Файл: Контрольная работа автоматизация технологических процессов теоретическая часть.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 44
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
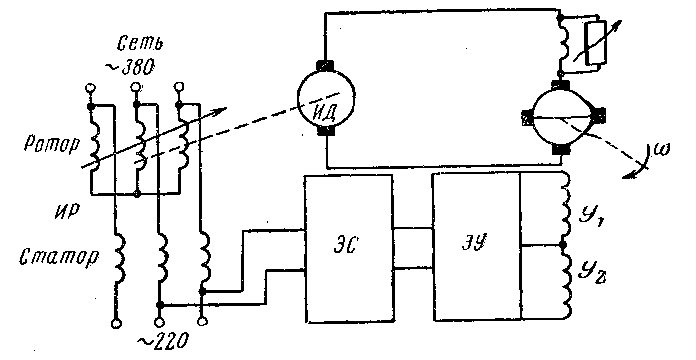
Рис. 2. Схема автоматического регулирования
синусоидального напряжения
Такие электроприводы применяются в различных областях, в связи с этим растет производство ЭМУ поперечного поля. Электроприводы с использованием ЭМУ мощностью до 10кВт получили в настоящее время преимущественное распространение по сравнению с другими типами приводов в станках и установках радиоэлектронной промышленности. Рассмотрим несколько примеров использования электромашинных усилителей в схемах автоматики.
На рис. 2 приведена схема бесконтактной системы автоматического регулирования амплитуды си ну со ид а ль но го напряжения. Эта схема применяется на радиозаводах на участках настройки телевизоров и радиоприемников, где напряжение должно быть стабилизировано по амплитуде и синусоидально изменяться по времени. Применение феррорезонансных стабилизаторов для этих целей недопустимо, так как, поддерживая с достаточной точностью амплитуду, феррорезонансные стабилизаторы сильно искажают синусоиду. Поэтому в таких случаях применяют системы автоматической стабилизации напряжения с использованием в качестве регулирующего органа индукционный регулятор.
В схеме рис. 2 нестабильное трехфазное напряжение подается на ротор индукционного регулятора ИР. Выходное стабилизируемое напряжение снимается с зажимов статора, подается на приемники и одновременно на вход элемента сравнения, где сравнивается с опорным эталонным напряжением. Сигнал рассогласования усиливается электронным усилителем ЭУ и поступает на одну из обмоток управления электромашинного усилителя — У1 или У2. В зависимости от полярности сигнала рассогласования на выходе ЭМУ появляются напряжения прямой или обратной полярности и исполнительный двигатель ИД, вращаясь, перемещает ротор индукционного регулятора в сторону уменьшения или увеличения напряжения.
На рис. 3 представлена электрическая схема полуавтомата для спая стеклянного дна с металлическим конусом электроннолучевых трубок. Вид спая в этом случае несогласованный, так как коэффициент линейного расширения материала конуса (хромистая сталь) и стекла не одинаковый. Поэтому для получения хорошего спая необходимо сначала произвести разогрев стекла. Эту операцию выполняет блок нагревателей БH, температура которого контролируется термопарой T и автоматически поддерживается терморегул ирующим прибором ЭМР. Сваривание при рабочей температуре 1100—12000C производится токами высокой частоты, которые вырабатывает генератор повышенной частоты Г, питающий блок индукторов БИ. Для получения стабильного выходного напряжения генератора Г его цепь возбуждения питается от ЭМУ поперечного поля. В этой схеме ЭМУ играет роль усилителя мощности и элемента сравнения.
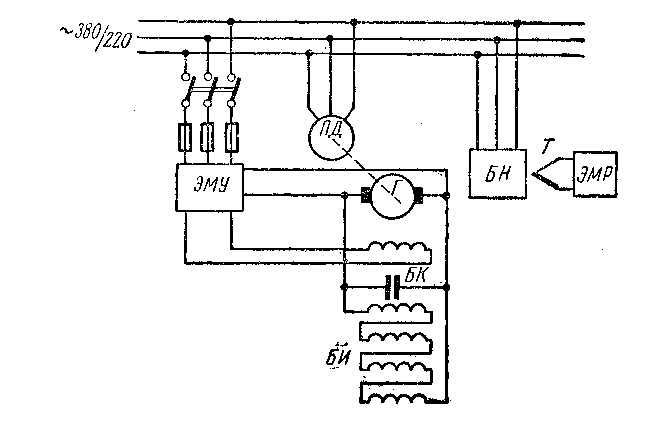
Рис. 3. Электрическая схема полуавтомата для спая стеклянного дна с металлическим конусом
На рис. 2 и 3 приведены схемы использования электромашинных усилителей в системах радиоэлектронной промышленности. Аналогичных схем в различных автоматизированных системах, где в качестве усилителей мощности используются ЭМУ поперечного поля, довольно много. Использованию ЭМУ в этих схемах способствует наличие нескольких обмоток управления, что позволяет сравнивать сигналы и вводить обратные связи. Высокий коэффициент усиления повышает быстродействие таких систем.
ПРАКТИЧЕСКАЯ ЧАСТЬ
Контрольная работа посвящена решению задачи анализа системы автоматического регулирования расхода. Функциональная схема САР расхода представлена на рис.1.
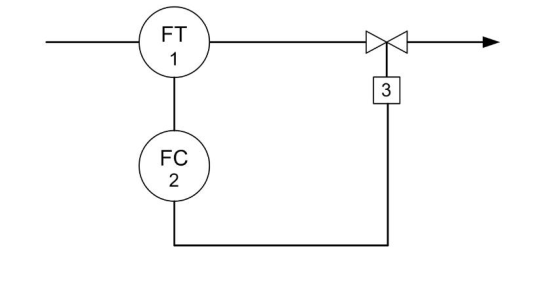
Рис.1 Функциональная схема САР расхода
На рис.1 через FT (поз. 1) обозначен измерительный преобразователь расхода, через FC (поз. 2) - регулятор расхода. Позиции 3 соответствует исполнительное устройство.
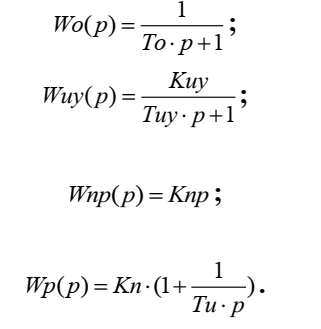
Объект управления представляет собой участок трубопровода от измерительного преобразователя до исполнительного устройства. Передаточные функции объекта управления, исполнительного устройства, измерительного преобразователя и регулятора имеют вид
Ход решения:
| Последняя цифра студенческого билета (зачетки) | То | Кпр | Киу | Тиу | Кп | Ти |
| 4 | 6 | 0.6 | 0.9 | 3 | 0.9 | 1.1 |
Задание 1
1. Получить передаточную функцию разомкнутой системы.
Исходная структурная схема:

Рис.2 - Структурная схема САР расхода
Подставляем значения коэффициентов из таблицы 1:
ПФ разомкнутой системы находится как произведение всех звеньев, последовательно включённых в состав системы:

Задание 2
2. Получить передаточную функцию замкнутой системы.
ПФ замкнутой системы:
Задание 3
3. Определить устойчивость САР по алгебраическому критерию Гурвица.
Из найденной ПФ замкнутой системы
 выделяем характеристический полином системы – знаменатель ПФ:
выделяем характеристический полином системы – знаменатель ПФ: 
По необходимому условию Гурвица, все коэффициенты характеристического полинома должны быть положительными. Необходимое условие выполняется.
Достаточное условие: Для того, чтобы система была устойчивой, достаточно, чтобы определители всех порядков матрицы Гурвица были положительными. Формируем матрицу Гурвица:


Рассчитываем определители матрицы Гурвица:
Определители 2 и 3 порядка положительные, следовательно, замкнутая система устойчива.
Задание 4
4. Определить устойчивость САР по частотному критерию Михайлова.
Система устойчива, если годограф Михайлова начинается на положительной полуоси и, раскручиваясь против часовой стрелки, последовательно проходит n четвертей [n – порядок характеристического полинома]
Характеристический полином системы:
Произведём в характеристическом полиноме замену s→jω:

Выделяем действительную и мнимую составляющую:

При ω = 0 получим первую точку годографа Михайлова. Заносим значение в таблицу и отмечаем координаты точки при ω = 0 на комплексной плоскости:
Занесём эту частоту и значения действительной и мнимой составляющих в таблицу 2.
Определяем вторую точку пересечения годографа с осями координат. Значение частоты, при которой характеристика пересекает мнимую ось, определяем, приравнивая вещественную часть к нулю:

Находим значение мнимой части при этой частоте:

Занесём эту частоту и значения действительной и мнимой составляющих в таблицу 2.
Находим третью точку пересечения кривой Михайлова с осями координат. Значение ω, при котором годограф пересекает вещественную ось между третьим и вторым квадрантами, находим, приравнивая мнимую часть к нулю:

Находим значение вещественной части при этой частоте:

Занесём эту частоту и значения действительной и мнимой составляющих в таблицу 2.
Найдём значения X(ω) и Y(ω) на некоторых других частотах:
Таблица 2:
Строим годограф Михайлова:
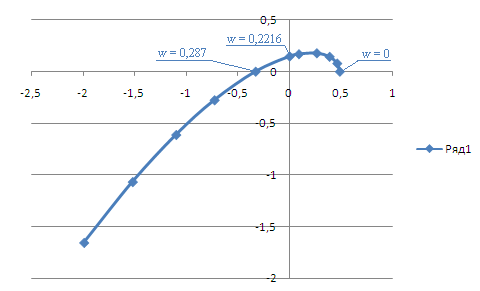
Годограф Михайлова начинается на положительной полуоси, и последовательно проходит n = 3 четверти, следовательно, замкнутая система устойчива.
Исследуем устойчивость САР по критерию Гурвица.
Характеристическое уравнение (полином) замкнутой системы имеет вид:

Составляем главный определитель Гурвица
Определяем диагональные миноры этого определителя



или

Все диагональные миноры главного определителя Гурвица оказались положительными, следовательно, все корни характеристического уравнения будут иметь отрицательные вещественные части, а САР будет устойчива.
. СПИСОК ЛИТЕРАТУРЫ
1. Схиртладзе, А.Г. Автоматизация технологических процессов и
производств. [Электронный ресурс] / А.Г. Схиртладзе, А.В. Федотов, В.Б.
Моисеев, В.Г. Хомченко. — Электрон. дан. — Пенза : ПензГТУ, 2015. —
442 с. — Режим доступа: http://e.lanbook.com/book/63096 — Загл. с экрана.
2. Селезнева, С.В. Введение в специальность "Автоматизация
технологических процессов и производств". [Электронный ресурс] / С.В.
Селезнева, И.А. Прошин. — Электрон. дан. — Пенза : ПензГТУ, 2012. — 64
с. — Режим доступа: http://e.lanbook.com/book/62530 — Загл. с экрана.
3. Прошин, И.А. Автоматизация технологических процессов и
производств Подготовка и выполнение курсового проектирования. Учебнометодическое пособие для студентов, обучающихся по специальности
220301 "Автоматизация технологических процессов и производств".
[Электронный ресурс] / И.А. Прошин, Н.Н. Руденко. — Электрон. дан. —
Пенза : ПензГТУ, 2013. — 250 с. — Режим доступа:
http://e.lanbook.com/book/62506 — Загл. с экрана.
4. Проектирование систем автоматизации технологических проц
ессов / А. С. Клюев [и др], - М. : Альянс, 2008. - 464 с.
5. Шандров Б.В. Автоматизация производства: учебник / Б.В.
Шандров, А.А. Шапарин, А.Д. Чудаков. – 4-е изд., стер. – Москва: ИЦ
«Академия», 2008. – 336с.
6. Гольдберг О.Д. Инженерное проектирование и САПР
электрических машин: учебник / О.Д. Гольдберг, И.С. Свириденко. –
Москва: ИЦ «Академия», 2008. – 560с.
7. Андреев Е.Б. Технические средства систем управления
технологическими процессами нефтяной и газовой промышленности. - М.
Просвещение, 2005.
8. Веревкин А. П., Кирюшин О. В. Автоматизация технологических
процессов и производств в нефтепереработке и нефтехимии. - М.: Высшая
школа, 2005.