Файл: Отчет по лабораторной работе 2 исследование временных характеристик сау по дисциплине Основы теории управления.docx
Добавлен: 04.12.2023
Просмотров: 90
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИCTEPCTBO НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИФедеральное государственное автономное образовательное учреждение высшего образования«СЕВЕРО-КАВКАЗСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»Кафедра инфокоммуникацийОтчет по лабораторной работе №2ИССЛЕДОВАНИЕ ВРЕМЕННЫХ ХАРАКТЕРИСТИК САУ по дисциплине «Основы теории управления»
Ставрополь 2022Цель: 1. Изучить динамические характеристики систем автоматического управления (САУ).2. Приобрести навыки в получении и исследовании линейных динамических моделей с использованием пакета Control System Toolbox системы Matlab.Вариант 9:
Ход работы:
Рисунок 2
n(t),…,a0(t), bm(t),…,b0(t),– коэффициенты левой и правой частей уравнения; n и m – порядки старших производных выходного и входного сигналов соответственно; t0 – момент начала функционирования системы. Если коэффициенты уравнения постоянны, система называется линейной стационарной:
| Выполнил студент группы ИВТ-б-о-20-1 |
| Колбасов В.С. « »_________2022г. |
| Подпись студента___________ |
| Работа защищена « »____________2022г. |
| Проверил Линец Г.И. ________ (подпись) |
| 6 | –8 | –7 | 0 | –6 | –3 | –1 |
| b0 | b1 | a0 | a1 | a2 | a3 | a4 |
-
Изучил теоретические сведения. -
Запустил систему MATLAB. -
Создал tf–объект, в соответствии с заданным вариантом.
-
Используя комплексную передаточную функцию составил дифференциальное уравнение, определяющее функционирование САУ.
-
По дифференциальному уравнению построил структурную схему САУ.
Рисунок 2
-
О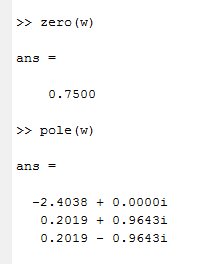
пределить полюса передаточной функции с использованием команды roots или pole. Определить нули передаточной функции
с использованием команды roots или pole. Определить нули передаточной функции  с использованием команды roots или zero.
с использованием команды roots или zero.
-
На комплексной плоскости получить расположение полюсов и нулей.
-
О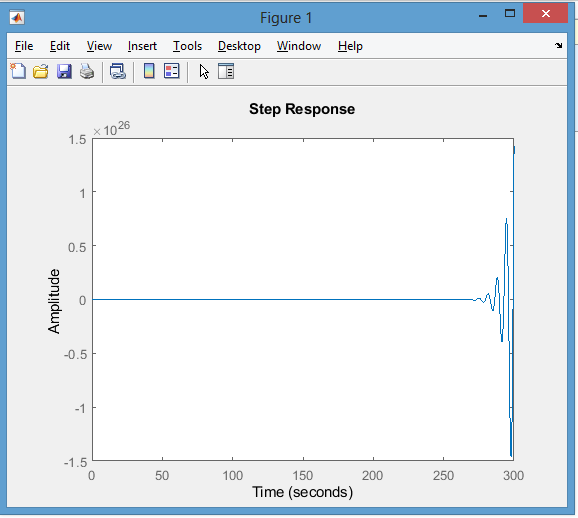
пределил переходную функцию, используя команду step(w).
-
П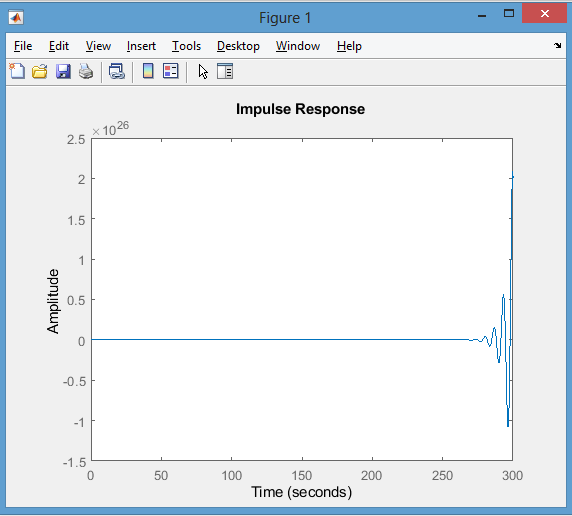
остроил импульсную переходную функцию, используя команду impulse(w).
-
В
ычислить коэффициент передачи, используя команду k=dcgain(w).
-
Как описываются непрерывные процессы, протекающие в системах управления?
-
Представьте одномерную линейную непрерывную нестационарную и стационарную системы с помощью обыкновенных дифференциальных уравнений.
n(t),…,a0(t), bm(t),…,b0(t),– коэффициенты левой и правой частей уравнения; n и m – порядки старших производных выходного и входного сигналов соответственно; t0 – момент начала функционирования системы. Если коэффициенты уравнения постоянны, система называется линейной стационарной:
-
Как изображаются стационарные системы на структурных схемах?
-
Дайте определение комплексной передаточной функции системы.
-
Как определяются нули и полюса передаточной функции?
-
Дайте определение и поясните физический смысл переходной функции.
-
Дайте определение и поясните физический смысл импульсной переходной функции.
, то реакция САУ на импульсное воздействие называется импульсной переходной функцией системы и обозначается w(t).
-
Каким образом связаны между собой переходная и импульсная переходная функции системы?
-
Как описывается единичная функция с запаздыванием? Поясните ее физический смысл.
-
Приведите спектры амплитуды и фазы единичного ступенчатого сигнала. -
Какая существует связь между переходной и весовой функциями линейных звеньев?