Файл: Контрольная работа по дисциплине ОП. 09 основы автоматики и элементы систем автоматического управления.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 35
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Для устранения этого недостатка в теории построения СУ более широко применяют принцип обратной связи. Этот принцип предполагает управление, основанное лишь на изучении отклонения хε регулируемой величины х от ее заданного значения х0 и непосредственно не связанное с измерением возмущений f1,...,fn, действующих на объект регулирования.
Для построения структурной схемы САУ замкнутой ОС (рисунок 5.8) необходимо, в отличие от САУ по возмущению (см. рисунок 5.6) лишь одно управляющее устройство — регулятор Росс передаточной функцией Woc
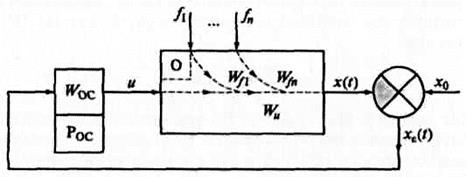
индекс ОС относится к блоку обратной связи; Wf1и Wfn— передаточные функции объекта соответственно по возмущению и по управлению; х0 — установленное значение регулируемой величины; f(t) — возмущение; x(t) — регулируемая величина; xε(t) — ошибка регулируемой величины; u — управляющее воздействие
Рисунок 5.8 – Структурная схема системы управления с обратной связью (принцип управления по отклонению)
К недостаткам принципа обратных связей следует отнести затруднения, возникающие в процессе разработки быстродействующих САУ, особенно для сложных инерционных объектов. Стремление повысить точность работы таких систем и увеличение коэффициента усиления регулятора Р0с могут привести к потере устойчивости.
Пример применения принципа ОС в САУ сварочными процессами приведен на рисунке 5.9. Регулируемая величина в данном случае — ширина обратного валика b. Измерительное устройство величины b — это фотодатчик, устанавливаемый с обратной стороны изделия, при расплавлении последнего дугой.
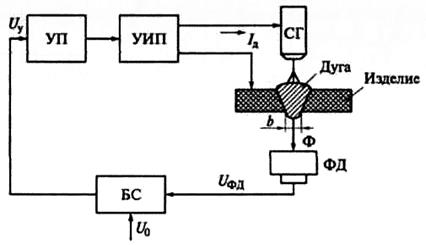
ФД — фотодатчик контроля проплавления; УП — усилитель-преобразователь; УИП — управляемый источник питания дуги; СГ — сварочная горелка; Uфд — напряжение фотодатчика; Ф — световой поток; БС — блок сравнения; U0— эталонная уставка по напряжению сети; Uy— сигнал управления; Iд — ток дуги
Рисунок 5.9 – Система регулирования значения
b — ширины обратного валика с фотодатчиком в цепи обратной связи
Недостатки САУ с ОС можно устранить созданием комбинированных автоматических систем управления, объединяющих оба отмеченных принципа управления (рисунок 5.10).
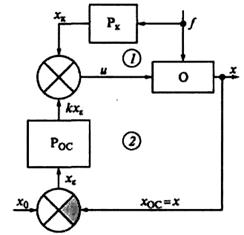
1 и 2 — контуры регулирования по возмущению и отклонению; Рк — регулятор в блоке компенсации; Рос — регулятор в цепи обратной связи; хк— сигнал компенсации; индекс ОС относится к блоку обратной связи; х0 — установленное значение регулируемой величины; f(t) — возмущение; u — управляющее воздействие;
Рисунок 5.10 – Принципы комбинированного управления
В подобных комбинированных системах основная тяжесть компенсации главного возмущения f, действующего на систему, ложится на регулятор Рк. Точный регулятор Рoс подавляет или ослабляет остальные возмущения, действующие на объект, и приводит действительное значение регулируемой величины х к заданной х0. Пример использования комбинированного управления в сварочных установках приведен на рисунке 5.11. Принцип компенсации реализован в контуре 1, формирующем систему стабилизации напряжения на дуге Uaпри возмущениях по длине дуги lд(при регулировании использована линейная связь Uд= кlд). Контур 2 построен по принципу работы системы, представленной на рисунке 5.9. Регулируемая величина — это ширина обратного валика b.
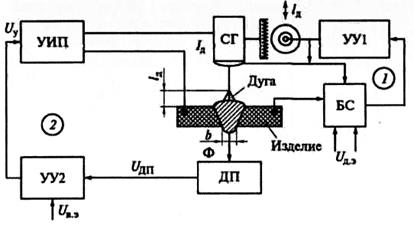
1 и 2 — контуры регулирования по возмущению (длине дуги lд) и отклонению (ширине обратного валика b); УУ1 — привод перемещения СГ по вертикали; УУ2 — устройство управления параметрами УИП по сигналу от датчика проплавления (ДП); Uвэ — уставка номинального параметра b; Uд.э — уставка по напряжению дуги; Uдп — сигнал на выходе ДП; УИП — управляемый источник питания дуги; СГ — сварочная горелка; Ф — световой поток; БС — блок сравнения; Iд — ток дуги.
Рисунок 5.11 – Система комбинированного управления параметрами сварочного процесса
2. Переключающие устройства (реле, контакторы, магнитные пускатели и др.).
3. Программируемые логические контроллеры Siemens LOGO! и ОВЕН. Схемы подключения.
4. Понятие устойчивости САУ.
5. Виды сигналов и их характеристики.
Список использованных источников и литературы:
1. Сибикин Ю.Д., Сибикин М.Ю. Электробезопасность при эксплуатации электроустановок промышленных предприятий. - М.; Академия, 2014
2. https://studopedia.ru/
3. http://www.zakonprost.ru/content/base/part/333064