrix, spherical coordinates.