Файл: Отчет по производственной практике (научноисследовательская работа).docx
Добавлен: 03.12.2023
Просмотров: 30
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Южно-российский государственный
ПОЛИтехнический университет
(нПИ) имени М.И. Платова»


Механический
МиГПА
15.03.06 Мехатроника и робототехника,
направленность «Мехатроника»
факультет ___________________________________________________
кафедра ___________________________________________________
НАПРАВЛЕНИЕ ___________________________________________________
ОТЧЕТ
ПО производственной практике
(научно-исследовательская работа)
студента 2 курса группы 150306-Ма-о19
Бесхлебнова В.В.
«Мехатронный модуль автопилота в системе управления летательным аппаратом»
Руководитель Оценка ____________
Зав. каф. МиГПА, д.т.н. Шошиашвили М.Э. «___» ______ _______
Должность, звание Фамилия, имя, отчество Дата Подпись
Новочеркасск 2021 г.
ВВДЕНИЕ
Из всех режимов полета летательных аппаратов (ЛА) наиболее сложным и напряженным является режим захода на посадку и непосредственно посадки. Связано это, в первую очередь, с большой степенью аварийности ЛА на этом режиме, вследствие быстротечности процесса посадки и очень высокой нервно-психологической нагрузки экипажа. Данный режим имеет достаточно высокую скоротечность и требует от экипажа уверенных, слаженных действий, быстрой реакции на происходящие изменения. Время на заход на посадку и посадку занимает не более 1-2% всего времени полета, однако на этот режим приходится более 50% всех авиационных происшествий. За последние 40 лет на этот режим пришлось около 55% всех потерь. Трудности управления особенно возрастают в условиях плохой видимости (туман, темнота), когда зрительное ориентирование затруднено или невозможно.
Реализация автоматической посадки ЛА представляет еще более сложную задачу. В этом случае, вместо летчика бортовая система управления должна решать задачи планирования действий, оценки текущего состояния и управления исполнительными органами. При этом система управления (СУ) должна обеспечивать устойчивость, малое время отработки больших отклонений, адаптивность к воздействию возмущений и точность выхода в заданную точку приземления.
ОПИСАНИЕ ПАТЕНТА
Изобретение[1] относится к области авиации, в частности к системам посадки летательных аппаратов, и предназначено для обеспечения визуальной пространственной ориентации пилота при заходе на посадку в условиях ограниченной видимости.
Лазерная система посадки летательных аппаратов содержит курсовой, глиссадные,боковые и маркерные лазерные излучатели, расположенные определенным образом на взлетно-посадочной полосе (ВПП). Лучи каждого маркерного излучателя направлены под небольшим углом к плоскости глиссады и пересекают плоскость глиссады вблизи боковой границы посадочного коридора над маркерной точкой. Лучи маркерных излучателей отличаются спектральным составом от глиссадных и курсового излучателей и выполнены с возможностью амплитудной модуляции мощности излучения, доступной для зрения в целях различия индикации маркерных точек в зависимости от их удаления от порога ВПП. Обеспечивается точность ориентации летательного аппарата при движении по глиссаде.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью изобретения является уменьшение времени на анализ положения ЛА, снижение вероятности ошибок в процессе ориентации и, как следствие, улучшение эргономических характеристик лазерной системы посадки летательных аппаратов при ориентации по лазерным лучам.
Поставленная цель достигается тем, что в заявленной лазерной системе посадки летательных аппаратов луч маркерного лазерного излучателя проходит вблизи границы посадочного коридора и его проекция не затрудняет ориентацию пилота по курсу и глиссаде.
Лазерная система посадки летательных аппаратов отличается от известного технического решения, содержащего: курсовой лазерный излучатель, установленный на осевой линии ВПП перед порогом ВПП; глиссадные лазерные излучатели, установленные с внешней стороны боковых границ ВПП на расстоянии (200…450) м от порога ВПП; боковые излучатели, установленные вблизи боковых границ у дальнего торца ВПП и обозначающие боковые границы ВПП; маркерные лазерные излучатели, формирующие лучи для индикации маркерных точек, тем, что луч каждого маркерного лазерного излучателя, соответствующего определенной маркерной точке, направлен под небольшим углом к плоскости глиссады, при этом точка пересечения луча с плоскостью глиссады расположена над линией, проходящей параллельно порогу ВПП через эту маркерную точку.
Первое дополнительное отличие состоит в том, что точки пересечения лучей маркерных лазерных излучателей с плоскостью глиссады расположены вблизи боковой границы посадочного коридора.
Второе дополнительное отличие состоит в том, что маркерные лазерные излучатели расположены вблизи глиссадного излучателя на некотором расстоянии от него.
Третье дополнительное отличие состоит в том, что лучи маркерных лазерных излучателей отличаются от лучей курсового и глиссадных лазерных излучателей спектральным составом (цветом) лучей.
Четвертое дополнительное отличие состоит в том, что маркерные лазерные излучатели выполнены с возможностью амплитудной модуляции мощности излучения с частотой, доступной для индикации органами зрения.
Пятое дополнительное отличие состоит в том, что частота амплитудной модуляции мощности излучения лазерного излучателя для индикации конкретной маркерной точки соответствует заданному удалению конкретной маркерной точки от порога ВПП.
Сущность изобретения поясняется фиг. 1 и фиг.2.
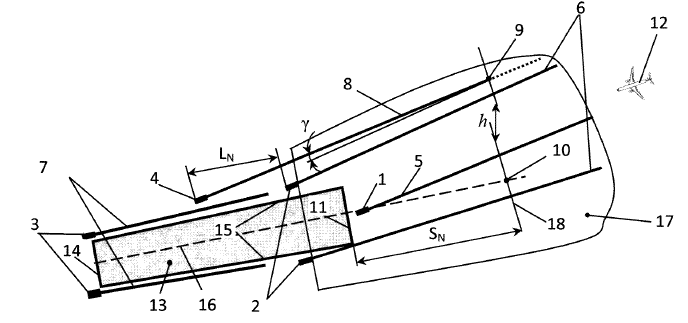
Фиг. 1 схема расположения на ВПП лазерных излучателей с указанием направления распространения их лучей.
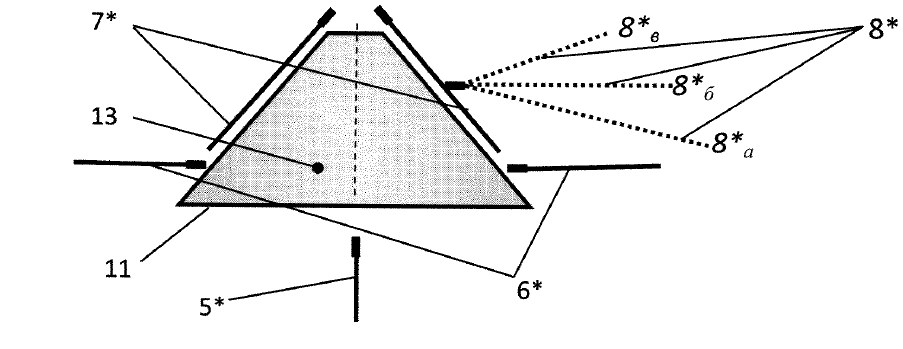
Фиг. 2 видимые пилотом проекции лазерных лучей на различных удалениях ЛА от маркерной точки.
Перечень элементов:
1,2,3,4 – лазерные излучатели
5 – курсовой излучатель
5* – проекция курсового луча
6 – глиссадный излучатель
6* - проекция глассадного луча
7 – боковой излучатель
7* - проекция бокового луча
8 – проекции луча
10 – маркерная точка
ПРИНЦИП ДЕЙСТВИЯ
Проекции курсового (5*), глиссадных (6*) и боковых (7*) лучей во время снижения ЛА в плоскости глиссады и по заданному курсу имеют положение, указанное на фиг. 2. Ориентация пилота по глиссаде и курсу выполняется известным способом [2]. В то же время пилот визуально по положению проекции луча 8 (проекции 8*а, 8*б, 8*в - фиг. 2) оценивает удаление ЛА (12) от маркерной точки (10) и фиксирует момент прохождения ЛА над ней. При приближении к маркерной точке (10) и после ее прохождения проекция маркерного луча (8*) изменяет свой вид: при приближении ЛА к маркерной точке проекция маркерного луча имеет вид (8*а), в момент пересечения ЛА маркерной точки проекция маркерного луча (8*б) - горизонтальна, а после пересечения ЛА маркерной точки проекция луча имеет вид (8*в). Как видно из
фиг. 2, проекции лазерного луча (8*) маркерного излучателя (4) всегда расположены сбоку от проекций глиссадных (6*), курсового (5*) и боковых (7*) лучей и не мешают пилоту ЛА ориентации по глиссаде и курсу. Момент пересечения ЛА маркерной точки (10) пилот определяет по горизонтальному положению проекции луча 8* (проекция 8*б) маркерного излучателя. Спектральный состав (цвет) излучения маркерного лазерного излучателя (4) отличается от цвета курсового (5) и глиссадных (6) излучателей, что улучшает идентификацию проекции (8*) луча маркерного лазерного излучателя (4). Кроме того, маркерный лазерный излучатель (4) выполнен с возможностью амплитудной модуляции мощности излучения с частотой, доступной для индикации органами зрения. Из-за спектрального состава и выполнения модуляции излучения лазерного излучателя (4) обеспечивается его отличие от излучателей (1, 2, 3) и тем самым улучшается индикация маркерной точки.
АНАЛИЗ ПРИНЦИПА РАБОТЫ ЛАЗЕРНОЙ КУРСОГЛИССАДНОЙ СИСТЕМЫ ПОСАДКИ
Одним из наиболее эффективных путей повышения безопасности заключительного этапа любого полета, независимо от класса и принадлежности ВС, является применение визуальных лазерных курсоглиссадных систем посадки, разработанных на основе современных технологий с использованием новейшей элементной базы отечественного производства.
Преимущества лазерного излучения, определяющие предпочтительность его использования в средствах визуальной навигации по сравнению с традиционными источниками света на электрических лампах, хорошо известны:
-
высокая спектральная яркость обеспечивает большую дальность видимости днем, в сумерках и при неблагоприятных условиях;
-
малая угловая расходимость пучка излучения обеспечивает требуемую точность зрительной ориентации.
Прямое лазерное излучение обладает повышенной проницаемостью через поглощающие и рассеивающие среды (туман, дождь, снегопад, плотная дымка) по сравнению с обычными источниками света. Дальность обнаружения такого излучения превышает метеорологическую дальность видимости (МДВ) более чем в 3–4 раза, а дальность обнаружения огней высокой интенсивности систем посадки, применяемых в современных аэропортах, не менее чем в два раза. Система посадки летательных аппаратов содержит дальнюю и ближнюю приводные радиостанции, глиссадные и курсовой лазерные излучатели, N-пар оптических излучателей, распределенных между курсовым лазерным излучателем и ближней приводной радиостанцией. стемам аэродромов и предназначено для обеспечения пространственной ориентации.
Излучатели каждой пары расположены симметрично оси взлетно-посадочной полосы, а их оптические лучи находятся в плоскости, перпендикулярной к курсовому лазерному лучу, и пересекаются в точке на его оси. Оптические излучатели в каждой паре выполнены с возможностью пространственного сканирования, амплитудной модуляции мощности излучения и изменения спектрального состава (цвета). Пространственные и оптические параметры излучателей управляются по заранее заданному алгоритму с помощью функционально связанного контроллера и блока управления. Достигается повышение надежности, увеличение дальности визуальной ориентации пилота по глиссаде, повышение информативности, эффективности, безопасности при посадке в сложных метеоусловиях.
В ВУНЦ создан опытный образец монокулярной системы технического зрения (СТЗ) [3], структурная схема которого изображена на рис. 1.
Система включает в себя комплект из трех наземных лазерных инфракрасных маяков (ИК-ориентиров) диапазона 1,55 мкм, размещаемых вдоль ВПП, бортовую цифровую видеокамеру диапазона 0.9…1,7 мкм с вариообъективом и узкополосный (1,55 мкм) фильтр, установленные на трехстепенном гиростабилизированном управляемом подвесе. СТЗ БЛА обеспечивает автоматический заход на посадку до высоты H = 0.
Разработанное алгоритмическое обеспечение в бортовом вычислителе позволяет осуществлять поиск, захват, распознавание и сопровождение ИК-ориентиров, вычисление угловых и линейных координат самолета относительно ВПП и формирование заданных значений рассогласования этих координат от линии глиссады в автопилот БЛА для формирование заданных значений рассогласования этих координат от линии глиссады в автопилот БЛА для формирования в нем управляющих воздействий.
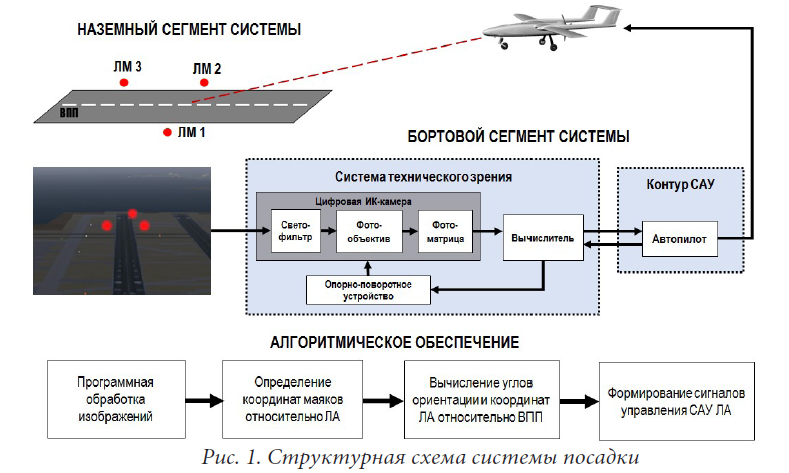
Программная обработка изображений осуществляется с целью определения координат маяков на фотоматрице. Особенностью этой задачи является ее навигационная направленность, и поэтому требования к минимизации погрешностей измерения достаточно высоки.
Значительные флуктуации функции яркости изображения, обусловленные шумами фотоматрицы существенно ухудшают метрологические возможности системы технического зрения. Естественным путем решения этой проблемы является обработка изображения, основанная на использовании статистических методов. Поиск особых точек изображения с субпиксельной точностью, в нашем случае – изображений лазерных маяков, необходимых для решения задачи навигации осуществляют как правило посредством метода наименьших квадратов, либо корреляционного подхода [4]. Однако, эти методы требуют значительных вычислительных ресурсов, поэтому реализован весьма простой, но эффективный подход, основанный на определении центра функции яркости изображения маяка. Центр функции яркости изображения метки определяется подобно тому, как вычисляется центр массы объемного тела [5]. Определение границы изображения маяка выполняется путем его бинаризации, причем в качестве порогового значения выбирается величина определяемая следующим образом