Файл: Ledpixel Связанные знания Светодиодный модуль Freenove 8 rgb.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 119
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
рабочим циклом в определенном диапазоне для управления сервоприводом. Продолжительность 0,5-2,5 мс высокого уровня одиночного цикла ШИМ соответствует углу сервопривода от 0 до 180 градусов линейно. Часть соответствующих значений выглядит следующим образом:
Когда вы измените сигнал сервопривода, сервопривод повернется в назначенное положение.
Схема
Используйте контакт 3 платы управления для управления сервоприводом.
Обратите внимание на цвет провода сервопривода: VCC (красный), GND (коричневый) и сигнальной линии (оранжевый). Неправильное подключение может привести к повреждению сервопривода.
Servo_Sweep
Теперь напишите код для управления сервоприводом, чтобы он непрерывно вращался в диапазоне движения.
Servo использует библиотеку Servo, например следующую ссылку на библиотеку Servo:

Библиотека Servo предоставляет класс Servo, который ею управляет. В отличие от предыдущего класса Serial, класс Servo должен быть
создан перед использованием:
Приведенный выше код определяет объект типа Servo, myservo.
После определения объекта Servo вы можете ссылаться на функции, такие как инициализация сервопривода:

После инициализации сервопривода вы можете управлять сервоприводом для поворота
на определенный угол:
В функции loop() мы используем цикл для управления поворотом сервопривода от 0 градусов до 180 градусов, а затем от
180 градусов до 0 градусов, затем цикл повторяется все время. Проверьте и загрузите код, сервопривод начнет работать непрерывно.


В предыдущем разделе мы сделали сервопривод непрерывным. Теперь мы будем использовать потенциометр для управления углом сервопривода.
Список компонентов
Схема
Используйте контакт A1 платы управления для определения напряжения поворотного потенциометра и контакт 3 для управления сервоприводом.
Control_Servo_by_Potentiometer
Теперь напишите код для определения напряжения поворотного потенциометра и управления сервоприводом для поворота на другой угол соответственно.
В коде мы получаем значение АЦП контакта A1 и сопоставляем его с углом сервопривода.
Проверьте и загрузите код, поверните вал потенциометра, после чего сервопривод повернется на соответствующий угол.
Глава 12 Датчик температуры
Ранее мы использовали плату управления и фоторезистор для определения интенсивности света. Теперь мы научимся пользоваться датчиком температуры.

Мы будем использовать термистор для определения температуры окружающей среды.
Список компонентов
Знание компонентов
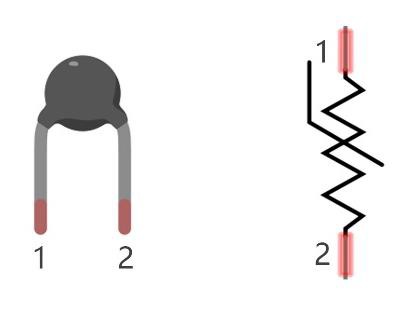
Термистор
Термистор представляет собой термочувствительный резистор. Когда он чувствует изменение температуры, сопротивление термистора будет меняться. Мы можем воспользоваться этой характеристикой, используя термистор для определения интенсивности температуры. Термистор и его электронный символ показаны ниже.
Соотношение между значением сопротивления и температурой термистора:
Rt=R*EXP[B*(1/T2-1/T1)]
Где:
Rt – сопротивление термистора при температуре Т2;
R – номинальное сопротивление термистора при температуре Т1; EXP[n] — энная степень числа e;
B для теплового индекса;
T1, T2 – температура Кельвина (абсолютная температура). Температура Кельвина = 273,15 + температура по Цельсию. Параметры используемого термистора: B=3950, R=10k, T1=25.
Способ подключения термистора аналогичен фоторезистору, а именно:
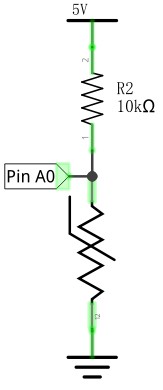
Мы можем использовать значение, измеренное аналоговым контактом платы управления, чтобы получить значение сопротивления термистора, а затем мы можем использовать формулу для получения значения температуры.
Схема
Используйте контакт A0 на плате управления для определения напряжения термистора.
-
Время высокого уровня
Угол сервопривода
0,5 мс
0 градусов
1 мс
45 градусов
1,5 мс
90 градусов
2 мс
135 градусов
2,5 мс
180 градусов
Когда вы измените сигнал сервопривода, сервопривод повернется в назначенное положение.
Схема
Используйте контакт 3 платы управления для управления сервоприводом.
Обратите внимание на цвет провода сервопривода: VCC (красный), GND (коричневый) и сигнальной линии (оранжевый). Неправильное подключение может привести к повреждению сервопривода.
Эскиз
Servo_Sweep
Теперь напишите код для управления сервоприводом, чтобы он непрерывно вращался в диапазоне движения.
Servo использует библиотеку Servo, например следующую ссылку на библиотеку Servo:
Библиотека Servo предоставляет класс Servo, который ею управляет. В отличие от предыдущего класса Serial, класс Servo должен быть
создан перед использованием:
Приведенный выше код определяет объект типа Servo, myservo.
-
Класс сервоприводов
Класс Servo должен быть инстанцирован при использовании, то есть должен быть определен объект типа Servo,
например:
сервопривод;
Большинство других плат могут определять 12 объектов типа Servo, а именно могут управлять до 12 сервоприводов. Функция, обычно используемая в классе сервоприводов, выглядит следующим образом:
myservo.attach(pin): Инициализировать сервопривод, параметр — это порт, подключенный к сигнальной линии сервопривода; myservo.write(angle): управлять сервоприводом для поворота на указанный угол; Параметр здесь должен указать угол.
После определения объекта Servo вы можете ссылаться на функции, такие как инициализация сервопривода:
После инициализации сервопривода вы можете управлять сервоприводом для поворота
на определенный угол:
В функции loop() мы используем цикл для управления поворотом сервопривода от 0 градусов до 180 градусов, а затем от
180 градусов до 0 градусов, затем цикл повторяется все время. Проверьте и загрузите код, сервопривод начнет работать непрерывно.
В предыдущем разделе мы сделали сервопривод непрерывным. Теперь мы будем использовать потенциометр для управления углом сервопривода.
Список компонентов
| Плата управления x1  | USB-кабель x1  |  |
| Совет по проектам Freenove  | ||
Схема
Используйте контакт A1 платы управления для определения напряжения поворотного потенциометра и контакт 3 для управления сервоприводом.
-
Принципиальная схема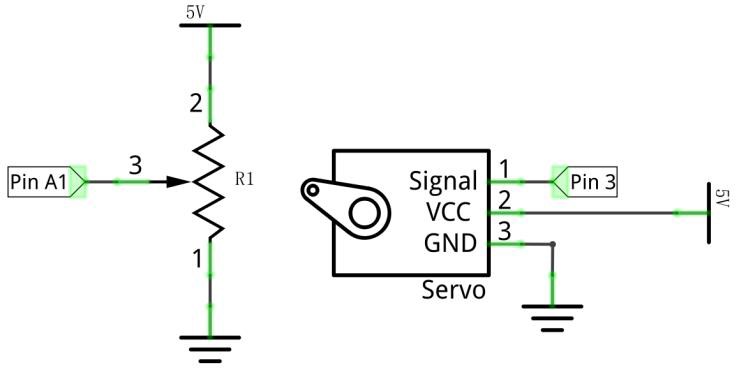
Аппаратное соединение
Аппаратное соединение
Эскиз
Control_Servo_by_Potentiometer
Теперь напишите код для определения напряжения поворотного потенциометра и управления сервоприводом для поворота на другой угол соответственно.
В коде мы получаем значение АЦП контакта A1 и сопоставляем его с углом сервопривода.
Проверьте и загрузите код, поверните вал потенциометра, после чего сервопривод повернется на соответствующий угол.
Глава 12 Датчик температуры
Ранее мы использовали плату управления и фоторезистор для определения интенсивности света. Теперь мы научимся пользоваться датчиком температуры.
Мы будем использовать термистор для определения температуры окружающей среды.
Список компонентов
-
Плата управления x1
USB-кабель x1
Совет по проектам Freenove
Знание компонентов
Термистор
Термистор представляет собой термочувствительный резистор. Когда он чувствует изменение температуры, сопротивление термистора будет меняться. Мы можем воспользоваться этой характеристикой, используя термистор для определения интенсивности температуры. Термистор и его электронный символ показаны ниже.
Соотношение между значением сопротивления и температурой термистора:
Rt=R*EXP[B*(1/T2-1/T1)]
Где:
Rt – сопротивление термистора при температуре Т2;
R – номинальное сопротивление термистора при температуре Т1; EXP[n] — энная степень числа e;
B для теплового индекса;
T1, T2 – температура Кельвина (абсолютная температура). Температура Кельвина = 273,15 + температура по Цельсию. Параметры используемого термистора: B=3950, R=10k, T1=25.
Способ подключения термистора аналогичен фоторезистору, а именно:
Мы можем использовать значение, измеренное аналоговым контактом платы управления, чтобы получить значение сопротивления термистора, а затем мы можем использовать формулу для получения значения температуры.
Схема
Используйте контакт A0 на плате управления для определения напряжения термистора.
-
Принципиальная схема
Аппаратное соединение
Аппаратное соединение