Файл: Расчет и выбор элементов сау автоматизированного электропривода по схеме тиристорный преобразователь двигатель.docx
Добавлен: 05.12.2023
Просмотров: 89
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
тока могут использоваться обратные связи, а именно положительная по току якоря, либо отрицательные по скорости и по напряжению. С целью огра¬ничения тока в вентильном преобразователе и якоре дви¬гателя может использоваться задержанная отрицательная обратная связь по току (токовая отсечка). В этом случае электропривод имеет экскаваторную характеристику.
Система АЭП с отрицательной обратной связью по скорости и отсечкой (задержанной обратной связью) по току представлена на рисунке 5.
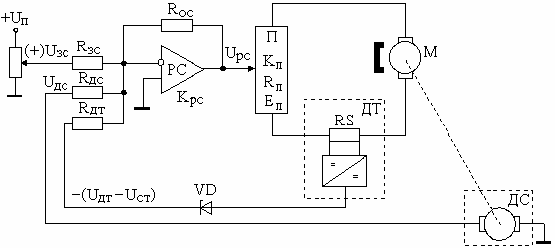
Рисунок 5 – «Система АЭП с отрицательной обратной связью по скорости и отсечкой по току»
В зависимости от величины тока якоря, возможны два режима работы привода:
а) I < Iотс, Uдт< Uст VD.
В рабочем диапазоне тока работает только одна отрицательная обратная связь по скорости (сигнал ОС по току не поступает на усилитель). Тогда напряжение управления (при Rзс = Rдс) равно
Uy = (Uзс – Uдс)крс (22)
ЭДС преобразователя уравновешивается ЭДС двигателя и падением напряжения на эквивалентном сопротивлении
Еп = Uу кп = Е + IRЭ (23)
где Е = kФнω - ЭДС якоря ДПТ;
КП – коэффициент усиления преобразователя.
Напряжение датчика скорости пропорционально частоте вращения якоря двигателя:
Uдс = кдс ω (24)
Совместное решение уравнений (22), (23) и (24) дает выражение (25) для первого участка электромеханической характеристики привода с отрицательной обратной связью по скорости:
(Uзс – кдс ω)крскп = kФн ω + IRЭ ;
Uзскрскп + кдс ω крскп = kФн ω + IRЭ ;
 (25)
(25)
где Кд = 1/kФН – коэффициент передачи двигателя.
б) I > Iотс, Uдт> Uст VD
.
В этом диапазоне тока одновременно на входе регулятора скорости действуют два сигнала ОС:
- сигнал по скорости, который стремится сделать скоростную характеристику более жесткой;
- сигнал по току, который стремится сделать скоростную характеристику более мягкой.
Для получения требуемой характеристики должна преобладать ОС по току. Сигнал управления становится равен
Uy = (Uзс – Uдс – Uдт + Uст)крс (26)
где UДТ = IRЭ сигнал датчика тока;
UСТ – напряжение пробоя стабилитрона.
Решая совместно уравнения (23), (24) и (26), получим выражение (27) для второго участка электромеханической характеристики привода при наличии обратных связей по скорости и по току:
[Uзс – ωкдс – I(Ra + Rп) + Uст]крскп = сеФн ω + I(Ra + Rп);
 . (27)
. (27)
4 Определение параметров обратной связи
Перепад скорости в разомкнутой системе при номинальной нагрузке
 Р
Р  10,917 с-1
10,917 с-1
где
Заданный перепад скорости в замкнутой системе
З  0,668 с-1
0,668 с-1
где
 0,06 % - статистическая ошибка в относительных единицах.
0,06 % - статистическая ошибка в относительных единицах.
Перепад скорости в замкнутой системе равен

где Кд
= 1/ = 1/2,017 = 0,496 – коэффициент передачи двигателя
= 1/2,017 = 0,496 – коэффициент передачи двигателя
Тогда необходимый коэффициент отрицательной обратной связи по скорости
 необх =
необх =  = 1,326
= 1,326
где Кп = =
=  = 23,319
= 23,319
Значение коэффициента усиления Кп берется из регулировочных характеристик преобразователя при Еnmin. По необходимому коэффициенту обратной связи выбирается тахогенератор с фактическим значением
Кдс = =
=  = 0,095
= 0,095
и рассчитывается коэффициент усиления регулятора скорости
Крс = =
=  = 13,96
= 13,96
Заключение
Когда мы строили механические характеристики они не достаточно жесткие для того чтобы обеспечить высокую точность, широкий диапазон регулирования. Анализ показывает, что жесткость механических характеристик электропривода с вентильным преобразователем относительно мала. В связи с этим, с целью расширения диапазона регулирования скорости в системах вентильного электропривода постоянного тока, могут использоваться обратные связи, а именно положительная по току якоря, либо отрицательные по скорости и по напряжению. РС – регулятор скорости с коэффициентом усиления КРС, ДС - датчик скорости с передаточным коэффициентом КДС. На сумматоре алгебраически складываются напряжения задания по скорости UЗС и напряжения от датчика скорости UДС.
Список литературы
1. Москаленко, В.В. Системы автоматизированного управления электропривода [Текст]: учебник / В.В. Москаленко.- М.: ИНФРА-М, 2011.- 208с.
2. Лезнов Б.С. Частотно-регулируемый электропривод насосных установок. М.:»Машиностроение», 2013.-176с.
3. Мустафин М.А., Алмуратова Н.К. Электропривод. Методические указания к выполнению курсовой работы.- Алматы: АУЭС, 2017.-34с.
4. П.И.Сагитов, Р.М.Шидерова, Н.К.Алмуратова Электропривод. Методические указания к выполнению лабораторных работ для студентов специальности «Электроэнергетика».-Алматы: - АУЭС, 2014-34с.
Система АЭП с отрицательной обратной связью по скорости и отсечкой (задержанной обратной связью) по току представлена на рисунке 5.
Рисунок 5 – «Система АЭП с отрицательной обратной связью по скорости и отсечкой по току»
В зависимости от величины тока якоря, возможны два режима работы привода:
а) I < Iотс, Uдт< Uст VD.
В рабочем диапазоне тока работает только одна отрицательная обратная связь по скорости (сигнал ОС по току не поступает на усилитель). Тогда напряжение управления (при Rзс = Rдс) равно
Uy = (Uзс – Uдс)крс (22)
ЭДС преобразователя уравновешивается ЭДС двигателя и падением напряжения на эквивалентном сопротивлении
Еп = Uу кп = Е + IRЭ (23)
где Е = kФнω - ЭДС якоря ДПТ;
КП – коэффициент усиления преобразователя.
Напряжение датчика скорости пропорционально частоте вращения якоря двигателя:
Uдс = кдс ω (24)
Совместное решение уравнений (22), (23) и (24) дает выражение (25) для первого участка электромеханической характеристики привода с отрицательной обратной связью по скорости:
(Uзс – кдс ω)крскп = kФн ω + IRЭ ;
Uзскрскп + кдс ω крскп = kФн ω + IRЭ ;
(25)где Кд = 1/kФН – коэффициент передачи двигателя.
б) I > Iотс, Uдт> Uст VD
.
В этом диапазоне тока одновременно на входе регулятора скорости действуют два сигнала ОС:
- сигнал по скорости, который стремится сделать скоростную характеристику более жесткой;
- сигнал по току, который стремится сделать скоростную характеристику более мягкой.
Для получения требуемой характеристики должна преобладать ОС по току. Сигнал управления становится равен
Uy = (Uзс – Uдс – Uдт + Uст)крс (26)
где UДТ = IRЭ сигнал датчика тока;
UСТ – напряжение пробоя стабилитрона.
Решая совместно уравнения (23), (24) и (26), получим выражение (27) для второго участка электромеханической характеристики привода при наличии обратных связей по скорости и по току:
[Uзс – ωкдс – I(Ra + Rп) + Uст]крскп = сеФн ω + I(Ra + Rп);
. (27)4 Определение параметров обратной связи
Перепад скорости в разомкнутой системе при номинальной нагрузке
Р 10,917 с-1где
Заданный перепад скорости в замкнутой системе
З 0,668 с-1где
0,06 % - статистическая ошибка в относительных единицах.Перепад скорости в замкнутой системе равен
где Кд
= 1/
= 1/2,017 = 0,496 – коэффициент передачи двигателяТогда необходимый коэффициент отрицательной обратной связи по скорости
необх = = 1,326где Кп =
= = 23,319Значение коэффициента усиления Кп берется из регулировочных характеристик преобразователя при Еnmin. По необходимому коэффициенту обратной связи выбирается тахогенератор с фактическим значением
Кдс =
= = 0,095и рассчитывается коэффициент усиления регулятора скорости
Крс =
= = 13,96Заключение
Когда мы строили механические характеристики они не достаточно жесткие для того чтобы обеспечить высокую точность, широкий диапазон регулирования. Анализ показывает, что жесткость механических характеристик электропривода с вентильным преобразователем относительно мала. В связи с этим, с целью расширения диапазона регулирования скорости в системах вентильного электропривода постоянного тока, могут использоваться обратные связи, а именно положительная по току якоря, либо отрицательные по скорости и по напряжению. РС – регулятор скорости с коэффициентом усиления КРС, ДС - датчик скорости с передаточным коэффициентом КДС. На сумматоре алгебраически складываются напряжения задания по скорости UЗС и напряжения от датчика скорости UДС.
Список литературы
1. Москаленко, В.В. Системы автоматизированного управления электропривода [Текст]: учебник / В.В. Москаленко.- М.: ИНФРА-М, 2011.- 208с.
2. Лезнов Б.С. Частотно-регулируемый электропривод насосных установок. М.:»Машиностроение», 2013.-176с.
3. Мустафин М.А., Алмуратова Н.К. Электропривод. Методические указания к выполнению курсовой работы.- Алматы: АУЭС, 2017.-34с.
4. П.И.Сагитов, Р.М.Шидерова, Н.К.Алмуратова Электропривод. Методические указания к выполнению лабораторных работ для студентов специальности «Электроэнергетика».-Алматы: - АУЭС, 2014-34с.