Файл: Лабораторная работа 3 по дисциплине Теория автоматического управления.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 02.12.2023
Просмотров: 94
Скачиваний: 8
| Выполнил: : | | ||||
| студент гр. 5А06 | | | Ерохонов Айастан Алексеевич | | 16.04.2023 |
| | | | | | |
| Проверил: | | ||||
| Кандидат технических наук | | | Ляпунов Данил Юрьевич | | |
| | | | | | |
= 18 А; Jд = 0,065 кг.м 2 ; Rя = 0,376 Ом; Lя = 0,004 Гн; nном = 2500 об/мин.
Согласно паспортным данным передаточная функция двигателя в числовом выражении имеет вид:
Параметры ЭМУ определяются также по паспортным данным, которые имеют следующие значения для ЭМУ-50А3
Рэму = 4 кВт; Uэму = 230 В; Iвх = 10 мА; rвх = 2100 Ом; Lвх = 100 Гн; r1 = 3,35 Ом; L1 = 0,6 Гн.
Передаточную функцию ЭМУ соответственно приведенным паспортным данным можно представить как:
где Кэму = uэму/Iвхrвх ≅ 11; Тэму = L1/r1 = 0,178 с; Твх = Lвх/rвх = 0,0478 с
Коэффициент передачи тахогенератора BR kос = 0,1.
Выполнения работы
-
Исследование системы при передаточной функции Wk(s) = 1.
-
Исследование системы с дифференцирующим устройством
Рис.5. Структурная схема исследуемой системы с дифференцирующим устройством 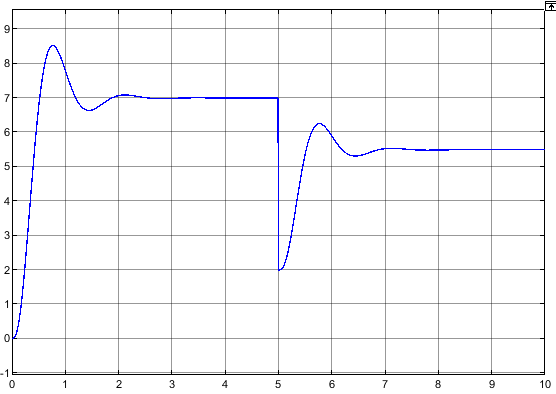
Рис.6. График переходной характеристики
По рис.6. видно явное преимущество схемы с дифференцирующим устройством в виде малого времени регулирование  . Но, само установившийся состояние уменьшилось (
. Но, само установившийся состояние уменьшилось ( , а также увеличилась статическая ошибка (
, а также увеличилась статическая ошибка ( по сравнению с предыдущей схемой. То есть, данная система быстро возвращается в установившийся режим, но при возмущении сильно проседает.
по сравнению с предыдущей схемой. То есть, данная система быстро возвращается в установившийся режим, но при возмущении сильно проседает.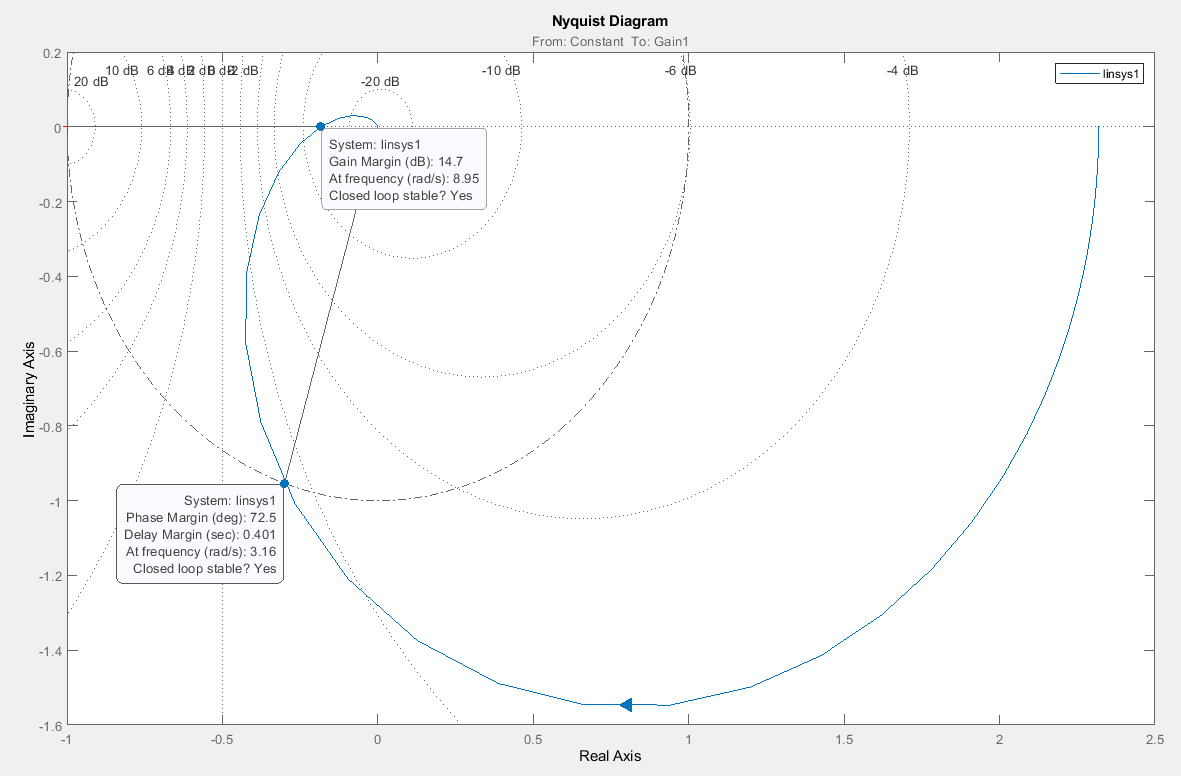
Рис.7. Кривая Найквиста 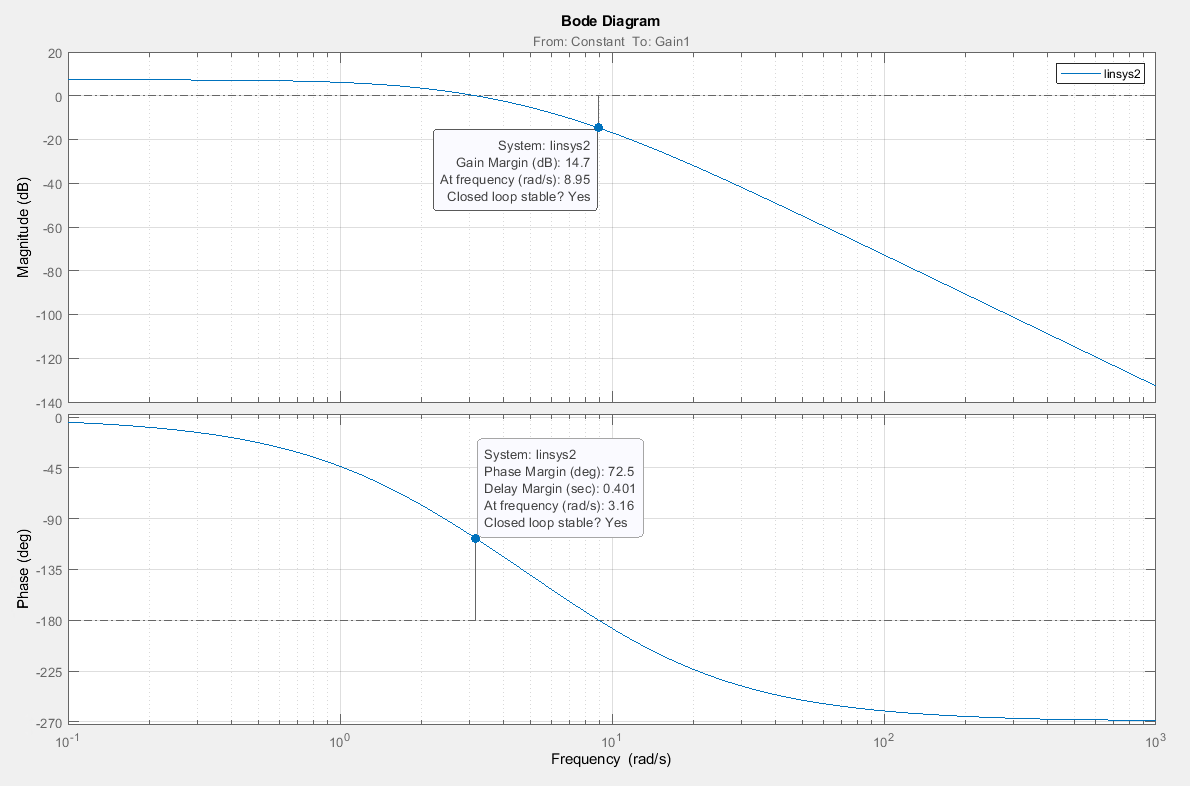
Рис.8. ЛАЧХ и ЛФЧХ
Другое преимущество данной системы – это его запас по амплитуде и по фазе ( ). Систему с дифференцирующим устройством сложнее вывести из устойчивости.
). Систему с дифференцирующим устройством сложнее вывести из устойчивости.
-
Исследование системы с интегрирующим устройством
В итоге можно сделать вывод, что любое корректирующее устройство имеет свои преимущества и недостатки, и поэтому для их эффективного использование необходимо знать требовании эксплуатации самой системы.Ниже приведены результаты оценок систем с устройствами коррекции.
| | Без корректирующих устройств | с дифференцирующим устройством | с интегрирующим устройством |
| Установившийся состояние  | 8 | 7 | 9 |
| Статическая ошибка  | 0,8 | 1,5 | 0 |
| Время регулирование  | 3,4 | 1,6 | 3,8 |
| Запас по амплитуде  , дб , дб | 6,5 | 14,7 | 6,26 |
| Запас по фазе  | 28,2 | 72,5 | 27 |