Файл: Отчет по производственной практике (научноисследовательская работа).docx
Добавлен: 03.12.2023
Просмотров: 31
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Исследованиями установлено, что наиболее быструю сходимость обеспечивает метод последовательных приближений. При использовании разработанной процедуры определения нулевого приближения уже в первом приближении достигается погрешность не хуже 0,05 %, что вполне приемлемо для бортового алгоритма.
Масса комплекта бортовой части СТЗ не превышает 2 кг, что допускает их установку даже на борту БЛА малого класса (с максимальной взлетной массой до 10 кг). Возможно использование в качестве СТЗ видеокамер целевых нагрузок БЛА, используемых по целевому назначению на других этапах полета.
Наземная часть системы дополняется устройствами автоматического управления диаграммой направленности излучения, регулирования мощности источников излучения и слежения за созвездием маяков [6], а также импульсной модуляцией их излучения, что значительно расширяет ее возможности по дальности и метеоустойчивости.
Функционирование системы посадки основано на алгоритме, включающем распознавание изображений маяков, субпиксельное определение их координат на фотоматрице видеокамеры, решение системы нелинейных уравнений относительно трех линейных и трех угловых координат положения ЛА. Численное дифференцирование этих координат обеспечивает автономное функционирование системы автоматического управления на этапе посадки без использования дополнительных датчиков информации.
При исследовании особенностей функционирования системы технического зрения проводилось имитационное моделирование, в основу которого была положена математическая модель динамики полета ЛА, интегрированная с бортовым автопилотом ЛА и авиационным инженерным симулятором, для отображения визуального представления зоны захода на посадку и модели ВПП с маяками красного цвета, отличающимися от подстилающей поверхности и близлежащих объектов.
Результаты имитационного моделирования показаны на рис. 2.
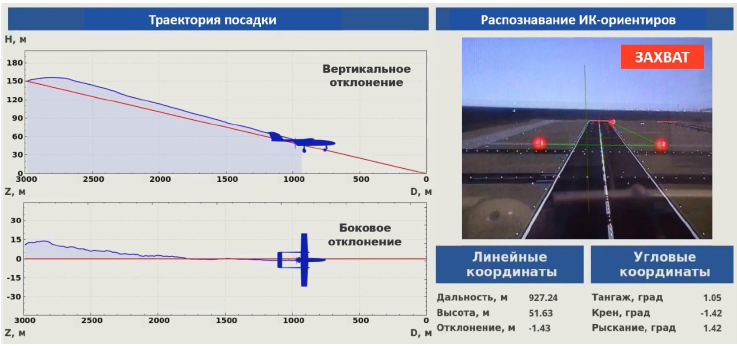
Рис. 2. Результаты полунатурного моделирования СТЗ с заходом на посадку с дальности D = 3000 м, высоты H = 150 м
Математическая модель динамики полета формирует параметры движения ЛА, передает эти данные бортовому автопилоту. Многофункциональная оптико-электронная система фиксирует положение маяков на экране, вычисляет линейные и угловые координаты положения ЛА относительно ВПП, передает эти данные бортовому автопилоту. Бортовой автопилот в соответствии с заложенным законом управления ведет самолет по глиссаде на посадку.
С использованием данного метода удалось скорректировать алгоритмы распознавания изображений и определения координат, отладить работоспособность системы с бортовым автопилотом, провести цикл исследований по отработке автоматического захода на посадку с различных дальностей, в том числе оценить влияние различных условий визуальной видимости (день, ночь, туман, снег, дождь) [7], а также турбулентности атмосферы и бокового ветра [8]. Проведенное полунатурное моделирование позволило отработать различные варианты захода на посадку с использованием СТЗ, в том числе и в полностью автономном режиме по линейным и угловым координатам, полученным только от системы технического зрения.
Для полноценного решения задачи управления полетом ЛА в режиме обеспечения посадки до высоты 0 H = разработан алгоритм автоматического управления, обеспечивающий выдерживание параметров посадки с заданной точностью. В основу алгоритма автоматического управления положены принципы: иерархического многоуровневого деления полётного задания на этапы полёта, участки и фазы; разделения каналов непрерывного и дискретного управления [9].
На основании сформированных заданного путевого угла, заданного наклона траектории и заданной программы управления по скорости с учётом существующих ограничений формируется закон управления в терминах заданного крена и перегрузки, являющийся основой для работы модели штатной САУ ЛА. В продольном канале работа САУ на посадочном режиме построена на выдерживании заданного значения угла тангажа посредством рулей высоты и изменением тяги двигателя. Для управления боковым движением БЛА на этапе посадки используются аэродинамический руль направления и многосекционные элероны.
Н
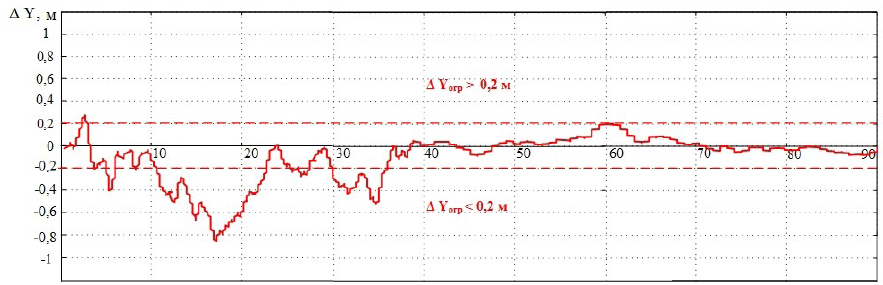 а основе полученных законов управления и рассчитанной математической модели движения БЛА на режиме посадки было проведено численное моделирование, где исследовались ошибки отклонения от заданных параметров регулирования, представленные на рис. 3 и 4.
а основе полученных законов управления и рассчитанной математической модели движения БЛА на режиме посадки было проведено численное моделирование, где исследовались ошибки отклонения от заданных параметров регулирования, представленные на рис. 3 и 4.
Рис. 3 Ошибки регулирования по вертикальному ΔY отклонению
при влиянии турбулентности ветра ( V 2 σ = м/с, L = 300 м)
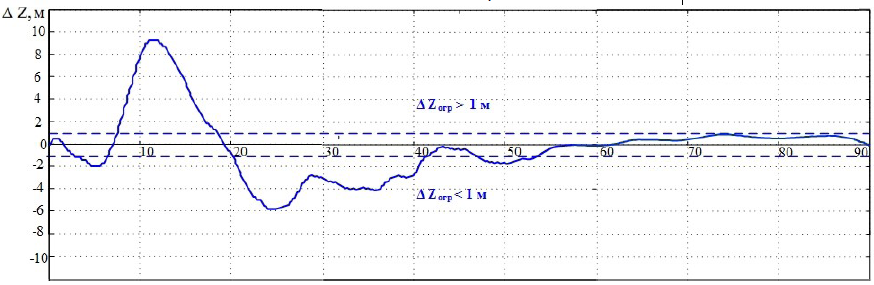 Рис. 4 Ошибки регулирования по боковому ΔZ отклонению при влиянии турбулентности ветра ( V 2 σ = м/с, L = 300 м)
Рис. 4 Ошибки регулирования по боковому ΔZ отклонению при влиянии турбулентности ветра ( V 2 σ = м/с, L = 300 м)Полученные результаты моделирования показывают, что точность измерения и регулирования параметров посадки достаточна для решения задачи выполнения автоматической посадки с применением разработанного алгоритмического обеспечения.
Исследованиями установлено, что доминирующими являются погрешности дискретизации, поэтому приведем соотношения, описывающие эти погрешности измерения линейных и угловых координат ЛА.
Предел абсолютной погрешности измерения высоты
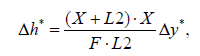
где Δу*– погрешность измерения расстояния между изображениями на фотоматрице, 2 L– расстояние между маяками, F – фокусное расстояние объектива, X – дальность, расстояние от фронтально расположенных маяков до ЛА.
Предел абсолютной погрешности измерения дальности
где Δz*− погрешности измерения расстояния между изображениями на фотоматрице.
Погрешности измерения расстояния между изображениями маяков на фотоматрице определяются размером пиксела при попиксельной обработке изображения, а при субпиксельной обработке они зависят от метода обработки и снижаются примерно на порядок.
Графики погрешностей измерения высоты, дальности в зависимости от дальности для диапазона 0…500 м, позволяющие оценить потенциальные точностные возможности используемого подхода в момент посадки, изображены на рис. 5.
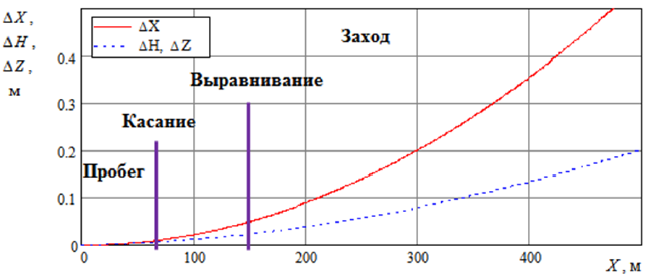
Рис. 5 Оценка точности измерения линейных координат (дальность, высота и боковое отклонение) на различной дальности от точки посадки
Приведенные графики погрешностей измерения параметров положения БЛА, полученные теоретическим путем, превосходно подтверждаются экспериментальными зависимостями, изображенные на рис. 6, публикованы китайскими разработчиками системы посадки, аналогичной по принципу действия [10].
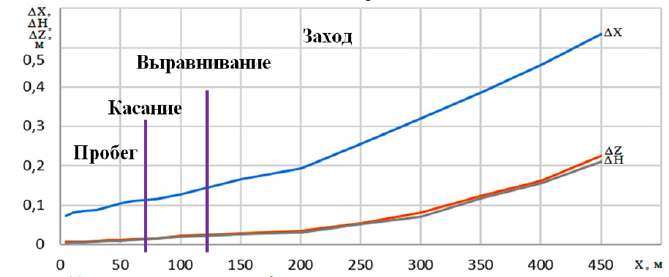
Рис. 6 Точности измерения координат в натурном эксперименте системы-аналога (Военный университет НОАК. Китай)
Существенным отличием этой системы является измерение только линейных координат, а также использование светодиодных маяков (диапазона 940 мкм).
Заключение
В результате анализа информации по данной теме, можно сделать вывод, что автоматические системы управления, как и авиастроение в целом, активно развивается в нашей стране. Однако хочется заметить, что, в отличие от зарубежных коллег, у нас больше наработок, а не готовых моделей. Поэтому правильным решением будет наращивание темпов построения изделий и проверка их в жизни.
Список используемых материалов
-
Патент RU2575554C2. ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА). Анисимов Вячеслав Иванович, Бутузов Владимир Васильевич -
Логвин А. И. Алгоритмы автоматического распознавания взлетно-посадочной полосы на видеоизображениях / А. И. Логвин, А. В. Волков // Научный вестник – М. : МГТУ ГА. 2015. – № 213. – С. 115–117. -
В. Г. Бондарев, Д. В. Лопаткин, Д. А. Смирнов. АВТОМАТИЧЕСКАЯ ПОСАДКА ЛЕТАТЕЛЬНЫХ АППАРАТОВ./ ВУНЦ ВВС «Военно-воздушная академия им. проф. Н. Е. Жуковского и Ю. А. Гагарина» (г. Воронеж) -
Басов Ю.Г. Светосигнальные устройства. - М.: Транспорт, 1993. - 309 с. -
Визильтер Ю. В. Обработка и анализ изображений в задачах машинного зрения / Ю. В. Визильтер. – М. : Физматгиз, 2010. – 249 с. -
Бронштейн И. Н. Справочник по математике для учащихся втузов / И. Н. Бронштейн, К. А. Семендяев. – М. : Наука, 1981. – 332 с -
Зеленюк Ю. И. Влияние погодных условий на надежность атмосферной оптической связи / Ю. И. Зеленюк, И. В. Огнев, С. Ю. Поляков, С. Е. Широбакин. – М. : Вестник связи, 2002. – № 4. – С. 85–97. -
Алпатов Б. А. Методы автоматического обнаружения и сопровождения объектов / Б. А. Алпатов, П. В. Бабаян, О. Е. Балашов, А. И. Степашкин. − М. : Радиотехника, 2008. – 176 с. Монография ГосНИИАС. -
Котик М. Г. Динамика взлета и посадки самолетов / М. Г. Котик – М. : Машиностроение. 1984. – 134 с. -
Yang G. Airborne Vision-Based Navigation Method for UAV Accuracy Landing Using Infrared Lamps / G. Yang. – J. Intell : Robot. Syst., 2013. – 197 p.