Файл: Ledpixel Связанные знания Светодиодный модуль Freenove 8 rgb.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 118
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Знание компонентов
Двигатель постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Двигатели постоянного тока состоят из двух основных частей: статора и ротора. Неподвижной частью двигателя постоянного тока является статор, а вращающейся частью — ротор. Статор обычно является частью внешнего корпуса двигателя (если это просто пара постоянных магнитов) и имеет клеммы для подключения к источнику питания, если он состоит из катушек электромагнита. В большинстве двигателей постоянного тока для хобби используются только постоянные магниты для поля статора. Ротор обычно представляет собой вал двигателя с 3 или более электромагнитами, подключенными к коммутатору, где щетки (через клеммы 1 и 2 ниже) подают электроэнергию, которая может приводить в действие другие механические устройства. На приведенной ниже схеме показан небольшой двигатель постоянного тока с двумя клеммами.
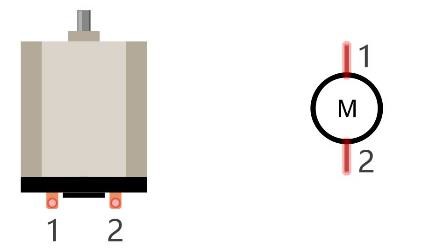
Когда двигатель постоянного тока подключен к источнику питания, он будет вращаться в одном направлении. Если вы поменяете полярность источника питания, двигатель постоянного тока будет вращаться в противоположном направлении. Это важно отметить.


ДРВ8837
+ - - +
 DRV8837 представляет собой двухканальную микросхему с моторным приводом. Вы можете использовать его для управления однонаправленным двигателем постоянного тока с 2 портами или двунаправленным двигателем постоянного тока с 1 портом.
DRV8837 представляет собой двухканальную микросхему с моторным приводом. Вы можете использовать его для управления однонаправленным двигателем постоянного тока с 2 портами или двунаправленным двигателем постоянного тока с 1 портом.Описание порта модуля DRV8837 выглядит следующим образом:
-
Имя контакта
Пин код
Описание
ВМ
1
Электропитание двигателя
Выход х
2,3
Чип управления выходом: определите состояние выхода в соответствии с входным сигналом In x
ЗАЗЕМЛЕНИЕ
4
Отрицательный полюс
В х
5,6
Входной управляющий сигнал
RU
5
Сигнал включения чипа, действительный на высоком уровне
ВКК
6
Питание логики 3,3 В или 5 В
Для получения более подробной информации см. техническое описание.
При использовании DRV8837 для управления двигателем постоянного тока обычно используются два типа подключения.
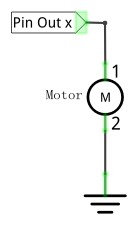
В следующем варианте подключения используется один канал DRV8837, который может управлять скоростью двигателя с помощью ШИМ, однако в этом случае двигатель может вращаться только в
одном направлении.
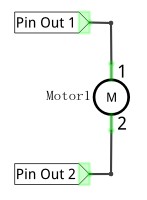
Следующее соединение использует два канала DRV8837: один канал выводит волну ШИМ, а другой канал подключается к GND. Таким образом, вы можете контролировать скорость двигателя. Когда эти два канала обмениваются сигналами, не только контролируется скорость двигателя, но также может контролироваться направление вращения двигателя.
 ШИМ ЗАЗЕМЛЕНИЕ
ШИМ ЗАЗЕМЛЕНИЕ

ЗАЗЕМЛЕНИЕ ШИМ
Схема
Используйте контакт A1 платы управления для определения напряжения поворотного потенциометра; контакт 9 и контакт 10 для управления направлением и скоростью вращения двигателя.
| Принципиальная схема 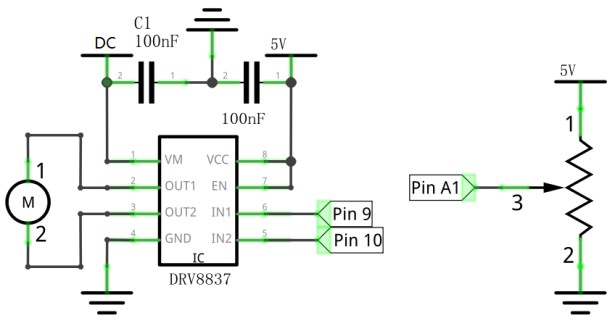 | Аппаратное соединение   |
| Аппаратное соединение Нажмите переключатель для питания для мотора. | |
Эскиз
Control_Motor
Теперь напишите код для управления скоростью и направлением вращения двигателя с помощью поворотного потенциометра. Когда потенциометр остается в среднем положении, скорость двигателя минимальна; При отклонении от среднего положения скорость увеличится. Кроме того, если потенциометр отклоняется от среднего положения потенциометра по часовой стрелке или против часовой стрелки, направление вращения двигателя отличается.

В коде мы пишем функцию для управления мотором и управления скоростью и направлением через два
параметра.
В функции цикла () определите цифровое значение поворотного потенциометра и преобразуйте его в скорость и
направление двигателя путем расчета.
| абс (х) | |
| Вычисляет абсолютное значение числа. | |
Проверьте и загрузите код, поверните вал поворотного потенциометра, после чего вы увидите изменение скорости и
направления двигателя.
Глава 11 Сервопривод
Ранее мы использовали плату управления и модуль L293D для управления скоростью и направлением двигателя. Теперь мы будем использовать другой двигатель, сервопривод, который может вращаться на определенный угол.
Во-первых, давайте заставим сервопривод вращаться.
Список компонентов
-
Плата управления x1
USB-кабель x1
Совет по проектам Freenove
Знание компонентов
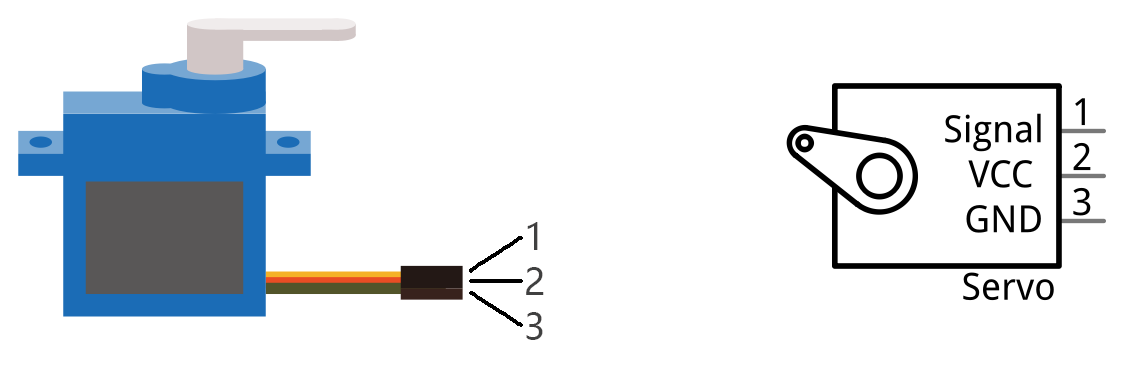
Сервопривод
Сервопривод представляет собой компактный блок, состоящий из двигателя постоянного тока, набора редукторов для обеспечения крутящего момента, датчика и платы управления. Большинство сервоприводов имеют только 180-градусный диапазон движения через свой «рог». Сервоприводы могут выдавать более высокий крутящий момент, чем один простой двигатель постоянного тока, и они широко используются для управления движением в моделях автомобилей, моделей самолетов, роботов и т. Д. Сервоприводы имеют три провода, которые обычно заканчиваются 3-контактным штекером или гнездом. Два провода предназначены для электропитания: положительный (2-VCC, красный провод), отрицательный (3-GND, коричневый провод) и сигнальная линия (1-сигнал, оранжевый провод), как показано на сервоприводе, входящем в комплект.
Мы будем использовать ШИМ-сигнал частотой 50 Гц с