ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 128
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
- Агрегаттардың іске қосылуы мен кідірісін басқару.
Жүйелік (қызметтік) функциялар.
- Бағдарламаны диспетчеризациялай (орындалудың жүйелілігі мен реті).
- Ішкі жүйелік компоненттер (ЖЕСҚ, дербес магнитті дисктегі жинақтауыштар) мен сыртқы құрылғылар (пернетақта, принтерлер, т.б.). арсындағы айырбайстау ұйымы.
- Жүйелік компоненттерді сынақтау.
- Келеңсіздіктер мен тоқтап қалудан қорғаныс.
- Апаттық және апат алды жағдайларындағы (операциялық жүйе тоқтап қалған кезде автоматты түрде қайта іске қосу немесе келеңсіздіктер мен тоқтау кезінде жүйенің жұмыс істеу қабілеттілігін қалпына келтіру) жүйенің жұмысына бағытталған процедуралар.
1.7 ТП АБЖ жұмыс режимдері
Қазіргі таңда өндірістегі технологияның қиындығымен қатар агрегаттардың бірыңғай өнімділігінің бұлжытпай артуы байқалады. Технологиялық қондырғылардың қуатын арттырумен бірге бақылай және басқару жүйелерінің ақпараттық қуаты да артады. Сондықтан басқару пультіндегі оператор жүздеген технологиялық параметрлердің өзгерісін бірден бақылай алмайды. Мұндай жағдай ЭЕМ-ді қолдану негізіндегі АБЖ қолдануды талап етті.
ЭЕМ-нің ТП АБЖ-гі негізгі жұмыс режимдерін қарастырайық:
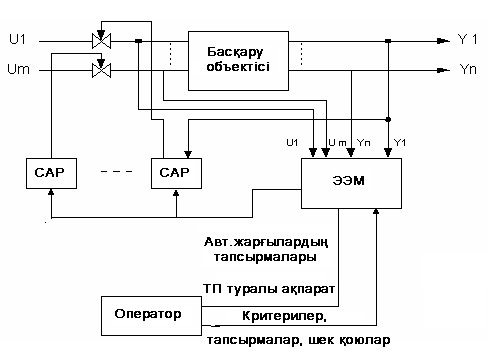
Ақпараттық режим.
ЭЕМ-ге басқару объектісінің жағдайы туралы ақпарат, соның ішінде бақыланылатын және басқарылатын шамалардың мәндері енгізіледі. ЭЕМ көмегімен алынған объекті жайындағы деректер дисплейге шығарылады; ТБО жұмыс сапасының көрсеткіштерін есептеуде қолданады; одан ары өңдеу үшін жоғары орналасқан АБЖ-не беріледі. Оператор машина шығаратын ақпаратты қолданып, басқару пультінен технологиялық процесті басқарып отырады.
Бұл режим технологиялық процесті ЭЕМ арқылы тікелей басқаруды жүзеге асыру конструктивті күрделі және экономикалық тиімсіз болған жағдайда, сонымен бірге технологиялық процесте қиын байқалатын өзгешеліктер болған жағдайда қолданылады.

1.4 сурет - Ақпараттық режимдегі ТП АБЖ-нің құрылымы
Супервизорлы басқару режимі.
Супервизор – ЭЕМ-нің негізгі бағдарламасының атауы. ТП АБЖ супревизорлы режим жұмысының негізгі артықшылығы – жергілікті реттегіштерді (жергілікті, жеке) ЭЕМ көмегімен автоматты басқару. Мұндай жүйелерде басқару контуры ЭЕМ арқылы тұйықталған және оператордың функциясы жалпы процесс жүрісін бақылау болып қалады. Адамның қатысу сирек, күтпеген (апаттық) жағдайлар пайда болғанда талап етіледі.
Оператордың өзгеру кезіндегі процесс басқарылуына түзетулер енгізуіне мүмкіндігі бар, мысалы, өндіріліп жатқан өнімнің құрамына немесе шикізатына.
Сызба бойынша тұйықталған жүйе жергілікті реттегіштер көмегімен, егер ЭЕМ жұмысын тоқтатса да жұмыс істейтіні көрініп тұр. Реттегіште жарғылардың мәндері айқындалады және ол ЭЕМ-де есептелген соңғы мәнге тең болады. Кейін оператор жарғыларды қолмен басқару арқылы өзгерте алады.
Берілген сызба үлкен залал немесе ірі экономикалық зиян келтіретін апаттарға әкеліп соғатын маңызды технологиялық агрегаттарды басқару кезінде қолданылады.
Жергілікті реттегіштер мен ЭЕМ-ді бір басқару жүйесінде қолдану, оның бағасын арттырады және күрделірек етеді.
Негізгі артықшылығы: жоғары сенімділік.
1.5 сурет - Супервизорлы басқару режиміндегі ТП АБЖ-нің құрылымы
Тікелей басқару режимі.
Мұндай ТП АБЖ –де АМ іске қосу үшін қолданылған сигналдар ЭЕМ-нен тікелей келеді және басқару жүйесінде жергілікті реттегіштер болмайды. ЭЕМ бұл режимде таңдалған бақылану заңын бағдарламалық жүзеге асырады, басқарушы әсерлерді есептейді және олардың БО АМ берілуін қамтамасыз етеді. Оператордың функциясы жүйенің жұмысын бақылап отыру болып табылады.
Артықшылығы: жоғары жылдам әрекет, басқарудың күрделі заңдарын жүзеге асыру. Кемшілігі: сенімділігі аз.
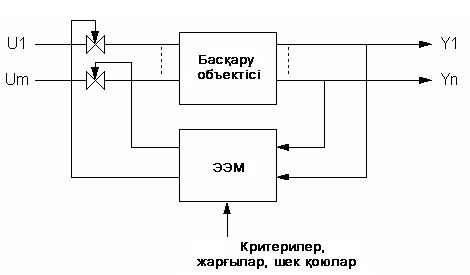
1.6 сурет - Тікелей басқару режиміндегі ТП АБЖ-нің құрылымы
АБЖ-де ЭЕМ күрделі технологиялық процестермен бір уақытта бірнеше режимде жұмыс істей алады. Бір параметрлерге тек ақпараттық функциялар, басқаларға – супервизорлы режим, ал үшіншілерде тікелей басқару орындалады.
1.8 ТП АБЖ есептерін алгоритмдеу
ТП АБЖ-ны алгоритммен қамтамасыз етуін үш топқа бөлуге болады:
а) Ақпаратты жинау және бастапқы өңдеу алгоритмдері.
б) Арнайы математикалық қамтамасыз ету алгоритдері (интегралдау, салыстыру, шығынның өзгерісі кезінде түбірден шығару, т.б.).
в) Ақпаратты шығару алгоритмдері.
г) Жалпы жүйелік қамтамасыз ету алгоритмдері (операциялық жүйе жұмысының алгоритмдері).
1.8.1 Ақпаратты жинау алгоритмдері жинау реттілігін және сәйкес жады бөлімдеріне ақпараттың жазылуын анықтайды. Сұрақтың мезгілдігі технологиялық параметрдің өзгеру сипатына тәуелді, ал артықшылық – технологиялық мәнділікке тәуелді. Сұрақтың реті қатаң болуы мүмкін, яғни қатал реттілікпен өндіріледі; немесе дағдыландырғыш, мысалы, егер кездейсоқ параметрдің мәні апаттық мәнге жақын болса, онда олар сұралады және жадыға ең алдымен енгізіледі.
- Аналогты сигналдарды таңбалау (ауқымдау)
Датчиктің шығыс сигналы мен технологиялық параметрдің айқын мәні арасындағы функйионалдық байланысты алу таңбалау мақсаты болып табылады. xmax, xmin ,xи – датчиктің шығыс сигналының x(t) ең үлкен , ең кіші және өлшенетін мәндері болсын, ал ymax, ymin – айқын бірлікті датчиктің өлшеу аралығының xmax пен xmin-ға сәйкес келтірілген y(t) ең үлкен және ең кіші мәндері. Онда КТ =
y(t) = KT(xи - xmin) + y0,
мұнда y0 – жылжу, яғни технологиялық параметрдің бастапқы мәні.
Бағдарламалық блок түріндегі таңбалану функциясы ЭЕМ жадысына салынады және ақпаратты өңдеудің жалпы алгоритмінің бір бөлігі болып табылады. Таңбалану функиясының көмегімен ЭЕМ-де есептелген технологиялық параметрдің айқын бірлікті мәні негізгі бағдарламаның одан арғы жұмысы кезінде қолданылады.
Мысал:
Термокамерадағы температура, 300-ден 1000 ºC дейінгі аралықта өлшенетін және бірыңғай шығыс сигналы 4-тен 20 мА түрінде болған термоэлектрлік түрлендіргіш көмегімен өлшенеді.
I = 10 мА нүктесінде Т = 562,5 ºC.
- Нақтылықты бақылау
Бастапқы мәліметтердегі қателерді табу мақсатына қолданылады. Тексеру xmin ≤ x(t) ≤ xmax нақтылдық диапазонында жүргізіледі немесе параметрдің жылдамдығының өзгерісі Δxmin ≤ [xi(t)- xi-1(t)] ≤ Δxmax болуы қажет. Нақтылықты есептеу мақсатында алдыңғы мәндер қабылдана алады (орташа, шекаралық және т.б.). Егер нақтылы емес мәндер анықталса, онда басқарушы жүйе апаттық жағдай туралы немесе/және технологиялық процессті тоқтатады.
- Фильтрлеу (Сүзгі)
Технологиялық процесстің параметрлеріндегі кездейсоқ бөгеттерді, шуды және бөгде сигналдарды азайтуға қолданылады.
Өлшеу нәтижесі Y(k) әдетте пайдалы сигнал X(k) және аддитивті бөгет Z(k) түрінде сипатталады, ол дегеніміз
Y(k) = X(k) + Z(k).
АЖБ ТП бөгет көзі болып электромагнитті наводка, вибрация, ағыннын турбуленттілігі, датчиктердің өзіндік қателігі және т.б. бола алады.
Қарапайым сүзгілерге келесілерді жатқызуға болады:
- Өлшемдер жиынтығының өңдеу алгоритмі
ХФ(i) =
Шындығында ол кірістегі сигналдың арифметикалық ортасын есептейді. Х тұрақты болған жағдайда алгоритмді қолдануға болады.
- Рекуррентті алгоритм
ХФ(i) = ХФ(i-1) +
- «Тайғақ» (ағымдағы) орташа сүзгісі
ХФ(i) =
Сигналдың соңғы өлшеулері К орташаланады.
- Экспоненциалды сүзгі
Аппараттық үйлесім болып RC-тізбегі табылады.
Қарастырылған сүзгілердің жұмыс алгоритмі АБЖ негізгі басқарушы бағдарламасының құрамындағы бағдарламалық блок (бағыныңқы бағдарлама) түрінде жүзеге асады
1.8.2 Ақпартты шығару алгоритмдері
Ақпартты көрсету, басып шығару құрылғыларына шығару кезіндегі операция реттілігін, тым төменгі немесе тым жоғарғы деңгейдегі ТП АБЖ-мен ақпарат алмасуын, атқарушы механизмге әсер ететін басқарушы әсерлердің шығару реттілігін анықтайды.
Ақпаратты өңдеу алгоритмдерінің реттілігін 7-суретте берілгендей сызба түрінде көрсетуге болады.
Ақпаратты жинау алгоритмдері
(канал сұрақтарының реттілігі )

Кіріс сигналдарын таңбалау (ауқымдау)
Кіріс сигналдарының нақтылығын бақылау

Кіріс сигналдарының фильтрленуі
Арнайы математикалық қамтамасыз ету алгоритмдері
Ақпаратты шығару алгоритмдері
1.7 сурет - ТП АБЖ-гі ақпаратты өңдеу алгоритмдерінің реттілігі
1.9 ТП АБЖ-ң ТҚК-нің ( техникалық құралдар кешенінің) құрылымды – функционалдық сызбасы
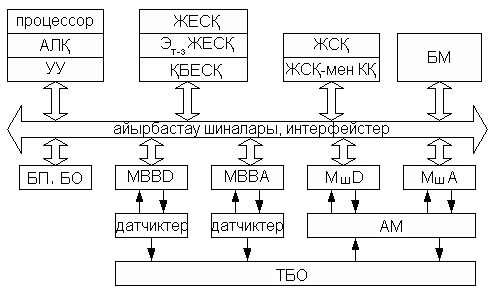
1.8 сурет -ТП АБЖ-ң ТҚК-нің құрылымды – функционалдық сызбасы
АЛҚ – арифметикалық-логикалық құрылғы
Эт-зЖЕСҚ –ажырату, қуат көзінің жоғалу жағдайында анағұрлым маңызды технологиялық және жүйелік параметрлер мен деректерді сақтауға арналған, энергияға тәуелсіз ЖЕСҚ
ҚБЕСҚ -уақытша-тұрақты параметрлерді сақтауға арналған қайта бағдарланатын (тұрақты-айнымалы) есте сақтау құрылғысы.
ЖСҚ – жүйелік сыртқы құрылғы (тіркейтін, кескіндейтін, басып шығаратын )
ЖСҚ-мен КҚ – ЖСҚ-мен кездесетін құрылғы
БМ – байланыстың машинааралық, жүйеаралық модулдері
БП – басқару пульті
БО – басқару органдары
ТП АБЖ-ң ТҚК-нің элементтер құрылымын толығырақ қарастырайық
Дискретті сигналдарды енгізу модулдері
ЭЕМ


Датчик
НТ


БҚ
НТ

Датчик

САНАУЫШ
Датчик


НТ


1.9 сурет - Дискретті сигналдарды енгізу модулдері
Кросс (клеммник, монтаждау ақысы және т.б.) датчиктің шығыстары келесі құрылғылармен келісуі үшін арналады.
НТ (нормалаушы түрлендіргіш) сигналды күшейту (азайту), фильтрлеу, бір түрден басқа түрге (мысалы, пневматикалықты электрлікке және т.б.) түрлендіру үшін арналады.
Санауыш белгіленген уақыт ішінде датчиктен бірнеше рет сұрау үшін қолданылады.
Дискретті сигналдардың шығару модулдері