ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.12.2023
Просмотров: 12
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Уральский федеральный университет
имени первого Президента России Б.Н. Ельцина
Институт радиоэлектроники и информационных технологий – РТФ
ИТОГОВАЯ РАБОТА С МАЯТНИКОМ
Выполнили
студенты группы РИ-212701 Бондаренко Д.И.
Подпись
Лихачев Д.А.
Подпись
«__» __________ 2022 г.
Проверил
преподаватель. А.А. Юрлова
| Оценка | | Дата | | Подпись преподавателя |
Екатеринбург
2022
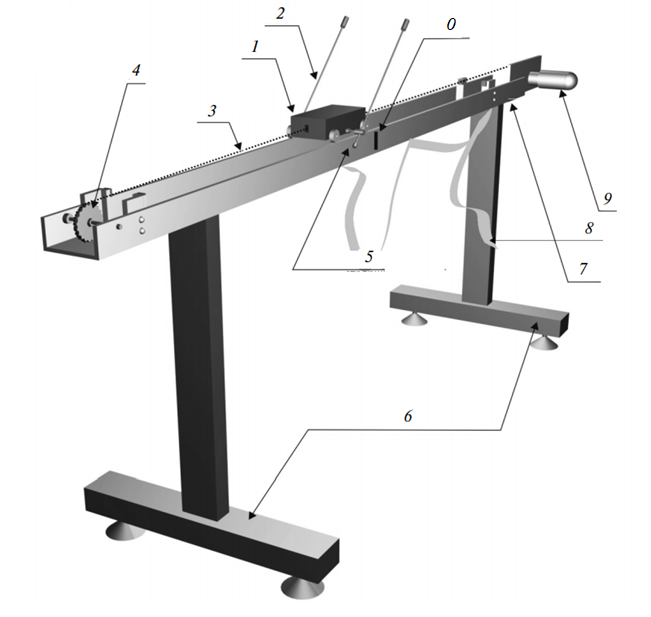
Описание стенда маятника
-
0 — центральная метка -
1 — тележка -
2 — стержень с маятником -
3 — ремень -
4 — зубчатое колесо -
5 — винт для фиксации стержня -
6 — регулируемые стойки -
7 — регулировка натяжения ремня -
8 — ленточный кабель -
9 — двигатель постоянного тока
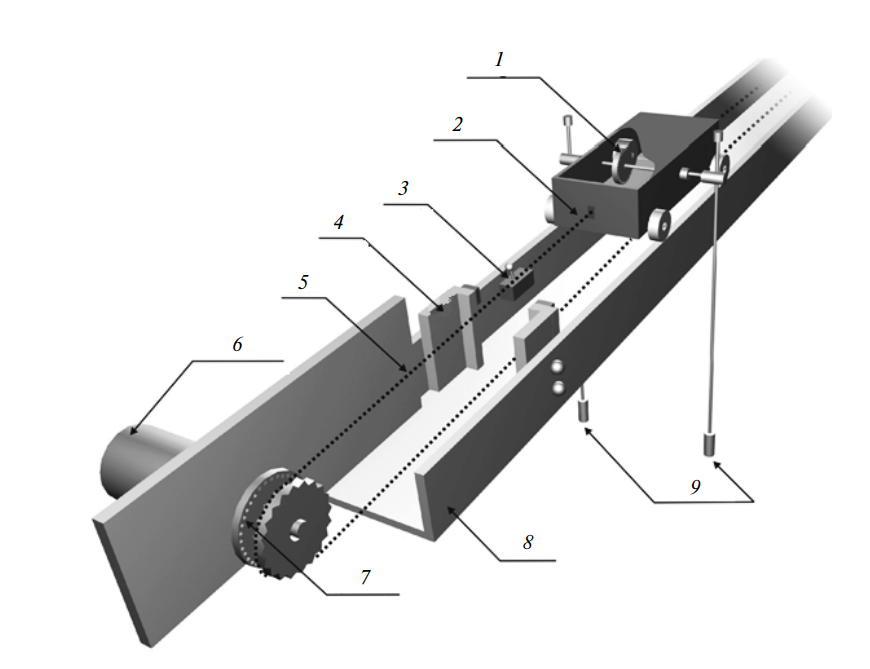
Объект управления
-
1 — Инкрементальный датчик углового положения маятника -
2 — Тележка -
3 — Концевой выключатель -
4 — Буферный ограничитель -
5 — Ремень -
6 — Двигатель постоянного тока -
7 — Инкрементальный датчик положения тележки -
8 — Рельс -
9 — Сдвоенный маятник
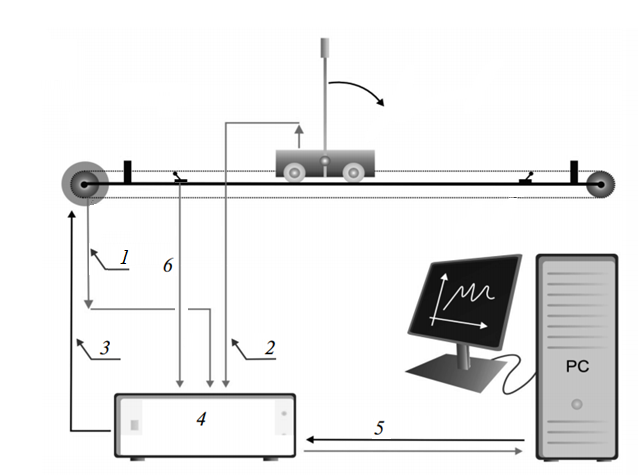
Функциональная схема системы управления
-
1 — измеренное значение перемещении тележки -
2 — измеренное значение отклонения угла маятника -
3 — управляющий сигнал -
4 — блок управления двигателем и интерфейс связи с ПК -
5 — алгоритмы управления -
6 — сигнал о выключении стенда
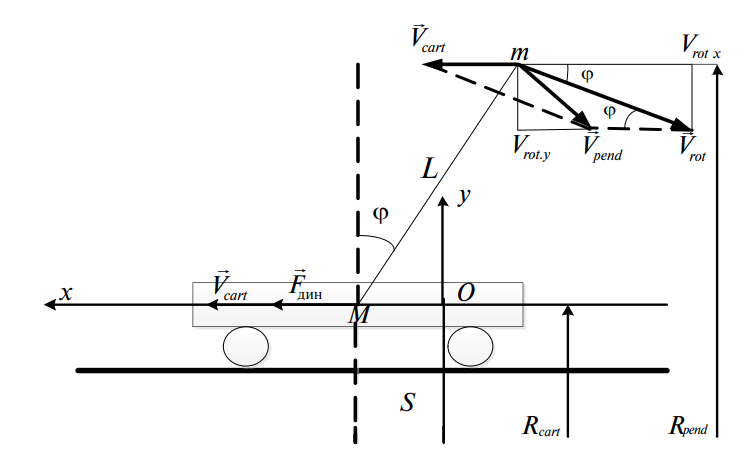
Математическое описание Объекта управления
-
S — перемещение тележки, [м]; -
 — угловое положение маятника, [рад];
— угловое положение маятника, [рад]; -
M — масса тележки, [кг]; -
m — масса маятника, [кг]; -
 — расстояние от тележки до центра Земли, [м];
— расстояние от тележки до центра Земли, [м]; -
 — расстояние от маятника до центра Земли, [м];
— расстояние от маятника до центра Земли, [м]; -
 – скорость маятника, [м/с];
– скорость маятника, [м/с]; -
 — вращательная составляющая скорости движения маятника, [рад/с];
— вращательная составляющая скорости движения маятника, [рад/с]; -
 — скорость тележки, [м/с];
— скорость тележки, [м/с]; -
 — динамическая сила, [Н];
— динамическая сила, [Н]; -
L — длина стержня, [м]; -
 — проекция на ось х;
— проекция на ось х; -
 — проекция на ось y
— проекция на ось y
Ход работы
Используемые переменные
%параметры объекта управления
m = 0.174; %[кг]
M = 1.321; %[кг]
L = 0.38; %[м]
g = 9.81; %[м/с^2]
J = 0.00099; %[кг м^2]
b = 0.05; %[н с/м]
d = 0.005; %[Н с м]
%Двигатель
Ra=2.5; % [Ом]
La = 0.0025; % [Гн]
Kb = 0.05; % [В/(рад/с]
Kt = 0.05; % [Н м/А]
Rk = 0.025; % [м]
b_vf=0.00568; % [Н с м]
T1 = [99.999: -0.001: 0];
T = rot90(T1);
%%%%%% Начальный угол маятника
% Верхнее положение маятника theta = 0 - неустойчивое равновесние
% Нижнее положение маятника theta = 180 - устойчивое равновесние
theta_g=180;%начальный угол ГРАД
theta_r=theta_g*pi/180;%начальный угол РАДИАН
-
Создаем модель двигателя постоянного тока
Используем блоки:
-
Sum -
Gain
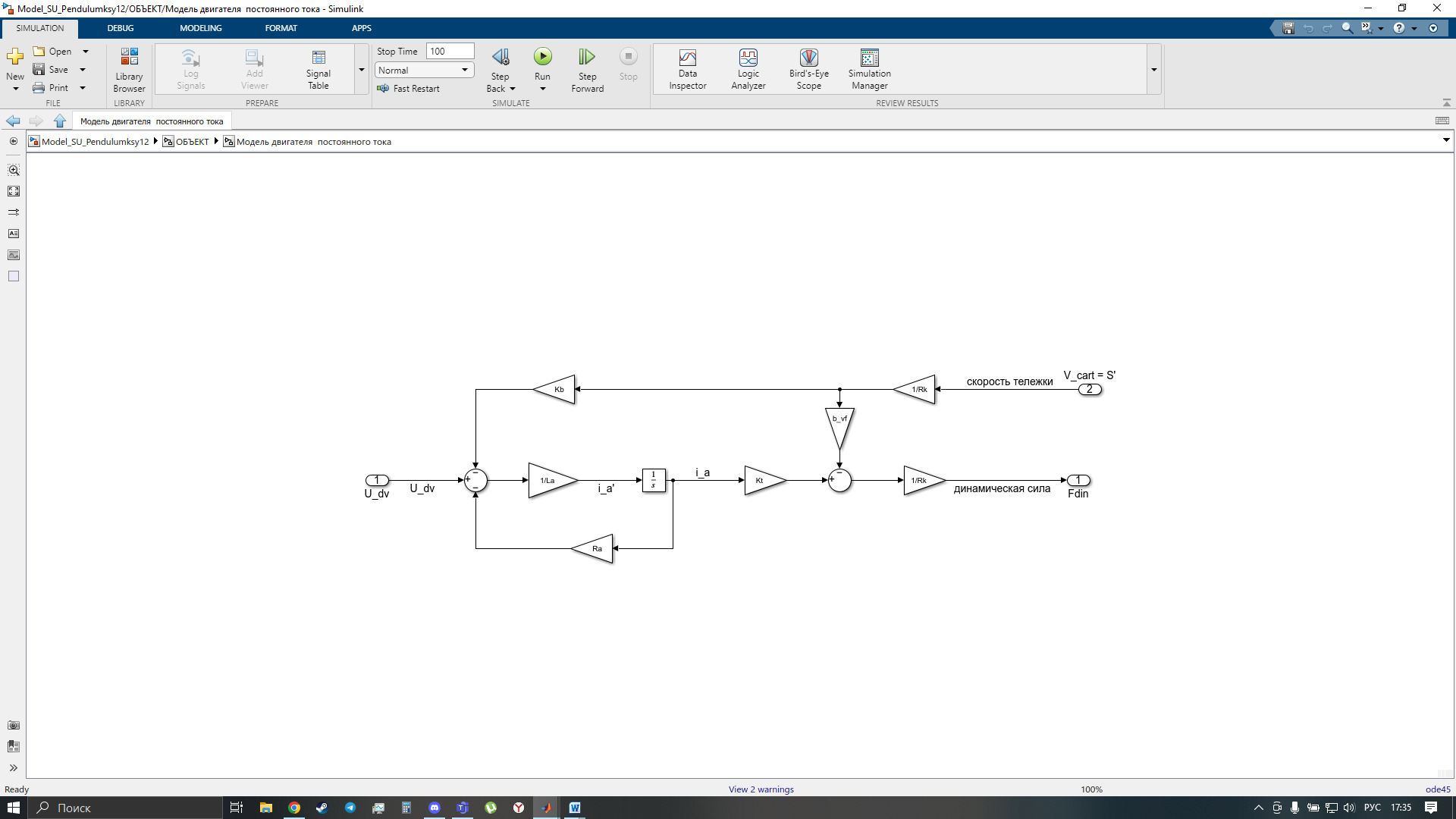
Рис. 1 модель двигателя
-
Создаем модель объекта
Используем блоки:
-
Sum -
Gain -
Trigonometric Function -
Product -
Math Function
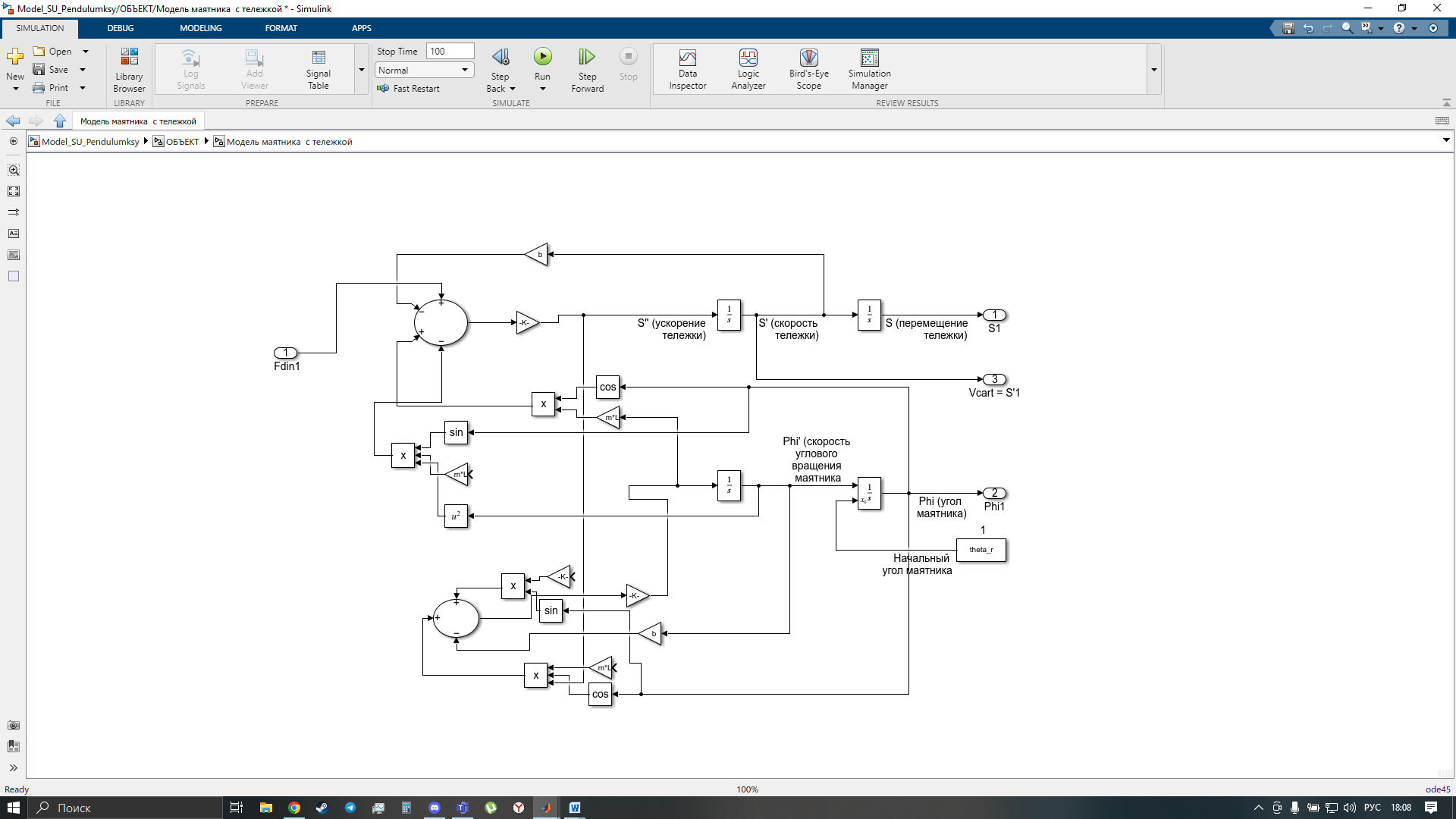
Рис. 2 модель объекта
-
Создаём и настраиваем регуляторы
Благодаря функции Tune мы может определить коэффициенты для PD Controller
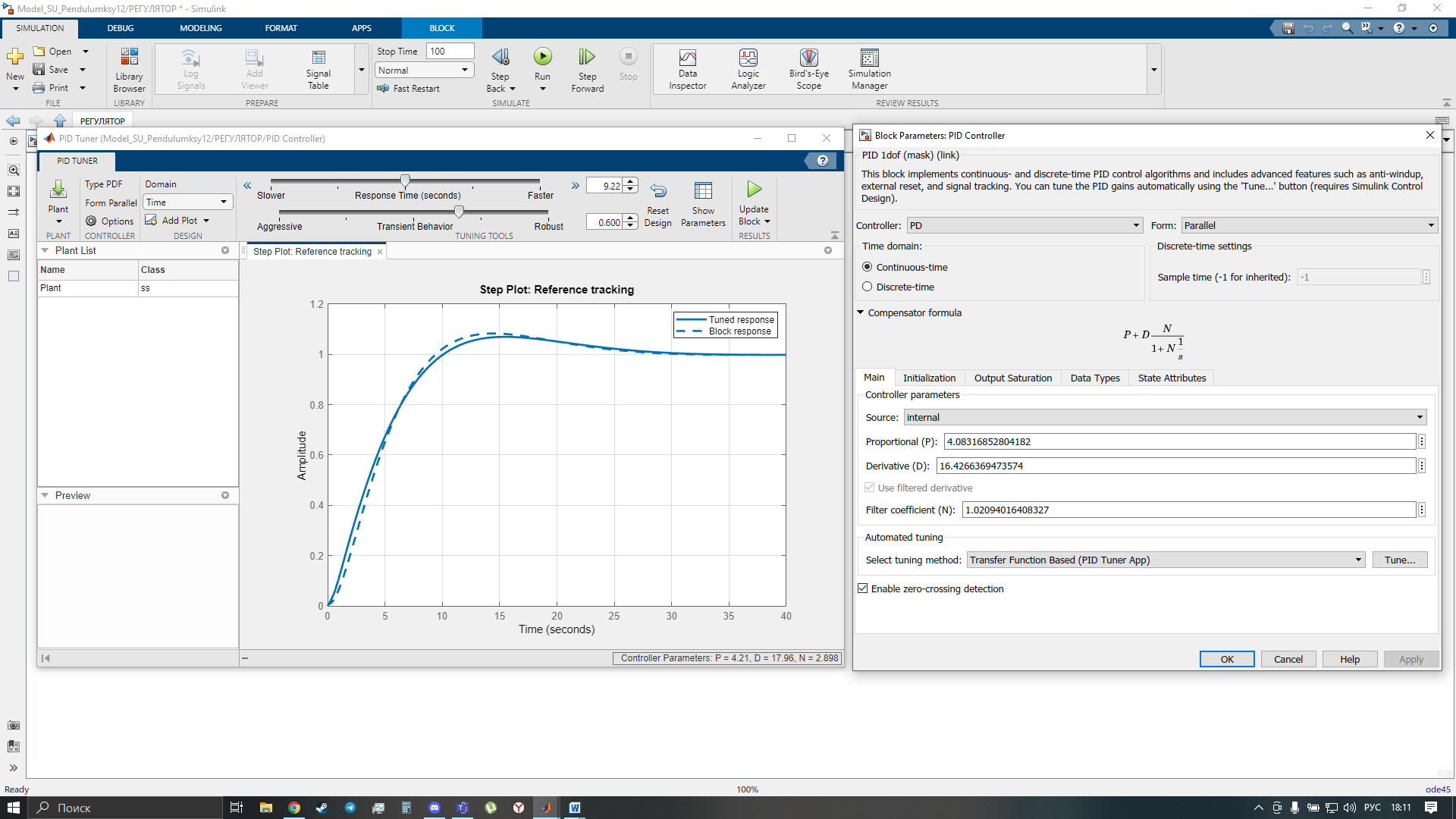
Рис. 3. настройка PD Controller(положение тележки)
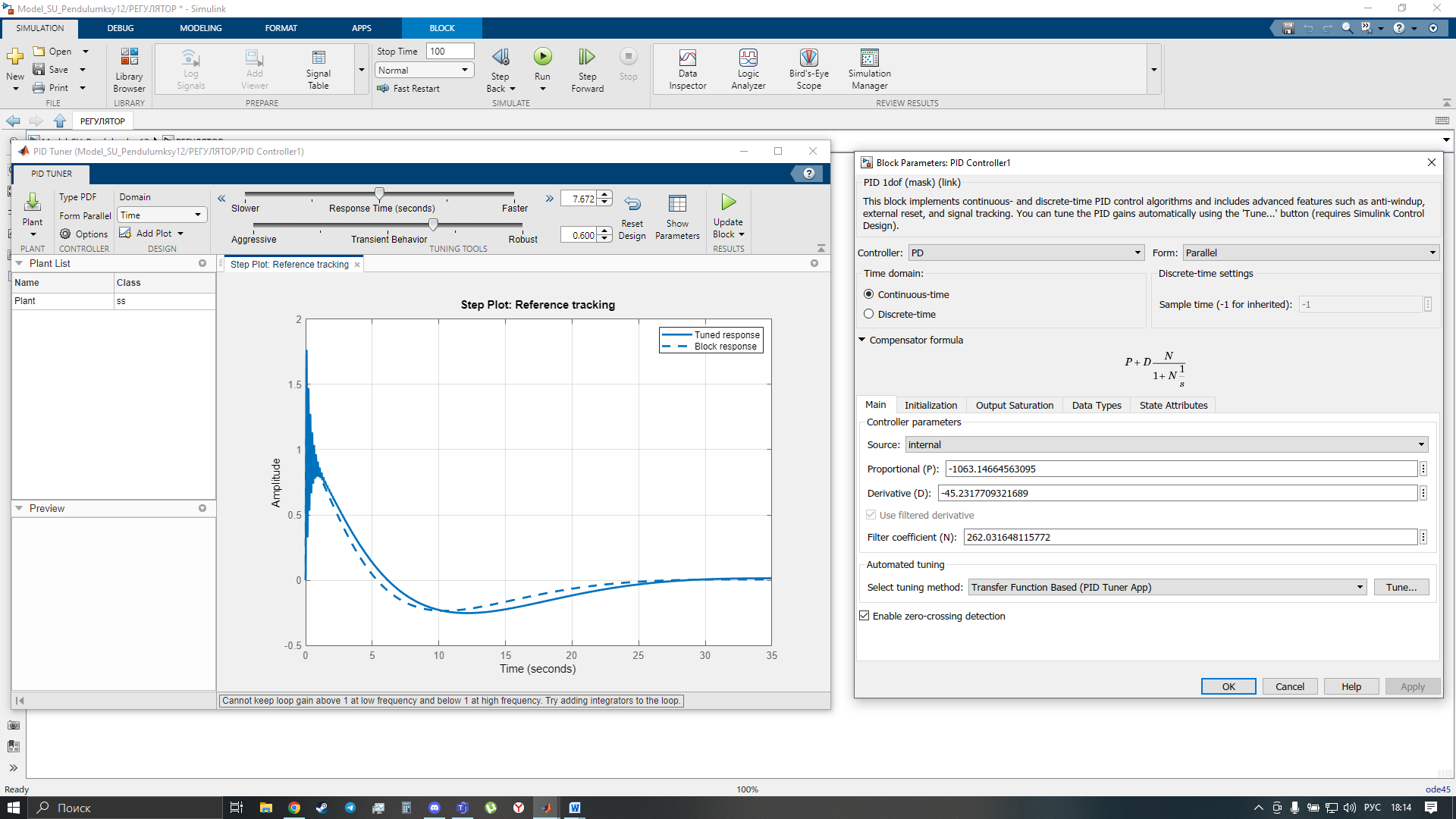
Рис. 4. Настройка PD Controller1(угла)
-
Проверка системы управления на виртуальной модели
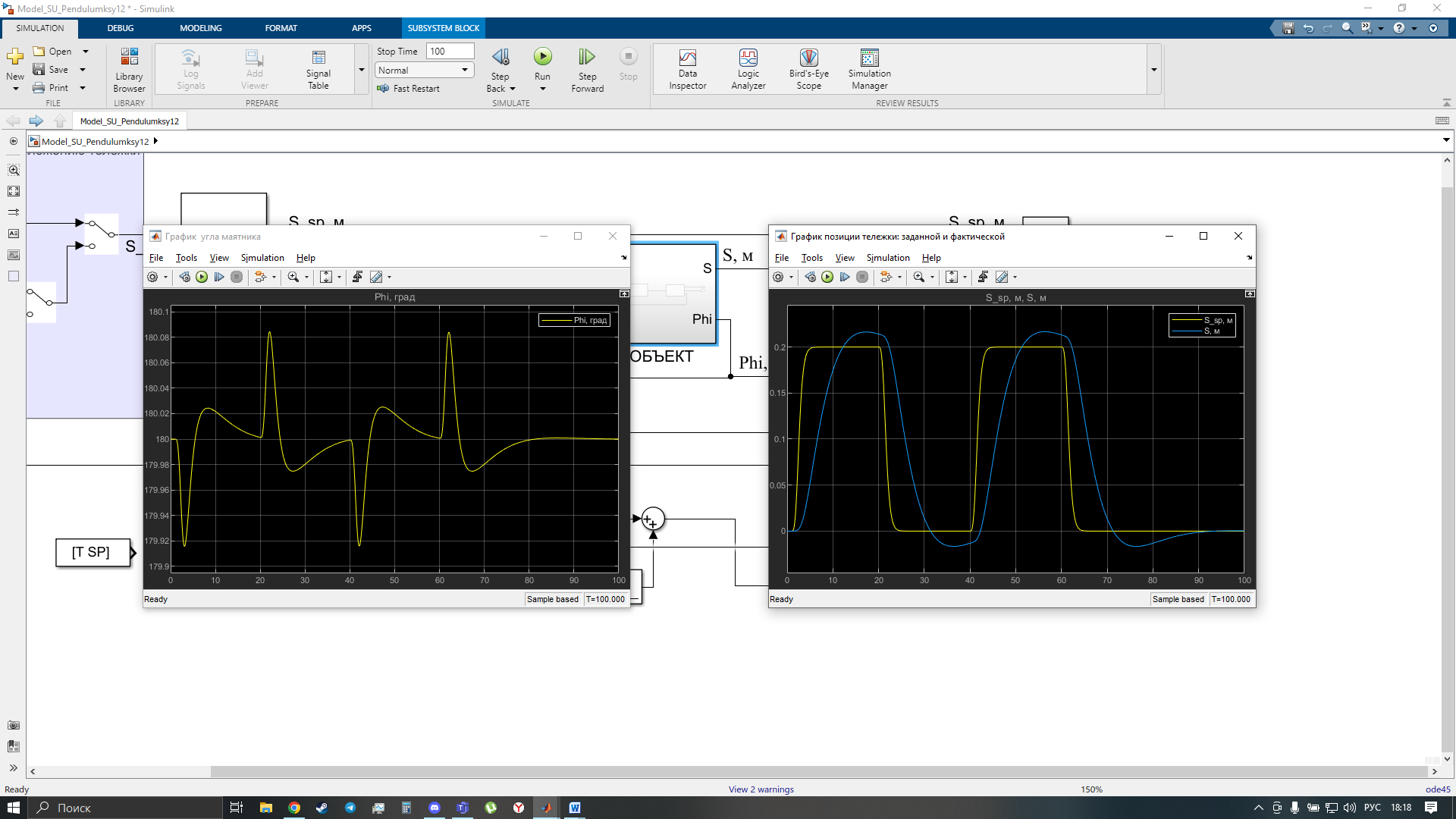
Рис. 5. Графики модели
5.Идентификация параметров объекта
Уточненные коэффициенты после параметрической идентификации:
b_vf=0.01856
J=0.0051345
d=0.01851
6.Проверка системы управления на виртуальной модели с значениями взятые с маятника
Используются значение маятника(S_sp)
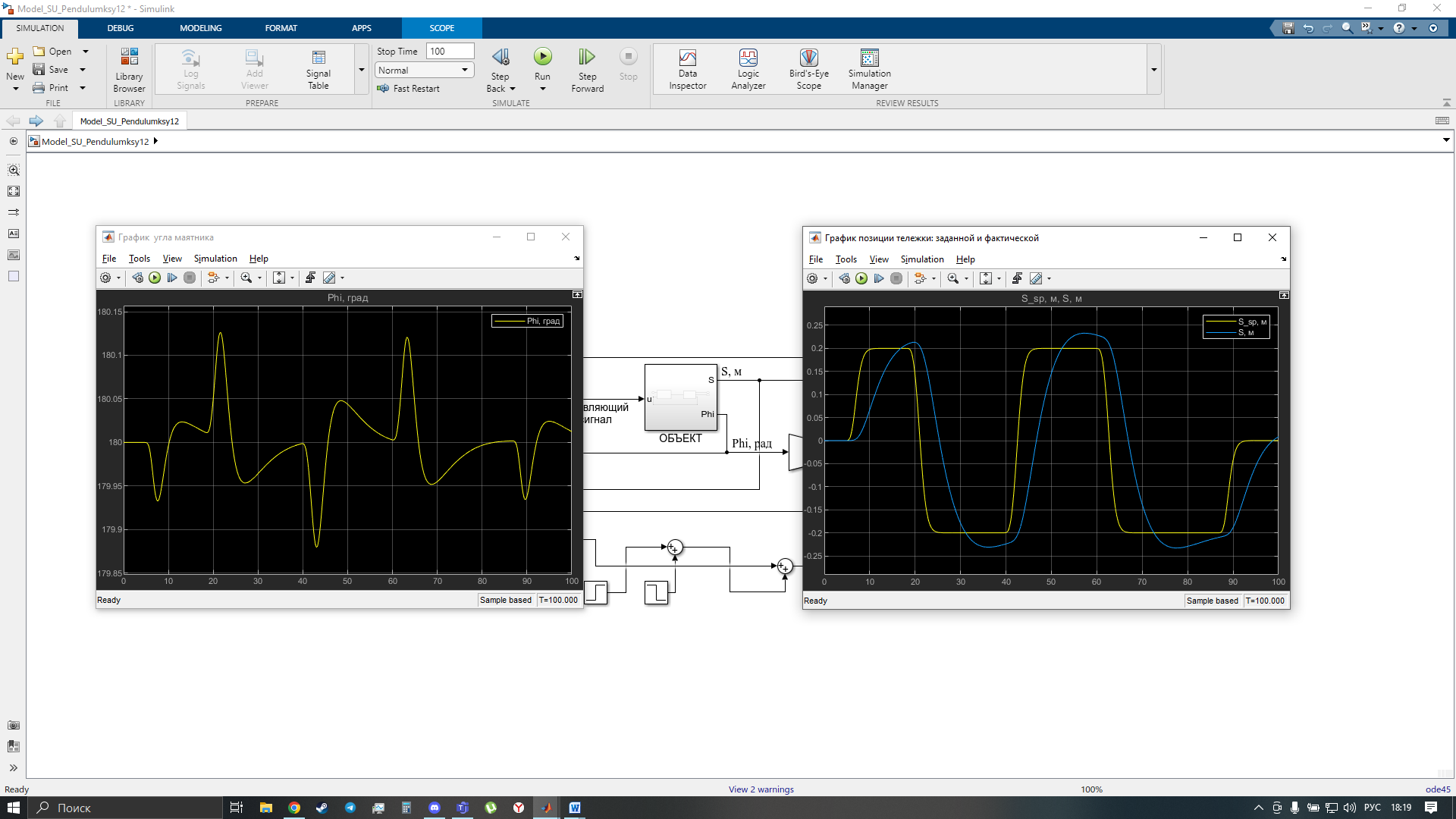
Рис. 6. Графики маятника
Вывод: В данной работе изучили принцип ПИД-регулятора, определили коэффициенты для положения тележки, а именно: P = 4, D =16 и N = 1, а для угла: P = -1063, D = -45 и N = 262. Сравнив графики, можно выяснить, что модели, почти совпадают с графиками маятника, отсюда следует, что ПИД-Регуляторы были настроены приближенно.