Файл: Расчет и выбор элементов сау автоматизированного электропривода по схеме тиристорный преобразователь двигатель.docx
Добавлен: 05.12.2023
Просмотров: 88
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Некоммерческое акционерное общество
«АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ ИМЕНИ ГУМАРБЕКА ДАУКЕЕВА»
Институт электроэнергетики и электротехники
Кафедра «Электрических машин и электропривода»
Отчет
Расчетно-графическая работа №2
По дисциплине: Электропривод
По теме: «Расчет и выбор элементов САУ автоматизированного электропривода по схеме «тиристорный преобразователь – двигатель»»
Специальность: Интеграция и управление Smart технологиями энергосбережения и энергоэффективности в электроэнергетике
Выполнил: ст. гр. ИУТЭ-20-3 Райкен М.М.
Транскрипт 204502
Проверил: доцент кафедры Мустафин М.А.
_________________ «____» ____2023год
Алматы 2023
Задание
В данных РГР проводится расчет регулируемого электропривода постоянного тока по схеме "тиристорный преобразователь – двигатель" (ТП - Д), выполняющего стабилизацию частоты вращения и ограничение пусковых токов. Основной задачей выполнения РГР является развитие навыков самостоятельной творческой работы и ознакомление с основными этапами проектирования. В результате выполнения РГР студенты должны овладеть методами расчета и выбора элементов автоматизированного электропривода, анализа и синтеза систем автоматического управления приводами, навыками использования прикладных программ по моделированию и расчету электромеханических и силовых электронных устройств различных типов на ЭВМ. Для выполнения РГР необходимо:
а) выбрать по каталогу электродвигатель, рассчитать и построить естественную электромеханическую характеристику и характеристику при минимальной скорости;
б) составить принципиальную силовую схему электропривода по схеме ТП – Д (схему преобразователя выбрать согласно заданному варианту), рассчитать и выбрать основные элементы схемы;
в) рассчитать и построить статические электромеханические характеристики разомкнутой системы электропривода;
г) составить функциональную схему системы автоматического управления привода, рассчитать параметры необходимых обратных связей и узел отсечки по току (ток отсечки-1,5 IH, ток стопорения-2 Н I ).
д) рассчитать и построить статические электромеханические характеристики замкнутой системы электропривода.
е) обосновать систему автоматического регулирования и рассчитать параметры регуляторов.
Содержание
| Задание……………………………………………………………………….... | 2 |
| Введение………………………………………………………………………. | 4 |
| 1 Выбор электродвигателя и расчет электромеханических характеристик…………………………………………………………………. | 5 |
| 2 Расчет и выбор элементов силовой схемы………………………………... | 8 |
| 3 Двухконтурная система электропривода с отрицательной обратной связью по скорости и отсечкой по току……………………………………... | 12 |
| 4 Определение параметров обратной связи………………………………… | 14 |
| Заключение……………………………………………………………………. | 15 |
| Список литературы……………………………………………………...……. | 16 |
Введение
Основными функциональными задачами современного автоматизированного электропривода (АЭП) являются:
- Управление процессами пуска, торможения, реверса (функции управления). Эту функцию могут выполнять разомкнутые системы АЭП. В процессе управления осуществляется грубый контроль за током. Жесткость механических характеристик хуже естественных. К настоящему моменту это самая распространенная группа АЭП.
- Стабилизация заданной величины (ток, скорость, положение, мощность и т.д.) (функция стабилизации). Эту функцию может выполнить только замкнутая система АЭП. Основная регулируемая величина – та, по которой замыкается главная обратная связь.
- Слежение за вводимыми в систему изменяющимися входными сигналами (функция слежения). Эта задача может быть выполнена только в замкнутых системах. Современная следящая система, как правило, трехконтурная.
- Выбор целесообразных режимов работы АЭП (функция адаптации). Задача может быть выполнена в замкнутых системах.
Кроме основных функций, система АЭП выполняет еще и дополнительные:
- защита электродвигателя и оборудования от коротких замыканий, перегрузок по току, напряжению и т.д.;
- блокировка, которая обеспечивает определенную последовательность операций и исключающая аварийные режимы;
- сигнализация.
1 Выбор электродвигателя и расчет электромеханических характеристик
Варианты задания выбираются по номеру зачетной книжки и начальной букве фамилии студента.
Таблица 1 – «Исходные данные»
| Р, кВт | n, об/мин | Диапазон регулирования скорости D |  ,% ,% | Схема преобразователя | Ток якоря, А | КПД,  | UН, В |
| 1,5 | 1000 | 10 | 6 | 3-х ф. мостовая | 8,7 | 0,92 | 220 |
Таблица 2 – «Коэффициенты»
| Наименование схемы | КН | Ки макс | КТ2 | КТ1 | КМ | Кu | Кα | КR | Кi |
| Трехфазная мостовая | 0,427 | 1,05 | 0,815 | 0,817 | 1,045 | 1,05 | 1 | 1,05 | 1,1 |
Выбор электродвигателя постоянного тока производится по каталогу в соответствии с заданием. Для построения естественной электромеханической характеристики двигателя постоянного тока независимого возбуждения по уравнению
2.1. Определим номинальную частоту вращения двигателя:

2.2. Минимальная заданная скорость:

2.3. Определим номинальный момент двигателя:

2.4. Определим сопротивление якоря:

2.5. Определяем параметр:

2.6. Определяем скорость идеального ХХ:

2.7. Необходимое снижение величины напряжения на статоре двигателя:

2.8. Характеристика строится по точкам номинальной нагрузки
 ,
,  и режима холостого хода с координатами
и режима холостого хода с координатами
2.9. Строим электромеханическую характеристику:
Строим естественную электромеханическую характеристику двигателя постоянного тока независимого возбуждения по уравнениям:


Рисунок 1 – «Электромеханическая характеристика»
2.10 Строим механическую характеристику по точкам:


Рисунок 2 – «Механическая характеристика»
2 Расчет и выбор элементов силовой схемы
2.1. Расчет мощности и выбор силового трансформатора и вентилей преобразователя
Подводимое к схеме выпрямления напряжение

Расчет действующее значение тока во вторичной обмотке определяется исходя из величины номинального тока двигателя
 по формуле
по формуле
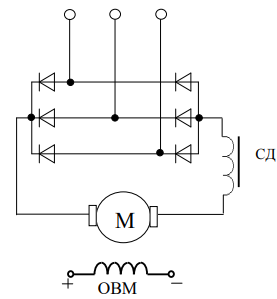
Рисунок 3 – «Трехфазная мостовая схема»
Расчет типовой мощности трансформатора производится с учетом нагрева первичной и вторичной обмоток трансформатора при помощи коэффициента КМ. Таким образом, типовая мощность трансформатора для преобразователя, питающего якорь двигателя, может быть рассчитана по формуле

Трансформатор выбирается по типовой мощности и необходимому вторичному напряжению и проверяется по нагреву первичным током
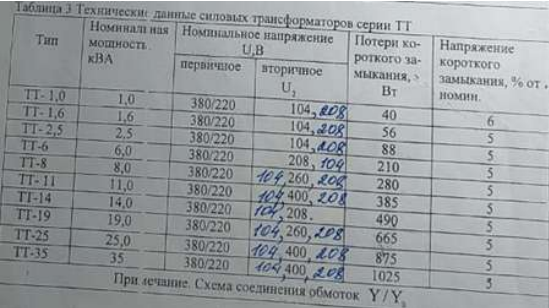

Выбираем трансформатор ТТ-2,5




2.2. Расчет индуктивности сглаживающих реакторов (дросселей)
Индуктивность якорной цепи двигателя по эмпирической формуле

Индуктивность трансформатора определяется, как

Необходимая индуктивность цепи


Где
 рад/с - угловая частота пульсаций;
рад/с - угловая частота пульсаций; - относительная величина ЭДС пульсаций для мостовой схемы.
- относительная величина ЭДС пульсаций для мостовой схемы.2.3. Определение параметров привода и построение электромеханических характеристик
Значение коммутационного сопротивления:

Эквивалентное внутреннее сопротивление преобразователя

Для мостовых схем
 вдвое больше (сопротивление двух фазных обмоток). Величина п указывает число последовательно соединенных тиристоров (для мостовых схем удвоенное).
вдвое больше (сопротивление двух фазных обмоток). Величина п указывает число последовательно соединенных тиристоров (для мостовых схем удвоенное).Электромагнитная постоянная времени:
Где

Далее производится расчет статических электромеханических характеристик привода в разомкнутой системе. ЭДС преобразователя при номинальной скорости и номинальной нагрузке

Где
 падение напряжения в переходах тиристоров
падение напряжения в переходах тиристоров и щеточных контактах двигателя
Статическая характеристика строится при изменении тока по формуле:

ЭДС преобразователя при минимальной скорости и номинальной нагрузке

Нижняя статическая характеристика строится по формуле

Рисунок 4 – «Нижняя статическая характеристика»
3 Двухконтурная система электропривода с отрицательной обратной связью по скорости и отсечкой по току
Как видно из предыдущих расчетов, жесткость механических характеристик электропривода с вентильным преобразователем относительно мал. В связи с этим с целью расширения диапазона регулирования скорости в системах вентильного электропривода постоянного