Файл: Вопрос 2 Механизм и виды механизмов. Механизм представляет собой искусственно созданную систему по движно соединенных звеньев, предназначенную для передачи и преобра зования заданного движения одного или нескольких звеньев (входных,.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 26
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Вопрос 2 Механизм и виды механизмов.
Механизм представляет собой искусственно созданную систему по- движно соединенных звеньев, предназначенную для передачи и преобра- зования заданного движения одного или нескольких звеньев (входных, ве- дущих) в определенные движения остальных звеньев (входных, ведомых). По функциональному назначению механизмы делятся на следую-
щие виды:
– механизмы двигателей (механизмы двигателей внутреннего сгора- ния, электродвигателей, турбин и др.);
– механизмы преобразователей (механизмы насосов, компрессоров, гидроприводов и др.);
– передаточные механизмы;
– исполнительные механизмы;
– механизмы управления;
– механизм контроля и регулирования;
– механизмы подачи, транспортировки, питания и сортировки обраба- тываемых сред и объектов;
– механизмы автоматического счета, взвешивания и упаковки готовой продукции.
По признаку конструктивного оформления механизмы делятся на виды: рычажные, зубчатые, кулачковые, фрикционные, винтовые, клино- вые, механизмы с гибкой связью, с гидравлическими и пневматическими устройствами, с электрическими (электромагнитными) устройствами (по- следние в курсе прикладной механики не рассматриваются).Механизмы, входящие в состав современных машин, приборов и раз- личных механических устройств, весьма разнообразны. Они классифициру- ются, как уже отмечалось, по конструктивным, функциональным и кинема- тическим свойствам.
В рычажных механизмах звенья-стержни соединяются вращатель- ными и поступательными кинематическими парами, элементами которых являются поверхности. Благодаря этому они передают большие усилия и мощности. При этом они просты в изготовлении, надежны и долговечны в эксплуатации.
Назначение рычажных механизмов заключается в основном в преобразовании вращательного движения входного звена в возвратно- поступательное и качательное движение выходного звена с требуемыми па- раметрами.
В группе простейших рычажных механизмов наибольшее распростра- нение получили шарнирные четырехзвенники, кривошипно-ползунные и кулисные механизмы.
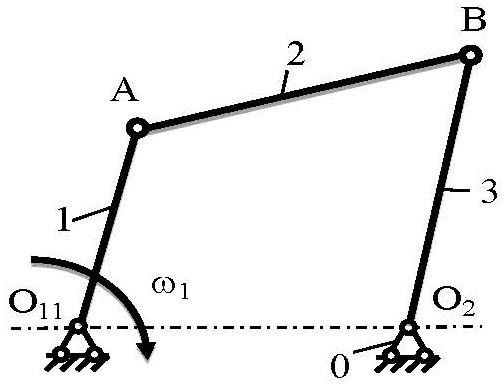
Шарнирный четырехзвенник (рис. 2, а) состоит из трех подвижных 1, 2, 3 звеньев и неподвижного звена 0. Звенья 1 и 3 являются кривошипами, если они поворачиваются на полный оборот, и коромыслами, если совершают ка- чательное движение. Звено 2 совершает плоскопараллельное движение и яв- ляется шатуном.
Механизм шарнирного четырехзвенника применяется в металлообра- батывающих станках, приборах, машинах легкой и пищевой промышлен- ности, снегоуборочных и других машинах.
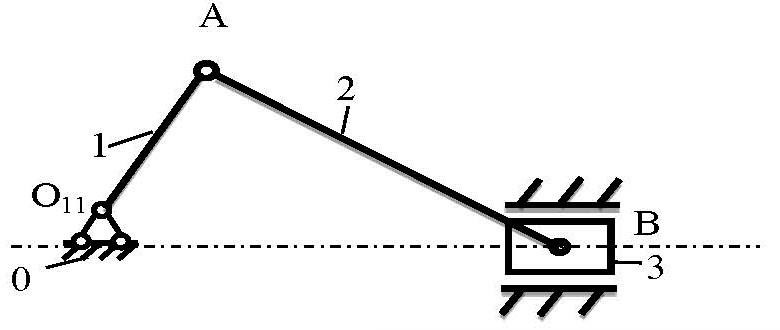
Кривошипно-ползунный механизм (рис. 2, б) используется для преоб- разования вращательного движения ведущего звена-кривошипа 1 в воз- вратно-поступательное движение выходного звена-ползуна 3. Ползун и кривошип соединяются с помощью шатуна 2. Кривошипно-ползунный
механизм применяется в двигателях внутреннего сгорания, в компрессо- рах, насосах, швейных и других машинах.
а б
в
Рис.2.Схема рычажных механизмов: а– шарнирный четырёхзвенник;
б– кривошипно-ползунный механизм; в – реальный объект
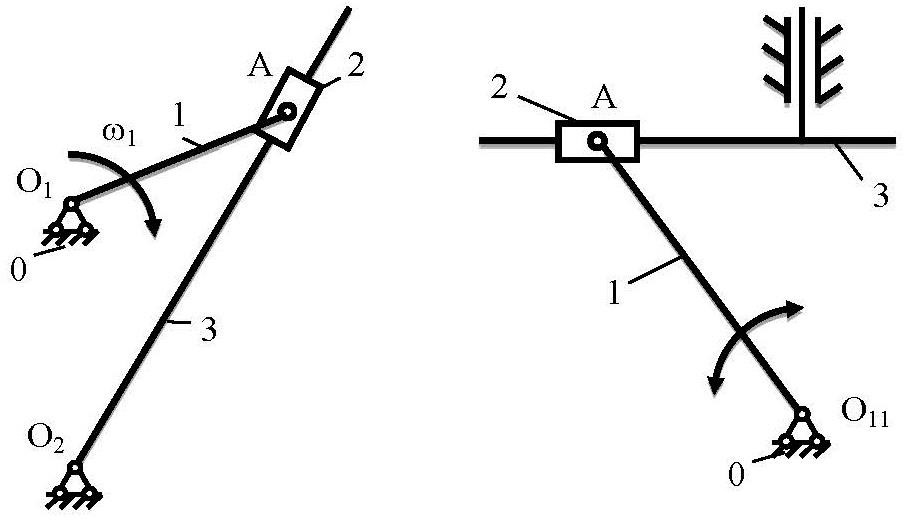
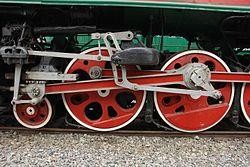
Кулисный механизм (рис. 3) состоит из кривошипа 1, кулисного камня 2, перемещающегося в подвижной направляющей-кулисе 3. Кулиса 3 в за- висимости от соотношения размеров звеньев может совершать враща- тельное с переменной угловой скоростью (О1А> О1О2) и качательное (О1А < О1О2) движения. В некоторых механизмах кулиса 3 движется воз- вратно-поступательно (рис. 3, б).
Кулисные механизмы, как правило, имеют асимметрию рабочего и хо- лостого ходов. Причем рабочий ход выполняется длительно, а холостой быстро. Поэтому такие механизмы применяют в машинах, где требуется быстрый обратный холостой ход рабочих органов, например при металло- обработке в строгальных станках. Широкое применение рычажные меха- низмы получили в робототехнике, а именно в конструкциях манипуляторов.
а б
в
Рис.3.Кулисный механизм: а, б – схема; в– реальный объект
-
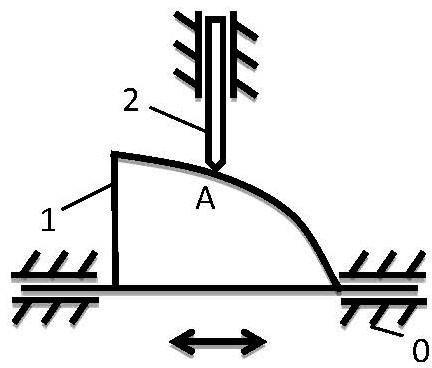
Кулачковые механизмы позволяют точно реализовать любой за- кон преобразования движения малым количеством звеньев, при этом они отличаются простотой и компактностью конструкции, поэтому их исполь- зуют в устройствах для управления рабочими процессами машин, а также в счетно-решающих устройствах и радио- и электронных приборах.
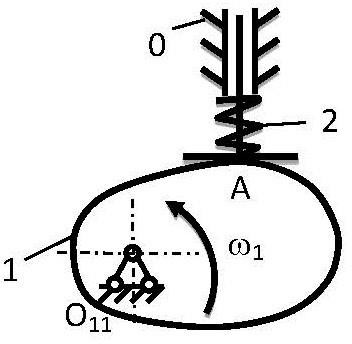
Кулачковый механизм (рис. 4) состоит из кулачка
1, толкателя 2 и стойки 0. В точке Азвенья механизма образуют высшую кинематическую пару (в высшей паре элементами пары является линия или точка). Ведущим звеном механизма является кулачок, который имеет форму диска или ци- линдра с профильным пазом. Форма профиля диска и паза может быть раз- нообразной. Она определяется законом движения ведомого звена, которым является толкатель. Толкатель может иметь различные конструкции: плос- кий толкатель (рис.4, а, б); острый толкатель (рис. 4, в); толкатель-коро- мысло (рис. 4, б, г); толкатель с роликом (рис. 4, г, д).
 а | 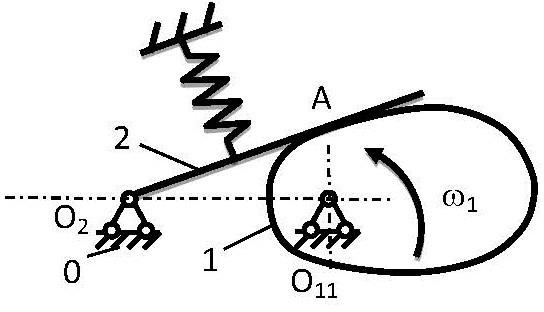 б |
 в | 2 3 1 1 г |
| 2 3 1 А 0 д | 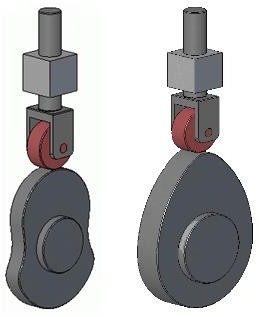 е |
 Рис.4.Разновидности кулачковых механизмов:
Рис.4.Разновидности кулачковых механизмов:а,б,в,г,д – схема; е– реальный объект
-
Винтовые механизмы представляют собой кинематическую вин- товую пару, которую используют для преобразования вращательного движения в поступательное, и наоборот (рис. 5). Применяют механизмы в измерительных приборах, устройствах точных перемещений, регулиро-
вания и настройки, в подъемно-транспортных устройствах и прессах. Ме- ханизмы обеспечивают высокую точность и плавность поступательных перемещений, большой выигрыш в силе.
а б
Рис.5.Винтовые механизмы: а– схема; б– реальный объект
При вращении винта 1 гайка 2 поступательно перемещается в направ- ляющих стойки 3. Возможна конструкция механизма, в которой ведущим звеном является фиксированная в осевом направлении вращающаяся гай- ка, а ведомым – винт, движущийся поступательно в направляющих стой- ки. Конструкции кинематической пары винт-гайка могут быть двух типов:
1) с трением скольжения; 2) с трением качения.
-
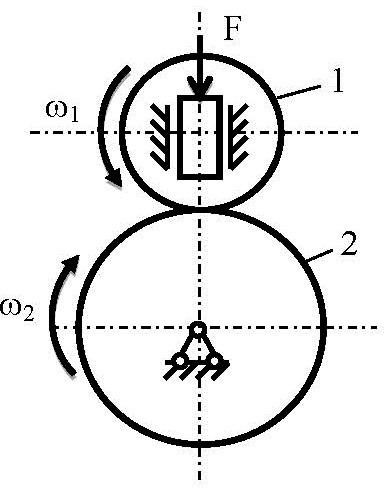
Фрикционными называются механизмы, в которых передача дви- жения от ведущего звена к ведомому осуществляется за счет сил трения, возникающих в результате их контакта. Применяются фрикционные меха- низмы в приборах, лентопротяжных механизмах и вариаторах и в других устройствах.
Фрикционные механизмы разнообразны по конструкции. На рис. 6, априведен механизм с параллельными осями. Он состоит из двух катков 1 и 2 и стойки. Каток 1 прижимается к катку 2 силой упругости Fпружины.
Фрикционные механизмы классифицируют: по форме контактирую- щих тел – на цилиндрические, дисковые, торовые, конусные; по располо- жению осей звеньев – с параллельными осями (рис. 6, а) и пересекающи- мися осями (рис. 6, б); по типу контакта – с непосредственным касанием звеньев (рис. 6, а, б, г), с промежуточным звеном (рис. 6, в), с гибкой свя- зью (ремни, нити, канаты); по передаточному отношению – с постоянным и переменным отношением (рис. 6, г).