ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.12.2023
Просмотров: 63
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
, получим

Сопротивление фазы ротора

где Uрн=251 В – номинальное напряжение ротора [2 ст. 61].,
Iрн=330 А – номинальный ток ротора [2 ст. 61].
Полное сопротивление фазы ротора

Сопротивление реостата


Расчёт пусковых сопротивлений для электродвигателя 4АНК280М4УЗ ЛК-59.
Критическое скольжение на естественной характеристике

где, sн=2,6 % - номинальное скольжение двигателя [2 ст. 61,
λМ=2 – перегрузочная способность двигателя [2 ст. 61].
Определяем скольжение sе1 на естественной характеристике при моменте М1.
С учётом, что sе1 не может быть больше sке , получим

Сопротивление фазы ротора

где Uрн=300 В – номинальное напряжение ротора [2 ст. 61].,
Iрн=330 А – номинальный ток ротора [2 ст. 61].
Полное сопротивление фазы ротора

Сопротивление реостата

Расчёт пусковых сопротивлений для электродвигателя 4АНК225М4УЗ ЛК-62.
Критическое скольжение на естественной характеристике

где, sн=3,6 % - номинальное скольжение двигателя [2 ст. 61,
λМ=2,5 – перегрузочная способность двигателя [2 ст. 61].
Определяем скольжение sе1 на естественной характеристике при моменте М1.
С учётом, что sе1 не может быть больше sке , получим

Сопротивление фазы ротора

где Uрн=170 В – номинальное напряжение ротора [2 ст. 61].,
Iрн=200 А – номинальный ток ротора [2 ст. 61].
Полное сопротивление фазы ротора

Сопротивление реостата

В качестве промежуточного реле напряжения принимаю реле РН-50 с характеристикой:
- номинальное напряжение, В - - 380 ;
- напряжение срабатывания, В - - 320 ;
- время срабатывания, с. - - 0,15.
В качестве реле скорости использую магнитоиндукционный датчик ДМ с релейным усилителем. На рис. 107, а представлена схема установки магнитоиндукцион-иого датчика ДМ у поддерживающего ролика конвейера. При вращении ролика, на конце которого выполнено подобие звездочки, под сердечником периодически проходят металлические выступы
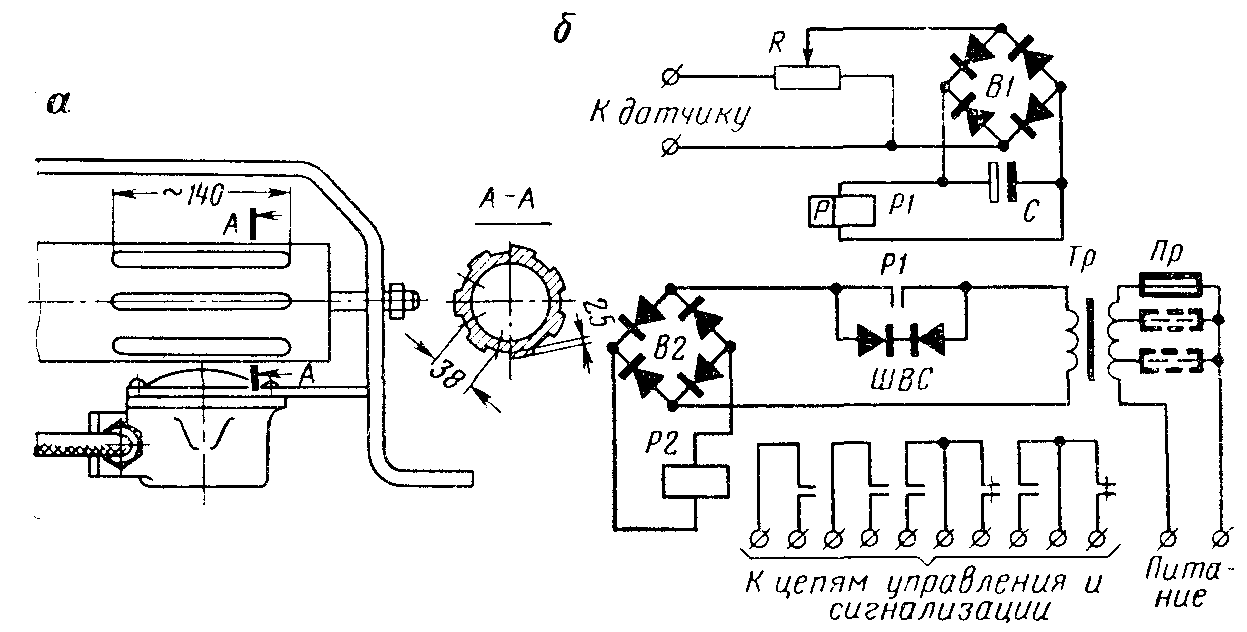
Рис. 107. Магнитоиндукционный датчик и релейный усилитель: а — схема установки датчика; б ■— схема релейного усилителя
и в обмотке датчика наводится э. д. с, достаточная для питания релейного усилителя (рис. 107, б). На выход обмотки датчика через двухполупериодный выпрямитель В1 подключается поляризованное реле Р1. При номинальной скорости вращения реле Р1 срабатывает и включает исполнительное реле Р2, которое получает питание от сети 127, 220 или 380 В.
Преимуществом магнитоиндукционного датчика является отсутствие непосредственного контакта с движущимися элементами конвейера, что обеспечивает большую надежность в работе и удобство в эксплуатации.
2.3. Автоматизация отвального комплекса.
Для управления отвальным комплексом и контроля работы конвейеров принимаю комплекс автоматизированного управления конвейерами АУК.1М.
Пульт управления имеет взрывобезопасный корпус, в котором закреплена съёмная часть с расположенными на ней элементами электрической схемы. На крышке корпуса имеются нажимные штоки трех кнопок: «Пуск», «Сигнал», «Стоп» и окно для наблюдения за состоянием лампы НЗ . Съёмная часть пульта управления вставляется в корпус по двум направляющим и крепится двумя болтами. На передней панели съёмной части расположен блок из четырех реле типа РКН, защищенных от механических повреждений несъемной поворотной крышкой из пластмассы.
Выносной прибор-указатель ВПУ выполнен в виде отдельного металлического корпуса, в котором расположены: прибор-указатель числа работающих конвейеров с лампами подсветки и настроечными резисторами, блок телефона и клемник для подключения кабеля, соединяющего ВПУ с пультом управления. ВПУ можно устанавливать не только возле пульта, но и на некотором расстоянии от него, в месте, удобном для обслуживающего персонала. В нижней части правой боковой стенки ВПУ имеется крючок для навески телефонной трубки.
Конструкция блока управления по общей компоновке элементов аналогична конструкции пульта управления и отличается следующим: передняя нижняя часть крышки корпуса имеет пять нажимных штоков для кнопок «Проверка», «Рем. — Авт.», «Разговор», «Сигнал» и «Стоп»; кнопка переключателя режимов работы «Рем.—-Авт.» может быть зафиксирована в положении «Рем.», а в положении «Авт.» — опломбирована; верхняя часть крышки имеет смотровое окно для наблюдения за показаниями прибора настройки реле скорости и состоянием ламп. На передней панели выемочной
части блока управления размещены: прибор контроля настройки реле скорости, блок реле скорости БРС, блок реле РКН, блок отсчета времени и телефона БОВТ и блок заштыбовки БЗ.
Блок дистанционного управления БДУ последним конвейером состоит из БОВТ, дополненного элементами дистанционного управления: реле дистанционного включения , конденсатором и перемычками, предназначенными для преобразования любого линейного блока в блок хвостового конвейера.
Блок концевого реле БКР имеет металлический корпус, в котором размещены: концевое реле типа РКН, диоды , резисторы и конденсатор .
Выполнение технологических команд и общий принцип работы комплекса. Пуск конвейерной линии осуществляется командами, выдаваемыми с пульта управления через линию связи на блоки управления. Порядок выполнения команд после кратковременного нажатия кнопки «Пуск» пульта управления следующий:
1) по линии подается предупредительный звуковой сигнал;
2) не менее чем через 5 с с пульта на первый блок управления поступит пусковая полярность;
3) с первого блока управления поступает сигнал включения пускателя первого конвейера, он запускается и от сигнала датчика скорости включится реле скорости;
4) пусковая полярность поступает на второй, затем на третий и т. д. блоки управления;
5) при включении реле скорости в последнем блоке управления пусковая полярность поступает в блок концевого реле БКР;
6) включается БКР и по линии сигнализации (провод 2„ «Земля») выдается команда на прекращение пуска на пульт управления;
7) на пульте происходит переключение пусковой полярности на рабочую, блок БКР отключается;
8) все конвейеры работают в режиме контроля заданных параметров (скорости, пробуксовки, заштыбовки и др.).
При необходимости запуска части конвейерной линии оператор в период пуска следит по прибору-указателю за числом включившихся конвейеров, а при включении требуемого числа нажатием кнопки «Сигнал» отключает реле КЗ, которое, в свою очередь, отключает реле К2, и дальнейший запуск прекращается. Запуск оставшихся конвейеров осуществляется аналогично пуску конвейеров линии.
Оперативный останов конвейерной линии осуществляется нажатием кнопки «Стоп» на пульте управления. При этом отключаются реле К5, К4 и реле К1 всех блоков управления. При; нажатии кнопки «Стоп» блока управления отключаются конвейер, управляемый данным блоком, и все последующие конвейеры.
Экстренное прекращение пуска осуществляется нажатием кнопки «Сигнал» пульта или любого блока управления, вызывающим прекращение запуска последующих конвейеров, кроме тех, которые достигли номинальной скорости рабочих органов.
Аварийный останов конвейера или экстренное прекращение запуска линии осуществляется замыканием накоротко голых проводов или воздействием на кабель-трос любого выключателя КТВ-2, обеспечивающего отключение аварийного и всех последующих конвейеров.
Аварийный останов и экстренное прекращение пуска происходит также при срабатывании средств защиты и контроля работы конвейеров при затянувшемся пуске, снижении скорости рабочего органа или его поперечном разрыве, срабатывании тепловой защиты, потере связи между редуктором и приводной звездочкой, утечке масла из турбомуфты.
Режим местного управления отдельным конвейером в комплексе АУК.1М назван ремонтно-наладочным («Рем».) с целью предупредительного напоминания, что применение его допустимо только при ремонте, наладке и настройке. При работе конвейера в режиме «Рем.» сохраняется действие всех видов защиты и контроля работы, что и в режиме «Авт.»
Управление отдельным конвейером в режиме «Рем.» осуществляется кнопками «Сигнал», «Проверка» и «Стоп» блока управления в таком порядке:
1) нажимаются кнопки «Сигнал» и «Проверка», которые после появления звукового сигнала отпускаются;
2) через 5—6 с после отпускания кнопок должен включиться конвейер, прекратиться звуковой сигнал и начаться процесс разгона рабочего органа.
Сопротивление фазы ротора
где Uрн=251 В – номинальное напряжение ротора [2 ст. 61].,
Iрн=330 А – номинальный ток ротора [2 ст. 61].
Полное сопротивление фазы ротора
Сопротивление реостата
Расчёт пусковых сопротивлений для электродвигателя 4АНК280М4УЗ ЛК-59.
Критическое скольжение на естественной характеристике
где, sн=2,6 % - номинальное скольжение двигателя [2 ст. 61,
λМ=2 – перегрузочная способность двигателя [2 ст. 61].
Определяем скольжение sе1 на естественной характеристике при моменте М1.
С учётом, что sе1 не может быть больше sке , получим
Сопротивление фазы ротора
где Uрн=300 В – номинальное напряжение ротора [2 ст. 61].,
Iрн=330 А – номинальный ток ротора [2 ст. 61].
Полное сопротивление фазы ротора
Сопротивление реостата
Расчёт пусковых сопротивлений для электродвигателя 4АНК225М4УЗ ЛК-62.
Критическое скольжение на естественной характеристике
где, sн=3,6 % - номинальное скольжение двигателя [2 ст. 61,
λМ=2,5 – перегрузочная способность двигателя [2 ст. 61].
Определяем скольжение sе1 на естественной характеристике при моменте М1.
С учётом, что sе1 не может быть больше sке , получим
Сопротивление фазы ротора
где Uрн=170 В – номинальное напряжение ротора [2 ст. 61].,
Iрн=200 А – номинальный ток ротора [2 ст. 61].
Полное сопротивление фазы ротора
Сопротивление реостата
В качестве промежуточного реле напряжения принимаю реле РН-50 с характеристикой:
- номинальное напряжение, В - - 380 ;
- напряжение срабатывания, В - - 320 ;
- время срабатывания, с. - - 0,15.
В качестве реле скорости использую магнитоиндукционный датчик ДМ с релейным усилителем. На рис. 107, а представлена схема установки магнитоиндукцион-иого датчика ДМ у поддерживающего ролика конвейера. При вращении ролика, на конце которого выполнено подобие звездочки, под сердечником периодически проходят металлические выступы
Рис. 107. Магнитоиндукционный датчик и релейный усилитель: а — схема установки датчика; б ■— схема релейного усилителя
и в обмотке датчика наводится э. д. с, достаточная для питания релейного усилителя (рис. 107, б). На выход обмотки датчика через двухполупериодный выпрямитель В1 подключается поляризованное реле Р1. При номинальной скорости вращения реле Р1 срабатывает и включает исполнительное реле Р2, которое получает питание от сети 127, 220 или 380 В.
Преимуществом магнитоиндукционного датчика является отсутствие непосредственного контакта с движущимися элементами конвейера, что обеспечивает большую надежность в работе и удобство в эксплуатации.
2.3. Автоматизация отвального комплекса.
Для управления отвальным комплексом и контроля работы конвейеров принимаю комплекс автоматизированного управления конвейерами АУК.1М.
Пульт управления имеет взрывобезопасный корпус, в котором закреплена съёмная часть с расположенными на ней элементами электрической схемы. На крышке корпуса имеются нажимные штоки трех кнопок: «Пуск», «Сигнал», «Стоп» и окно для наблюдения за состоянием лампы НЗ . Съёмная часть пульта управления вставляется в корпус по двум направляющим и крепится двумя болтами. На передней панели съёмной части расположен блок из четырех реле типа РКН, защищенных от механических повреждений несъемной поворотной крышкой из пластмассы.
Выносной прибор-указатель ВПУ выполнен в виде отдельного металлического корпуса, в котором расположены: прибор-указатель числа работающих конвейеров с лампами подсветки и настроечными резисторами, блок телефона и клемник для подключения кабеля, соединяющего ВПУ с пультом управления. ВПУ можно устанавливать не только возле пульта, но и на некотором расстоянии от него, в месте, удобном для обслуживающего персонала. В нижней части правой боковой стенки ВПУ имеется крючок для навески телефонной трубки.
Конструкция блока управления по общей компоновке элементов аналогична конструкции пульта управления и отличается следующим: передняя нижняя часть крышки корпуса имеет пять нажимных штоков для кнопок «Проверка», «Рем. — Авт.», «Разговор», «Сигнал» и «Стоп»; кнопка переключателя режимов работы «Рем.—-Авт.» может быть зафиксирована в положении «Рем.», а в положении «Авт.» — опломбирована; верхняя часть крышки имеет смотровое окно для наблюдения за показаниями прибора настройки реле скорости и состоянием ламп. На передней панели выемочной
части блока управления размещены: прибор контроля настройки реле скорости, блок реле скорости БРС, блок реле РКН, блок отсчета времени и телефона БОВТ и блок заштыбовки БЗ.
Блок дистанционного управления БДУ последним конвейером состоит из БОВТ, дополненного элементами дистанционного управления: реле дистанционного включения , конденсатором и перемычками, предназначенными для преобразования любого линейного блока в блок хвостового конвейера.
Блок концевого реле БКР имеет металлический корпус, в котором размещены: концевое реле типа РКН, диоды , резисторы и конденсатор .
Выполнение технологических команд и общий принцип работы комплекса. Пуск конвейерной линии осуществляется командами, выдаваемыми с пульта управления через линию связи на блоки управления. Порядок выполнения команд после кратковременного нажатия кнопки «Пуск» пульта управления следующий:
1) по линии подается предупредительный звуковой сигнал;
2) не менее чем через 5 с с пульта на первый блок управления поступит пусковая полярность;
3) с первого блока управления поступает сигнал включения пускателя первого конвейера, он запускается и от сигнала датчика скорости включится реле скорости;
4) пусковая полярность поступает на второй, затем на третий и т. д. блоки управления;
5) при включении реле скорости в последнем блоке управления пусковая полярность поступает в блок концевого реле БКР;
6) включается БКР и по линии сигнализации (провод 2„ «Земля») выдается команда на прекращение пуска на пульт управления;
7) на пульте происходит переключение пусковой полярности на рабочую, блок БКР отключается;
8) все конвейеры работают в режиме контроля заданных параметров (скорости, пробуксовки, заштыбовки и др.).
При необходимости запуска части конвейерной линии оператор в период пуска следит по прибору-указателю за числом включившихся конвейеров, а при включении требуемого числа нажатием кнопки «Сигнал» отключает реле КЗ, которое, в свою очередь, отключает реле К2, и дальнейший запуск прекращается. Запуск оставшихся конвейеров осуществляется аналогично пуску конвейеров линии.
Оперативный останов конвейерной линии осуществляется нажатием кнопки «Стоп» на пульте управления. При этом отключаются реле К5, К4 и реле К1 всех блоков управления. При; нажатии кнопки «Стоп» блока управления отключаются конвейер, управляемый данным блоком, и все последующие конвейеры.
Экстренное прекращение пуска осуществляется нажатием кнопки «Сигнал» пульта или любого блока управления, вызывающим прекращение запуска последующих конвейеров, кроме тех, которые достигли номинальной скорости рабочих органов.
Аварийный останов конвейера или экстренное прекращение запуска линии осуществляется замыканием накоротко голых проводов или воздействием на кабель-трос любого выключателя КТВ-2, обеспечивающего отключение аварийного и всех последующих конвейеров.
Аварийный останов и экстренное прекращение пуска происходит также при срабатывании средств защиты и контроля работы конвейеров при затянувшемся пуске, снижении скорости рабочего органа или его поперечном разрыве, срабатывании тепловой защиты, потере связи между редуктором и приводной звездочкой, утечке масла из турбомуфты.
Режим местного управления отдельным конвейером в комплексе АУК.1М назван ремонтно-наладочным («Рем».) с целью предупредительного напоминания, что применение его допустимо только при ремонте, наладке и настройке. При работе конвейера в режиме «Рем.» сохраняется действие всех видов защиты и контроля работы, что и в режиме «Авт.»
Управление отдельным конвейером в режиме «Рем.» осуществляется кнопками «Сигнал», «Проверка» и «Стоп» блока управления в таком порядке:
1) нажимаются кнопки «Сигнал» и «Проверка», которые после появления звукового сигнала отпускаются;
2) через 5—6 с после отпускания кнопок должен включиться конвейер, прекратиться звуковой сигнал и начаться процесс разгона рабочего органа.