ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 163
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Назначение основные технические характеристики
1.2 Конструкция. Принцип работы
Рисунок 3 ФУНКЦИОНАЛЬНАЯ СХЕМА
2.3 Структурная схема регулятора
3 Выбор аппаратуры автоматического регулирования
3.2.1 Выбор уравнительного сосуда
3.2.3 Выбор регулирующего устройства
3.2.4 Выбор задающего устройства
4.1 Выбор закона регулирования
4.2 Расчет АСР на устойчивость
4.3 Расчет регулирующего органа
5 Краткое описание способа монтажа исполнительного механизма
Для реализации данной системы разработаны:
принципиальная электрическая схема;
общий вид щита автоматизации;
Оглавление
Введение 2
1 Описание ПНД-4 3
1.1 Назначение основные технические характеристики 3
1.2 Конструкция. Принцип работы 4
8
Рисунок 3 ФУНКЦИОНАЛЬНАЯ СХЕМА 8
2.3 Структурная схема регулятора 9
3 Выбор аппаратуры автоматического регулирования 11
3.1 Аппаратура ГСП 11
3.2 Выбор аппаратуры 12
3.2.1 Выбор уравнительного сосуда 12
13
3.2.2 Выбор первичного преобразователя 15
3.2.3 Выбор регулирующего устройства 15
3.2.4 Выбор задающего устройства 17
3.2.5 Выбор блока питания 19
3.2.6 Выбор тиристорного усилителя 20
3.2.7 Выбор исполнительного механизма 21
3.2.8 Выбор указателя положения вала 22
3.2.9 Выбор защитного устройства 23
4 Расчетная часть 25
4.1 Выбор закона регулирования 25
4.2 Расчет АСР на устойчивость 28
28
4.3 Расчет регулирующего органа 30
5 Краткое описание способа монтажа исполнительного механизма 39
Заключение 41
В рамках данной курсовой работы осуществлена разработка системы автоматического регулирования уровня в подогревателе низкого давления. По полученным данным осуществлен подбор требуемого оборудования и средства автоматизации, способные обеспечить равномерное и оптимальное регулирование уровня конденсата в подогревателе низкого давления. 41
Для реализации данной системы разработаны: 41
структурная схема; 41
функциональная схема; 41
принципиальная электрическая схема; 41
монтажная схема; 41
общий вид щита автоматизации; 41
заказная спецификация приборов и средств автоматизации 41
Список использованных источников 42
Введение
По оперативным данным АО «СО ЕЭС», потребление электроэнергии в Единой энергосистеме России в сентябре 2022 года составило 84,0 млрд кВт•ч, что на 0,4 % больше объема потребления за сентябрь 2021 года. Потребление электроэнергии в сентябре 2022 года в целом по России составило 85,2 млрд кВт•ч, что так же на 0,4 % больше аналогичного показателя 2021 года.
В сентябре 2022 года электростанции ЕЭС России выработали 84,6 млрд кВт•ч, что на 1,5 % меньше, чем в сентябре 2021 года. Выработка электроэнергии в России в целом в сентябре 2022 года составила 85,9 млрд кВт•ч, что так же на 1,5 % меньше выработки в сентябре прошлого года.
Основную нагрузку по обеспечению спроса на электроэнергию в ЕЭС России в сентябре 2022 года несли тепловые электростанции (ТЭС), выработка которых составила 45,5 млрд кВт•ч, что на 2,4 % больше, чем в сентябре 2021 года. Выработка ГЭС за девятый месяц 2022 года составила 14,5 млрд кВт•ч (на 17,1 % меньше уровня 2021 года), выработка АЭС – 18,4 млрд кВт•ч (на 1,4 % больше уровня 2021 года), выработка электростанций промышленных предприятий – 5,6 млрд кВт•ч (на 4,0 % больше уровня 2021 года).
Современные АЭС сложные технологические объекты. Необходимо обеспечивать их безопасную и экономическую работу. Для этого применяются современные приборы и системы управления.
В курсовом проекте рассматриваются вопросы автоматического регулирования уровня в ПНД-4 турбины К-210-130, краткое описание ПНД-4, обоснование выбора схемы автоматического регулирования, выбор места установки и функциональных признаков прибора, выбор аппаратуры измерений, выбор закона регулирования, расчёт системы на устойчивость.
1 Описание ПНД-4
1.1 Назначение основные технические характеристики
Предназначен для подогрева воды паром, частично отработавшим в турбине и отводимым от неё через регенеративные отборы к подогревателям, что обеспечивает повышение термического КПД цикла у улучшения общей экономичности установки.
Тип ПНД-4 ПН-350-16-7-1. В таблице 1 приведены основные технические характеристики ПНД-4.
Таблица 1 Основные технические характеристики ПНД-4
| Наименование параметров | Числовое значение |
| Площадь поверхности теплообмена,м² | 352 |
| Номинальный массовый расход воды, кгс/с | 159,7 |
| Расчётный тепловой поток, МВт | 24 |
| Максимальная температура, ºС | 400 |
| Гидравлическое сопротивление при номинальном расходе воды, МПа | 0,05 |
1.2 Конструкция. Принцип работы
На рисунке 1 приведена конструкция ПНД-4.
Основные узлы подогревателя – водяная камера с патрубками для подвода и отвода питательной воды, перегородками внутри неё и фланцем, трубная система из U-образной трубой, диаметром 16 мм и толщиной стенки 1 мм, концы которых за вальцованы в трубной доске ( для организации потока пара имеются направляющие промежуточные перегородки), корпус подогревателя с приваренными к нему патрубками опорными лапками и фланцами. Трубная доска с помощью шпилек закрепляется между фланцем корпуса и водяной камеры.
В подогревателе нагреваемая вода движется по теплообменным трубкам, а греющий пар поступает через пароподводящий патрубок в межтрубное пространство. Конденсат пара стекает в нижнюю часть корпуса и отводится из подогревателя через регулирующий клапан.

Рисунок 1 –ПНД:
А- вход основного конденсата; Б- выход основного конденсата; В- подвод греющего пара; Г- отвод конденсата греющего пара; Д- подвод конденсата; Е- подвод парогазовой смеси; Ж- отвод парогазовой смеси
Определение динамических характеристик объекта:
С точки зрения регулирования уровня РОУ обладает свойствами самовыравнивания поэтому его динамические свойства описываются передаточной функцией. На рисунке 2 приведена кривая разгона.
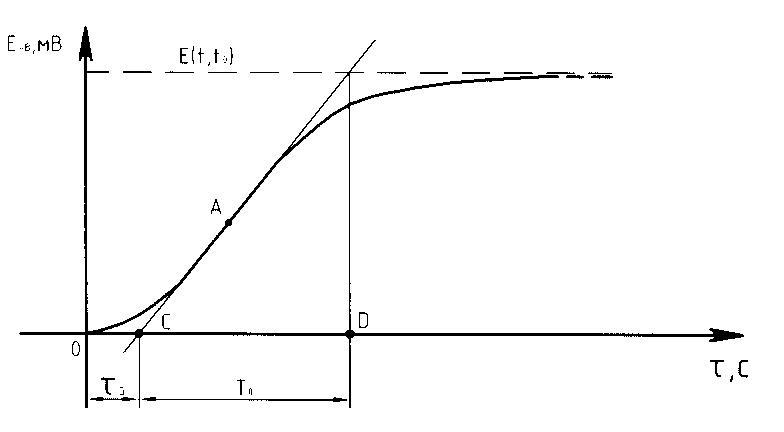
Рисунок 2 – Кривая разгона
Передаточная функция объекта регулирования имеет вид.
W₀(p)=
 e ˉᵖ ͭ
e ˉᵖ ͭгде:
К - Коэффициент усиления объекта;
Т – Постоянная времени;
t – Время запаздывания.
T= 74,23 с
t = 38,31 c
x = 4,17 c
y= 21,67 c

где:
y – Установившиеся значение выходной величины;
x – Регулирующее воздействие.
 , (1)
, (1)W₀(p)=

e ˉᵖ*³⁸⸴³ˡ , (2)
Щиты, штативы, пульты управления на функциональных схемах изображаются условно в виде прямоугольников произвольных размеров, достаточных для нанесения графических условных обозначений устанавливаемых на них приборов, средств автоматизации, аппаратуры управления и сигнализации. Комплектные устройства (машины централизованного контроля, управляющие машины, полукомплекты телемеханики и др.) обозначаются на функциональных схемах также в виде прямоугольника с указанием внутри него типа устройства.
На рисунке 3 приведена функциональная схема контроля уровня в ПНД-4.
Обоснование выбранной схемы автоматического регулирования:
Пар вводится в корпус через патрубок, конденсируется на трубах поверхности теплообмена, а некоторая часть его совместно с неконденсирующимися газами (воздухом) выводится через полукольцевую перфорированную трубу.
Повышение уровня конденсата греющего пара в подогревателях уменьшает поверхность теплообмена, что приводит к недогреву питательной воды и снижению коэффициента полезного действия энергоблока. Чрезмерно высокий уровень может привести к попаданию воды в систему отсоса паровоздушной смеси или даже к её вскипанию и забросу пароводяной смеси в проточную часть турбины и, как следствие, вызвать аварию.
Поддержание уровня конденсата в корпусе ПНД в заданных пределах осуществляется автоматическим регулятором уровня, исполнительным органом которого является регулирующий клапан, устанавливаемый на трубопроводе выхода конденсата из подогревателя.

Рисунок 3 ФУНКЦИОНАЛЬНАЯ СХЕМА
2.3 Структурная схема регулятора
ЗУ
ППР


РУ





БУ


УП
УС



ИМ



От ПНД-4 В ПНД-3
Рисунок 4 – Структурная схема регулятора
ППР – первичный преобразователь. Преобразует измеряемую величину в величину, удобную для измерения и использования.
РУ – регулирующее устройство. Вырабатывает управляющее воздействие.
ЗУ – задающее устройство. Задаёт значение регулируемого параметра.
БУ – блок управления. Позволяет переключать управление на ручное.
УС – тиристорный усилитель предназначен для управления синхронным и асинхронным электродвигателем исполнительного механизма.
ИМ – исполнительный механизм. Преобразует выходной сигнал регулятора в перемещение регулирующего органа.
УП – указатель положения вала. Измеряет положение вала.