Файл: Курсовая работа по дисциплине Электрические машины и электропривод Расчет энергетических показателей электроприводов типовых технологических процессов.docx
Добавлен: 24.11.2023
Просмотров: 199
Скачиваний: 9
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

где Rв – сопротивление обмотки возбуждения;
U – напряжение на зажимах генератора.
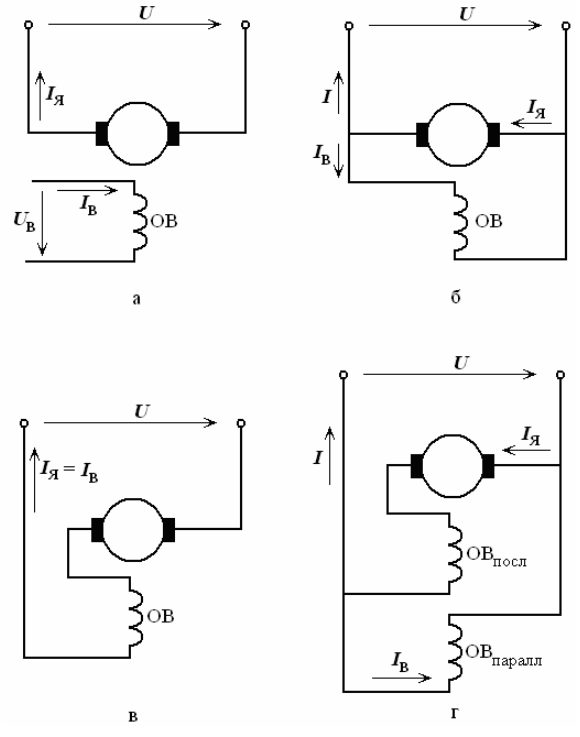
Рисунок 18. Способы возбуждения машин постоянного тока.
При этом соотношение между токами возбуждения, якоря и приемника определяется первым законом Кирхгофа:

Обмотка возбуждения в такой МПТ выполняется из тонкого провода с большим числом витков и обладает большим электрическим сопротивлением. В генераторе с последовательным возбуждением (рисунок 18, в) обмотка возбуждения включается последовательно с обмоткой якоря. При этом токи якоря, 17 возбуждения и приемника равны между собой:

Последовательная обмотка возбуждения выполняется из провода большого сечения с малым числом витков и обладает небольшим электрическим сопротивлением. Малое сопротивление последовательной обмотки возбуждения незначительно сказывается на соотношении тока и напряжения в цепи якоря. Генератор со смешанным возбуждением (рисунок 18, г) имеет две обмотки возбуждения: параллельную и последовательную. Генераторы с параллельным, последовательным и смешанным возбуждением получили название генераторов с самовозбуждением, поскольку их обмотки возбуждения питаются от зажимов собственного якоря.
1.2.1 Магнитная цепь МПТ
При проектировании МПТ необходимо определить зависимость основного магнитного потока Ф от тока возбуждения. Эту задачу решают расчетом магнитной цепи машины при холостом ходе, когда ток якоря Ia = 0.
Магнитной цепью принято считать совокупность устройств с ферромагнитными телами, образующих замкнутую цепь, в которой при наличии магнитодвижущей силы образуется магнитный поток, и вдоль которых замыкаются линии магнитной индукции. Типовой эскиз МЦ приведен на рисунке 19. Размеры отдельных элементов магнитной цепи и их параметры определяют тип характеристик, т. е., в конечном итоге, эксплуатационные свойства МПТ (двигателя) и надежность работы машины. Вследствие симметрии устройства машины и равенства потоков всех полюсов достаточно рассмотреть магнитную цепь одной пары полюсов.
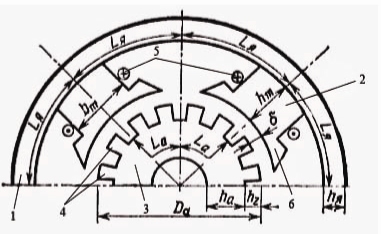
Рисунок 19. Магнитная цепь МПТ: 1-станина (ярмо), 2-сердечник полюса, 3-якорь, 4-зубцы якоря, 5-витки обмотки возбуждения, 6-полюсной наконечник.
1.2.2 Расчёт магнитной цепи МПТ в ПО «Ротор».
Расчет магнитной цепи и магнитной характеристики МПТ выполнялся с использованием программы «Ротор v1.3», которая была выдана преподавателем. Программа выполнена на языке DELPHI 0.7. В окне пользовательского интерфейса (рисунок 20) представлены исходные данные и результаты расчета магнитной цепи машины постоянного тока. Окно снабжено «Инструкцией», необходимыми комментариями и «ключами». «Ключи» не позволяют механически использовать программу, а заставляют обращаться к методическим указаниям и вникать в расчет. Для расчета в поле «Исходные данные» были введены данные согласно варианту. Запуск программы осуществлялся нажатием кнопки «Начать». Необходимые справочные данные вызывались соответствующими кнопками (магнитная индукция, напряженность и т. п.). После заполнения поля результатами вычисления нажали кнопку «График» для построения магнитной характеристики Ф =f(Ff) (рисунок 21). Для проверки расчета МЦ и магнитной характеристики МПТ выполняется с использованием программы «Ротор v2.0» программа выполнена на языке DELPHI 0.7.
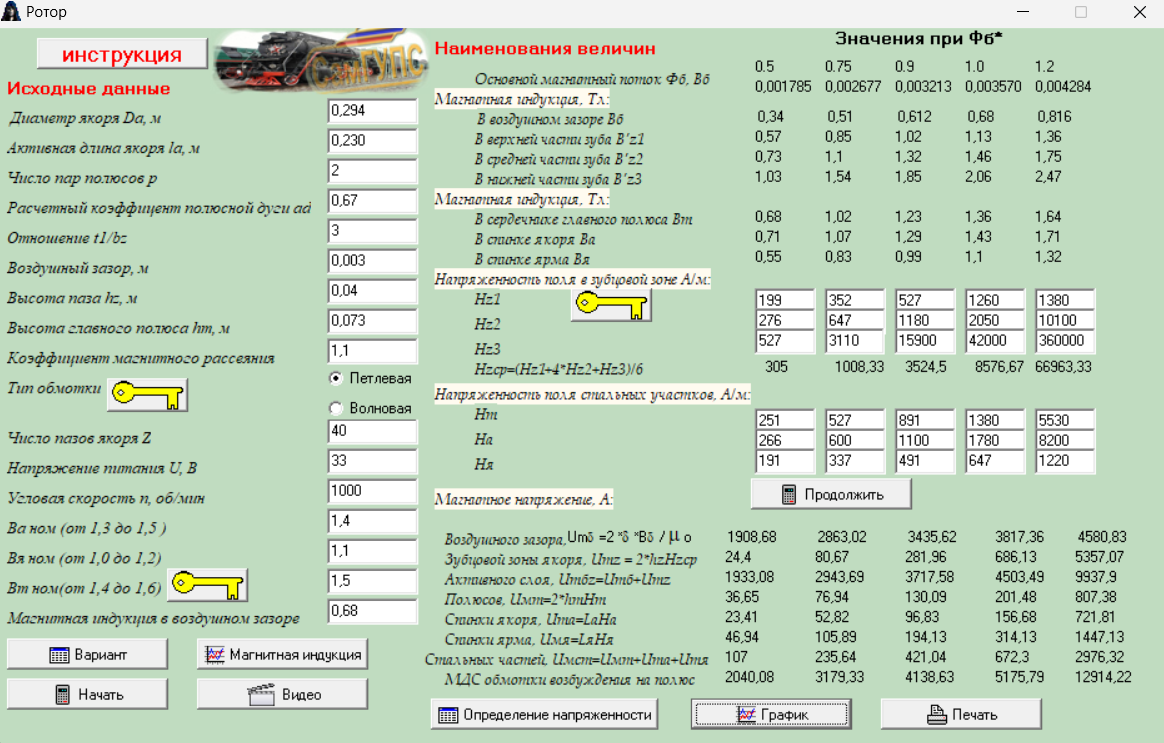
Рис. 20. Интерфейс пользователя программы «Ротор v2.0» с результатами расчётов.
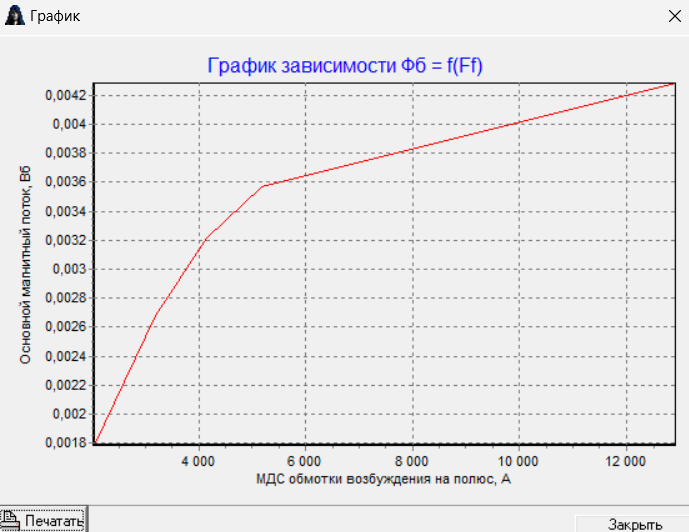
Рис. 21. График магнитной характеристики

1.2.3 Расчет коэффициента насыщения.
Kн = Ff / Uм при Ф* = 1,0.
Kн = Ff / Uм = 4138,63/3435,62=1,21
1.3 Заключение
Для машин постоянного тока коэффициент насыщения располагается в диапазоне от 1,2 до 1,7, в котором происходит преобразование одного вида энергии в другой. Принимаем полученный результат.
2. Электропривод.
2.1 Краткие теоретические сведения по основам электропривода
Электропривод – электромеханическая система (рисунок 22), состоящая из управляющего 1, преобразовательного 2, электродвигательного (ЭДУ) 3 и передаточного 4 устройств, предназначенная для преобразования электрической энергии в механическую и управления ею. Электропривод получает питание от системы электроснабжения (СЭС), имеет в своем составе средства обратной связи (COС) и приводит в целенаправленное механическое движение рабочую машину (исполнительный рабочий механизм – РМ), которая нагружает его моментом
Мс. Электрическая энергия напряжением U и частотой ƒ в двигательном и ряде тормозных режимов привода поступает от СЭС в его систему, необратимо преобразуется в тепло и механическую энергию вращения или поступательного движения РМ, а реактивная энергия индуктивного характера, определяющая обратимый процесс преобразования, возвращается в СЭС. При генераторном тормозном режиме привода и работе РМ в двигательном режиме привод становится источником активной энергии и отдает ее в СЭС.

Рисунок 22. схема электропривода
С помощью управляющего устройства 1 механическая энергия РМ может целенаправленно регулироваться. В качестве такого устройства используются от простейшего выключателя напряжения до сложного микропроцессора или ЭВМ, а преобразовательным служит устройство 2, которое согласует электрический сигнал управления с параметрами и величинами электрической энергии питания ЭДУ и имеет вид одного из электрических преобразователей: магнитного усилителя, тиристорного преобразователя, двигатель-генератора, дросселя насыщения, вентильного и электромашинного преобразователя.
ЭДУ может состоять из одного или нескольких различных или одинаковых двигателей, которые могут иметь разные электрические и механические связи.
Передаточные устройства приводов 4 могут быть представлены простейшими передаточными муфтами, редукторами или мультипликаторами, а также устройствами с гидро-, пневмо- или электромагнитными механизмами. Средствами обратной связи СОС в электроприводе выступают различные технические средства электрических измерений и преобразования неэлектрических величин в электрические, которые служат для целенаправленного и более эффективного управления. Электропривод (ЭП) в промышленности используется для приведения во вращательное движение рабочих органов механизмов и управления этим движением в ряде различных машин: механизмов подъема и передвижения, тормозных механизмов, противоугонных устройств; механизмов непрерывного транспорта – ленточных, скребковых транспортеров и винтовых конвейеров – шнеков; автопогрузчиков и электрического инструмента. Он также применяется в запорных и регулирующих устройствах гидро-, пневмо- и иных транспортных коммуникаций технологических процессов и в качестве индивидуальных приводов насосных, компрессорных и других агрегатов подачи воды, воздуха, цемента, химдобавок, инертных наполнителей и т. п.
ЭП можно классифицировать по следующим характеристикам:
– индивидуальный, групповой, взаимосвязанный и др.
2.2 Примеры отраслевых систем электроприводов
Крановые установки (КМУ) — это особый класс оборудования, без которого невозможно реализовать строительный проект любой сложности. Данная техника монтируется на подвижные платформы, и полученные таким способом подвижные манипуляторы активно задействуются для выполнения широкого спектра задач. Крановые установки получили большое распространение с момента их изобретения. В наши же дни они являются неотъемлемой составляющей парка любого предприятия, задействованного в строительной или смежной сфере. Данное оборудование отличается высокой
производительностью благодаря тому, что оснащается гидравлическим приводом. Такая особенность конструкции позволяет поднимать и перемещать довольно тяжелые грузы за относительно короткий промежуток времени.

Рис. 24. Крановая установка
Стрелочный электропривод — электромеханический переводной механизм, применяемый на железнодорожном транспорте при электрической, диспетчерской и горочной централизациях. Он предназначен для перемещения остряков стрелочного перевода из одного положения в другое, запирания остряков в крайнем положении, получения непрерывного контроля фактического положения стрелки. Установка электропривода производится на специальную гарнитуру, которая крепиться к рельсам с правой или левой стороны стрелочного перевода.

Рисунок 25. Стрелочный перевод
Электрокары широко применяются на предприятиях для перевозки грузов внутри цехов (благодаря отсутствию вредных выхлопов), на аэродромах и железнодорожных вокзалах. Большая часть электрокаров отличается компактными габаритами при достаточно высокой грузоподъёмности (от 0,25 до 5 т и более) и часто — колёсами с литыми резиновыми шинами (
грузолентами). По конструкции к электрокарам близки электропогрузчики и коммунальные электромобили. В качестве тяговых аккумуляторов используются как кислотные, так и щелочные (никель-кадмиевые).[1]
На электрокарах и электропогрузчиках производства XX века (и их аналогах современного выпуска) установлен коллекторный тяговый двигатель, пуск — реостатный, причём на некоторых типах машин регулирование идёт не только за счёт введения реостата, но и за счёт пересоединения секций батареи — при параллельном соединении половин батареи напряжение вдвое ниже, при последовательном соединении напряжение и с ней скорость электрокара возрастают вдвое.[1]
В последнее время большое значение приобрели электротягачи (самоходные электротележки) — тягачи, предназначенные для перевозки грузов в пределах предприятия, для средних дистанций перемещения, с частой сменой прицепных устройств (тележки). Важнейшими характеристиками для электротягача являются величина тягового усилия (до 25 т) и габаритные размеры самой электротележки. Имеются электротележки с управлением рычагом вместо руля и контроллером (3 скорости), масса с батареей 1500 кг, разрешённая нагрузка 1500 кг. Электротягачи предназначены для буксировки тяжёлых грузов, крупных габаритов и большой длины. Также электротягачи используются для буксировки техники, которая не имеет самостоятельного хода. Электротягачи управляются оператором стоя или сидя, в зависимости от типа работы внутри или снаружи помещения. Большое распространение электротягачи приобрели в автомобильной промышленности. Расстояния, на которые перемещаются грузы, могут быть разными в зависимости от площади склада, схем размещения складских зон и маршрутов транспортировки. На коротких трассах целесообразно использовать самоходные электротележки, сопровождаемые пешим оператором. При средних расстояниях перевозки и большей интенсивности работ применяют транспортировщики поддонов с платформой или площадкой для оператора. Для перемещения штучных грузов или грузов в прицепных контейнерах применяются электроприводные тягачи и платформенные тележки. Также большое распространение получили электротележки с неподвижной платформой — предназначенные для перевозки грузов в стеснённых условиях по дорогам с твёрдым покрытием на промышленных предприятиях,