Файл: Отчет по практической работе 5 по дисциплине Аппаратные средства телекоммуникационных систем.docx
Добавлен: 23.11.2023
Просмотров: 15
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
«ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ» (ТУСУР)
Кафедра комплексной информационной безопасности электронно-вычислительных систем (КИБЭВС)
РАБОТА С ЦИФРОВЫМ ДАТЧИКОМ ПО ИНТЕРФЕЙСУ 1-WIRE
Отчет по практической работе №5
по дисциплине
«Аппаратные средства телекоммуникационных систем»
Студент гр.739-1
_________Цыриторов Ц.Б.
__.__.2023
Руководитель
Профессор кафедры КИБЭВС, д.т.н.
________ Аврамчук В.С.
__.__.2023
Томск 2023
Введение
Цель работы – получить практические навыки работы с интерфейсом 1-Wire на основе CMSIS (Common Microcontroller Software Interface Standard). Реализовать функции записи команд и чтения данных по интерфейсу 1-Wire с датчика температуры DS18B20.
Задание: рассмотреть и описать представленные в курсе примеры программ, использующие интерфейс 1-Wire.
Теоретические сведения
DS18B20 – цифровой датчик температуры, поддерживающий 9–12-битное преобразование температуры. Структурная схема датчика показана на рисунке 1.
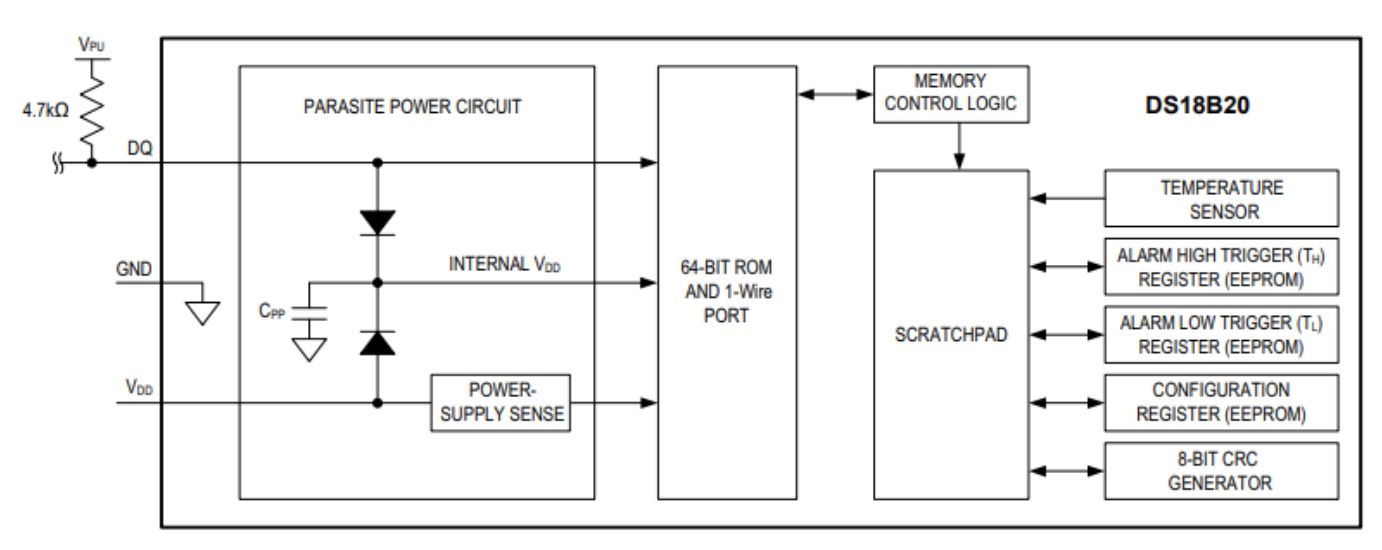
Рисунок 1 – Структурная схема
В состав датчика входит схема питания (Parasite Power Circuit), 64-битная память ROM для хранения кода (адреса) устройства, схема управления (Memory Control Logic), память для хранения данных (Scratchpad): температуры, настроек, граничных значений температуры, контрольной суммы CRC8; измеритель температуры (Temperature Sensor), модуль расчета CRC8 (8-BIT CRC Generator), регистры (EEPROM) для сохранения граничных значений температуры (Alarm High Trigger и Alarm Low Trigger), регистр для сохранения настроек (Configuration Register).
Для хранения температуры и настроек используется память размером 9 байт, структура которой представлена на рисунке 2.
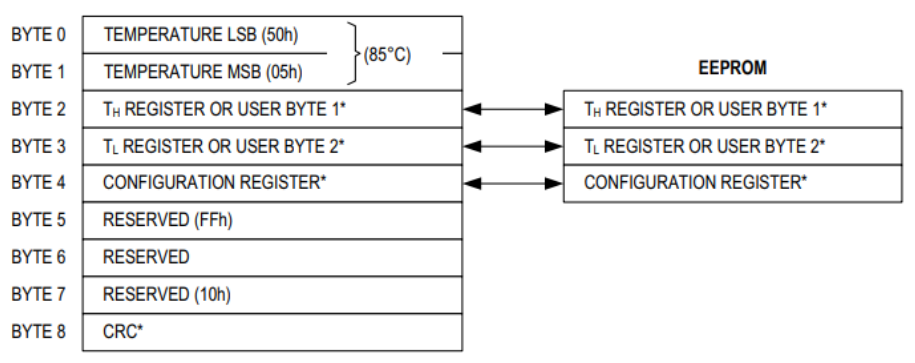
Рисунок 2 – Память для хранения температуры и настроек (Scratchpad)
Температура хранится в младших двух байтах памяти данных. Формат регистра температуры представлена на рисунке 3. Старшие 5 бит отводятся под знак, остальные 12 бит для кодирования температуры.

Рисунок 3 – Формат регистра температуры
За выход за старший бит, то есть, если температура не влезает в 7 бит (8-й отвечает за знак), то в 1 устанавливается флаг alarm flag.
На рисунке 4 представлен формат регистра настроек.

Рисунок 4 – Формат регистра настроек
Также, как ранее было сказано, рассчитывается код CRC8, для контроля целостности. Рассчитывается для байтов 0–7 памяти данных на основе образующего полинома X8+ X5+ X4+1.
Для проверки целостности данных необходимо вычислить CRC8 для принятых 8 байт память данных и сравнить полученную CRC8 с принятой CRC8 вместе с сообщением.
Если устройств в сети несколько, то необходимо либо предварительно узнать код каждого устройства (например, включая устройства по одному и читая их коды в память), либо использовать команду поиска кодов (0xF0) и специальный алгоритм считывания кодов устройств, основанный на том, что доминантным является низкий уровень сигнала на шине. Таким образом, если какие-то устройства будут выставлять на шине низкий уровень, а какие- то — высокий, то «победят» те, кто выставлял низкий уровень, и, соответственно, на шине установится низкий уровень.
Идея работы
Идея работы алгоритма поиска устройств заключается в следующем: после того, как мастер отправляет в сеть команду 0xF0, все Slave-устройства начинают обмениваться с мастером информацией по следующему алгоритму:
1) Slave передаёт мастеру младший бит ROM;
2) Slave передаёт мастеру инверсную копию младшего бита ROM и ждёт ответ от мастера;
3) Если мастер присылает в ответ тот же самый бит, который Slave посылал ему в пункте 1, то Slave повторяет шаги 1,2 для следующего бита ROM, в противном случае Slave прекращает обмен данными с мастером.
Со стороны мастера, при считывании битов от slave-устройств, возможны следующие ситуации:
-
Мастер считывает с шины 01. Это означает, что все устройства, участвующие в обмене данными, послали ему биты 01 (текущий бит ROM = 0, его инверсная копия = 1); -
Мастер считывает с шины 10. Это означает, что все устройства, участвующие в обмене данными, послали ему биты 10 (аналогично первому -
Мастер считывает с шины 00. Это означает, что какие-то устройства послали ему 01, а какие-то 10 (в обоих случаях победили те, кто посылал нули). Это означает, что перед мастером находится узел двоичного дерева, то есть на этой ветви существуют такие ROM-адреса, у которых следующий бит равен нулю и такие, у которых следующий бит равен единице; -
Есть ещё вариант, когда мастер считывает с шины 11. Казалось бы, такая ситуация является невероятной, однако она тоже возможна, например, если устройства, с которыми мастер решил продолжить обмен, отключились.
Работа с датчиком по интерфейсу 1-Wire осуществляется с помощью команд. Есть представление этих команд в виде однобайтового шестнадцатеричного кода. Например, Search ROM (код F0) – производит поиск ROM-кодов подключенных устройств; Read ROM (33) – чтение ROM-кода, если только одно устройство присутствует в сети. Полный список команд находится в документации к датчику.
К плате STM32F103RB подключается так, как показано на рисунке 5.
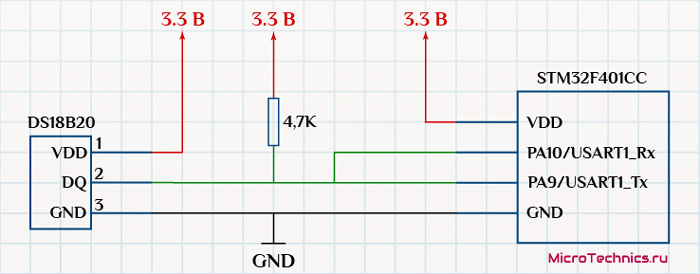
Рисунок 5 – Присоединение к плате
В данном случае приведена плата F401, но сути не меняет. К тому же, на плате F103RB можно переназначить любые пины на Wire.
1 ХОД РАБОТЫ
На рисунках 6 – 7 представлен код первой программы примера.
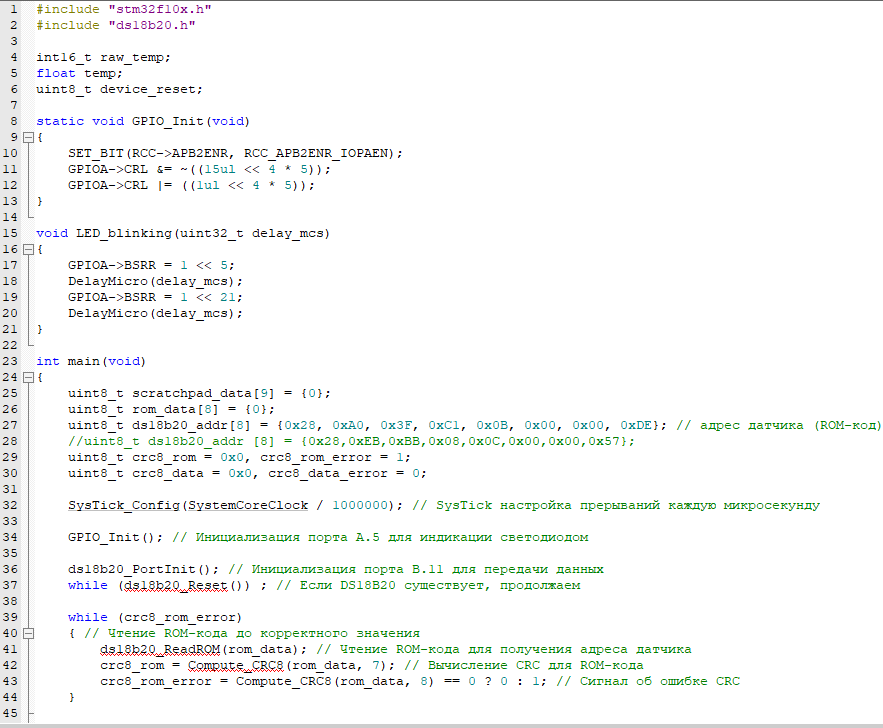
Рисунок 6 – Код программы №1. Часть 1
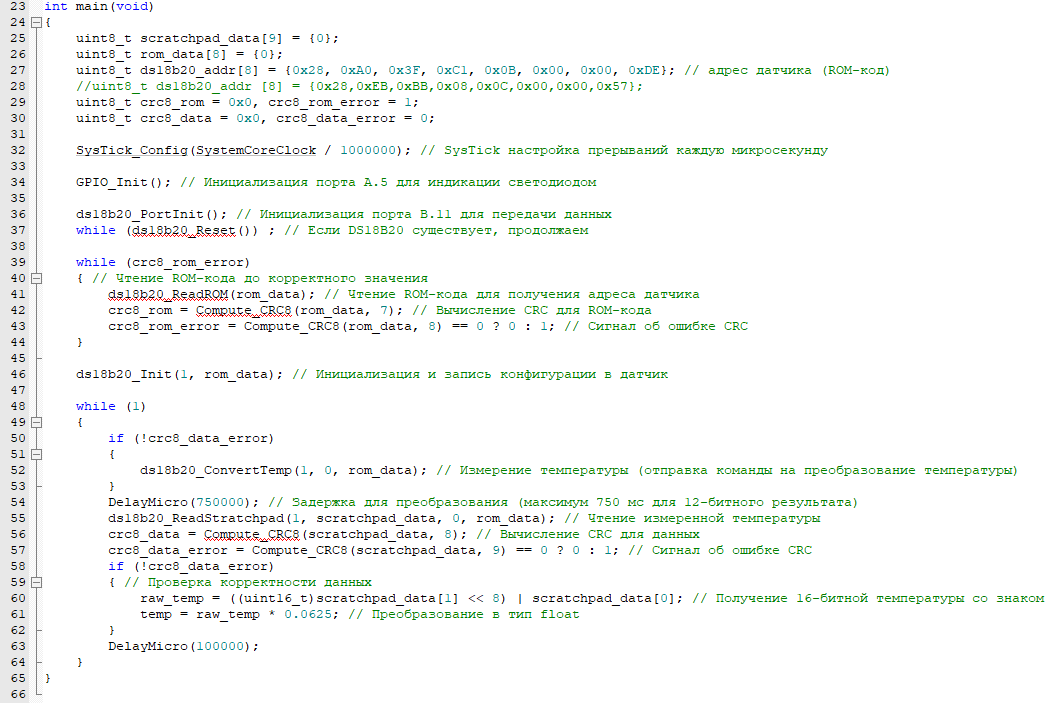 Рисунок 7 – Код программы №1. Часть 2
Рисунок 7 – Код программы №1. Часть 2В коде выполняется следующее:
-
Импортируются необходимые заголовочные файлы, включая "stm32f10x.h" и "ds18b20.h". -
Объявляются переменные raw_temp (для хранения сырого значения температуры), temp (для хранения преобразованного значения температуры) и device_reset (для обозначения состояния сброса устройства). -
Определяется функция GPIO_Init(), которая инициализирует порт GPIOA и устанавливает пин A.5 в качестве выхода для индикации светодиодом. -
Определяется функция LED_blinking(), которая мигает светодиодом путем установки и сброса соответствующего пина GPIOA с помощью задержки. -
В функции main() объявляются массивы scratchpad_data, rom_data и ds18b20_addr для хранения данных о температуре, ROM-коде датчика и адресе датчика соответственно. -
Задается переменная crc8_rom для хранения значения CRC для ROM-кода, а crc8_rom_error инициализируется значением 1 для обозначения ошибки CRC. -
Задаются переменные crc8_data для хранения значения CRC для данных, а crc8_data_error инициализируется значением 0 для обозначения отсутствия ошибки CRC. -
Настройка SysTick для генерации прерываний каждую микросекунду. -
Инициализация порта GPIOA с помощью функции GPIO_Init(). -
Инициализация порта B.11 для передачи данных с помощью функции ds18b20_PortInit(). -
Проверка наличия DS18B20 путем вызова функции ds18b20_Reset(). Если DS18B20 присутствует, программа продолжает выполнение. -
В цикле while происходит чтение ROM-кода до тех пор, пока не будет получено корректное значение. ROM-код считывается с помощью функции ds18b20_ReadROM(), а затем вычисляются значения CRC для ROM-кода с помощью функции Compute_CRC8(). Если CRC-значение равно 0, считается, что CRC прошла успешно, и значение crc8_rom_error устанавливается в 0. -
Вызывается функция ds18b20_Init(), которая инициализирует датчик с заданными параметрами и записывает конфигурацию в датчик. -
Внутри бесконечного цикла while (1) выполняются следующие действия:
a. Если crc8_data_error равно 0 (отсутствует ошибка CRC), то вызывается функция ds18b20_ConvertTemp() для запуска процесса измерения температуры. Параметры функции указывают на использование режима питания, передачу сигнала сброса и ROM-код датчика.
b. Затем следует задержка DelayMicro(750000) для ожидания окончания процесса преобразования температуры (максимальное время преобразования для разрешения 12 бит составляет 750 мс).
c. Вызывается функция ds18b20_ReadStratchpad(), чтобы считать измеренную температуру из Scratchpad. Параметры функции указывают на номер датчика, буфер для хранения данных Scratchpad, использование режима питания и ROM-код датчика.
d. Вычисляется значение CRC для считанных данных Scratchpad с помощью функции Compute_CRC8(), и результат сохраняется в переменной crc8_data.
e. Проверяется значение crc8_data_error, и если оно равно 0 (отсутствует ошибка CRC), выполняются следующие действия:
-
Сырые данные температуры извлекаются из буфера Scratchpad и сохраняются в переменной raw_temp. -
Производится преобразование сырых данных температуры в формат с плавающей запятой, умножая их на 0.0625, и результат сохраняется в переменной temp.
f. Следует задержка DelayMicro(100000) перед следующей итерацией цикла для создания интервала между измерениями температуры.
На рисунках 8 – 9 представлен код второй программы примера.
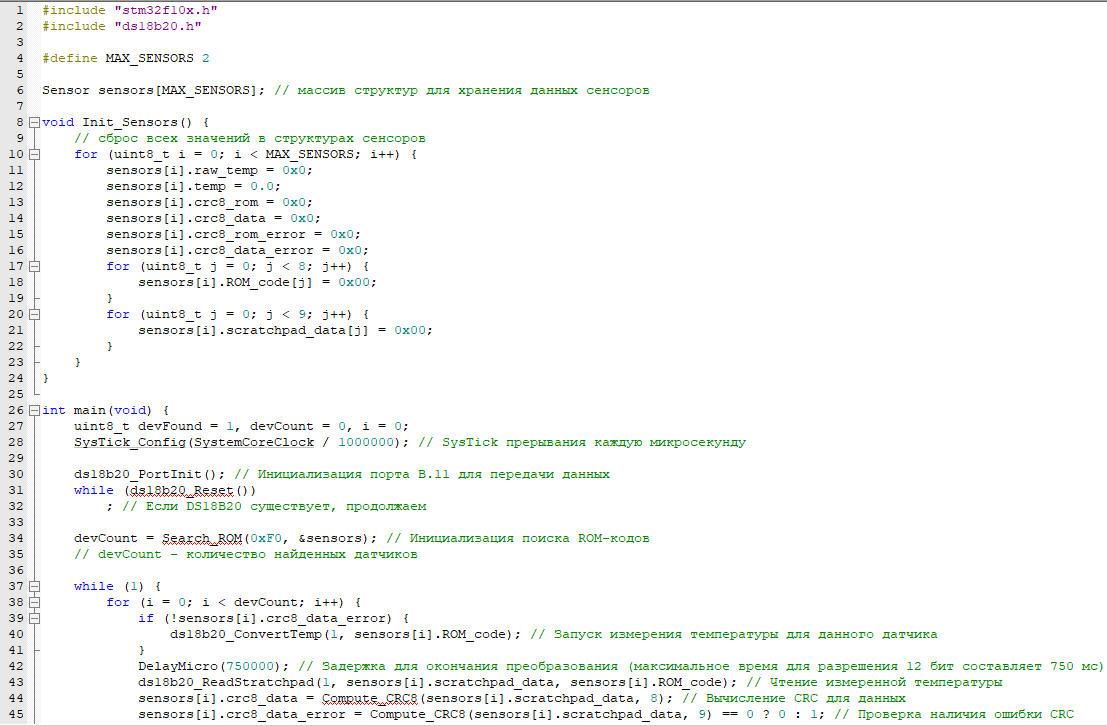
Рисунок 8 – Код программы №2. Часть 1
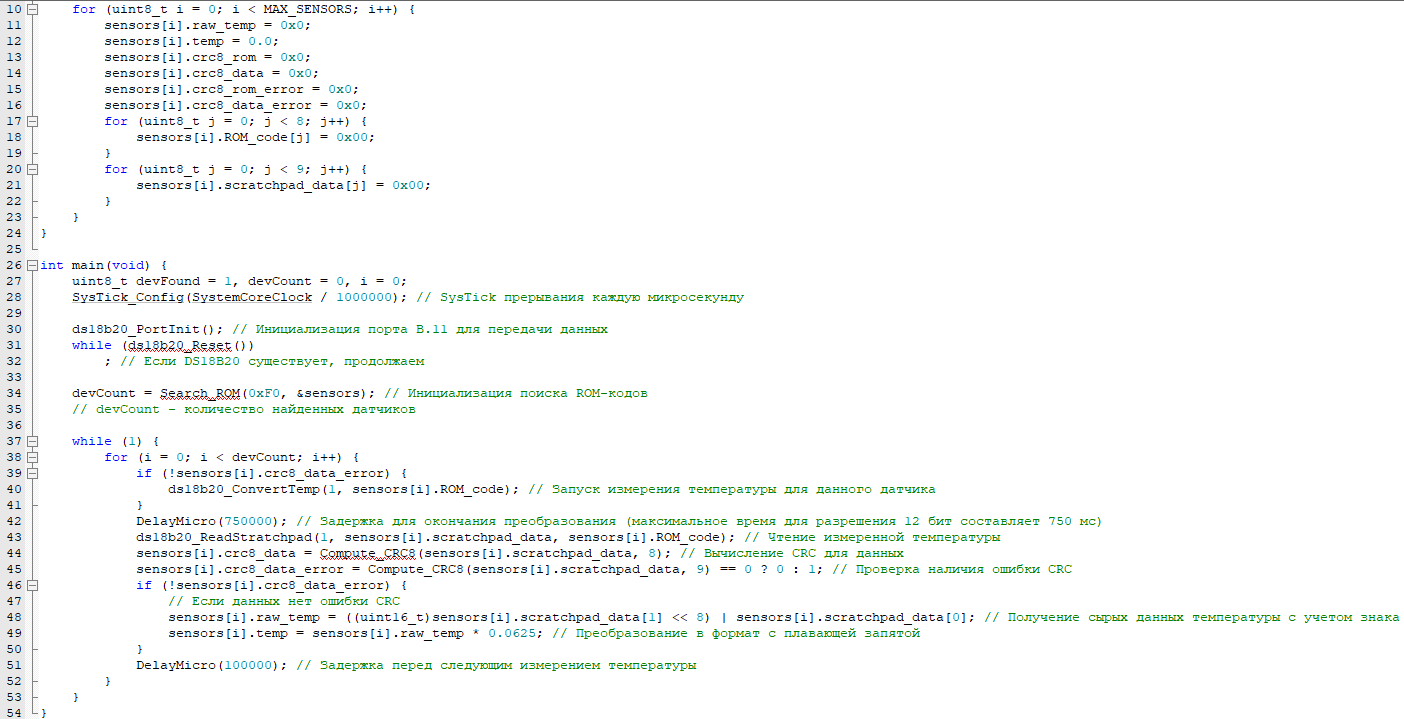
Рисунок 9 – Код программы №2. Часть 2
Ниже описано пошагово, что выполняется в коде:
1. Включение необходимых библиотек stm32f10x.h и ds18b20.h, которые содержат определения функций и структур для работы с микроконтроллером STM32F10x и датчиком DS18B20.
2. Определение максимального количества поддерживаемых датчиков MAX_SENSORS для установки размера массива структур датчиков.
3. Определение структуры Sensor, которая содержит переменные для хранения информации о датчике, такие как сырые данные температуры, преобразованная температура, значения CRC и т.д.
4. Объявление массива структур sensors, который будет использоваться для хранения данных о датчиках. Размер массива определяется константой MAX_SENSORS.
5. Определение функции Init_Sensors, которая инициализирует значения структур датчиков. В данном случае, все значения переменных структур устанавливаются в ноль.
6. Объявление переменных devFound, devCount и i, которые будут использоваться для управления поиском и обработкой датчиков.
7. Настройка прерывания SysTick с частотой 1 микросекунда. SysTick используется для создания микропауз в программе.
8. Вызов функции ds18b20_PortInit, которая инициализирует порт B.11 для передачи данных между микроконтроллером и датчиком DS18B20.
9. Цикл while для проверки наличия датчика DS18B20. Функция ds18b20_Reset вызывается до тех пор, пока датчик не будет обнаружен. Когда датчик обнаружен, цикл завершается и выполняется следующий шаг.
10. Вызов функции Search_ROM, которая инициализирует процесс поиска ROM-кодов датчиков. Первый аргумент функции указывает тип поиска, а второй аргумент - указатель на массив структур датчиков sensors, куда будут сохранены найденные ROM-коды.
11. Цикл while (1) - бесконечный цикл, в котором выполняется основная логика программы для обработки данных с датчиков.
12. Цикл for для обработки каждого датчика в массиве sensors. Переменная i используется для индексации датчиков в массиве.
13. Проверка флага crc8_data_error для каждого датчика. Если флаг равен 0, значит данные температуры корректны и можно выполнить преобразование температуры.
14. Вызов функции ds18b20_ConvertTemp для каждого датчика. Функция отправляет команду на датчик для начала процесса измерения температуры.
15. Задержка с помощью функции DelayMicro для ожидания завершения преобразования температуры. Длительность задержки составляет 750 миллисекунд, что является максимальным временем для преобразования 12-битного значения температуры.
16. Вызов функции ds18b20_ReadStratchpad для каждого датчика. Функция считывает данные о температуре из датчика в массив scratchpad_data для каждого датчика.
17. Расчет значения CRC для данных каждого датчика с помощью функции Compute_CRC8.
18. Проверка флага crc8_data_error для каждого датчика. Если флаг равен 0, значит CRC данных температуры корректно вычислено и можно преобразовать сырые данные в температуру.
19. Задержка с помощью функции DelayMicro перед следующим измерением температуры.
Заключение
В ходе лабораторной работы были получены практические навыки работы с интерфейсом 1-Wire на основе CMSIS (Common Microcontroller Software Interface Standard). Были рассмотрены программы примеры, представленные в курсе.
Отчет оформлен согласно ОС ТУСУР 01-2021.