Файл: Отчет По лабораторной работе по теме Исследование автоматизированной системы расчётов (аср) теплового объекта.docx
Добавлен: 09.12.2023
Просмотров: 244
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
">http://allbest.ru
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
Уфимский государственный нефтяной технический университет
Кафедра Автоматизации технологических процессов и производств
Отчет
По лабораторной работе
по теме: «Исследование автоматизированной системы расчётов (АСР) теплового объекта»
Выполнили ст.гр.: П.В. Бачурин, Е.И. Попова, Д.А. Файрузова
Проверил:старший преподаватель Р.М. Галиуллин
Уфа 2021
Цель работы: изучить особенности работы регуляторов, исследовать основные принципы регулирования одноконтурных АСР.
Описание установки
Исследуемая АСР состоит из объекта регулирования, датчика температуры (термопары), регулятора (контроллера) серии «YS 100» фирмы Йокогава (Yokogawa) и исполнительного устройства (симисторного преобразователя) (рисунок 1).
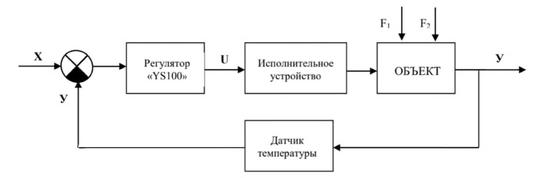
Рисунок 1 - Функциональная схема АСР
Краткое описание установки:
1) Объект управления (ОУ) – паяльник. Датчиком температуры является хромель-алюмелевая термопара (тип ТХА), установленная вместо жала паяльника.
Термопара работает следующим образом: имеются два провода из разнородных металлов, которые соединены друг с другом на одном конце, на другом конце данной конструкции за счет контактной разницы потенциалов появляется напряжение – термо-ЭДС, которое зависит от температуры.
Данное соединение двух металлов можно назвать гальваническим элементом.
2) Регулируемая величина – температура – физическая величина, которая подвергается регулированию.
3) Задающее воздействие (заданное значение регулируемого параметра, задание Х) – требуемое значение регулируемой величины, которое должен поддерживать регулятор.
4) Управляющее воздействие U- длительность импульсов напряжения (мощность), подаваемого на нагревательный элемент паяльника - воздействие, оказываемое регулятором на объект для компенсации действия возмущения или отработки задающего воздействия, если задание изменяется во времени.
5) Возмущающее воздействие F - изменения температуры окружающей среды и напряжения питания симисторного преобразователя – любое внешнее воздействие на объект, вызывающее нежелательное отклонение регулируемой величины от заданного значения.
6) Исполнительное устройство (симисторный преобразователь) управляет величиной (мощностью) переменного электрического тока, протекающего через паяльник.
Регулятор - совокупность устройств, обеспечивающих процесс регулирования без непосредственного участия человека.
Данные устройства присоединяются к регулируемому объекту и обеспечивают автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по определенному закону.
Функции регулятора реализует многофункциональный контроллер «YS150» или программируемый контроллер «YS170»серии «YS100» фирмы Йокогава.
Регулируемой величиной может быть температура, измеряемая термопарой, или любой параметр, который может быть преобразован в сигнал постоянного тока в пределах, 4-20 мА или 1-5В.
В исследуемой АСР ЭДС термопары унифицируется с помощью внешнего или встроенного в контроллер нормирующего преобразователя. Контроллер реализует ПИД закон регулирования, и в частности П и ПИ законы.
В программируемом контроллере «YS170» можно реализовать два независимых контура регулирования.
Регулятор может работать в ручном режиме, когда обратная связь отсутствует и оператор, изменяя задание, непосредственно воздействует на исполнительное устройство (рисунок 2) и в автоматическом режиме, когда обратная связь включена (рисунок 1).
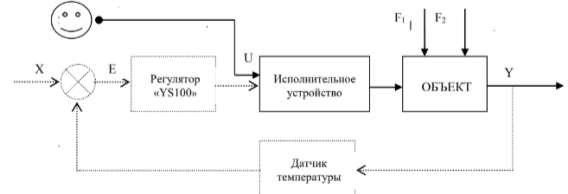
Рисунок 2 – Ручное и автоматическое регулирование
АСР, созданная на базе (контроллера) регулятора серии «YS100» может работать как система стабилизации (задание постоянно), следящая система (задание поступает извне и изменяется по заранее неизвестному закону), и как система программного регулирования (задание изменяется по программе).
С помощью (контроллеров) регуляторов серии «YS100» можно осуществить регулирование по отклонению, возмущению, комбинированное, каскадное и взаимосвязанное регулирование (последнее реализуется в программируемом контроллере «YS170»).
Кроме того, контроллеры серии «YS100» имеют встроенные функции самонастройки, позволяющие в процессе работы осуществлять идентификациюмодели процесса и по полученной модели рассчитывать оптимальные настройки регуляторапо нескольким критериям качества.
Регулятор реализует ПИД-закон регулирования, т.е. его можно представить как три параллельно работающих регулятора: пропорционального (П), интегрального (И) и дифференциального (Д) (см. рисунок 2).
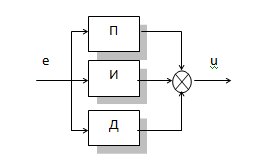
Рисунок 2
Передаточная функция ПИД – регулятора имеет следующий вид
W(s)= Kp(1+
 +TDs),
+TDs),где
Kp, TITD – параметры настройки (настроечные параметры), от которых существенно зависит процесс регулирования;
Kp– коэффициент усиления (пропорциональности);
TI – постоянная времени интегрирования;
TD – постоянная времени дифференцирования.
На практике вместо коэффициента усиления Kp используется обратная ему величина, называемая пределом пропорциональности РВ и выражаемая, как правило, в процентах
РВ = 100/Kp%.
При аналитических расчетах часто используют следующую форму записи передаточной функции регулятора:
W(s)=К1+К0/s+K2s,
где
К1,К0,K2 называются коэффициентами усиления пропорциональной, интегральной и дифференциальной частей регулятора соответственно.
Они связаны с настроечными параметрами регулятора следующим формулами:
К1= Кр=100/РВ
К0=Кр/TI
К2=Кр*TI
Работа в ручном режиме
Данные статического режима (статическая характеристика) объекта регулирования приведены в таблице 1.
Таблица 1
| Управляющее воздействие MV% | 0 | 10 | 20 | 21,8 |
| Регулируемая величина PV, 0С | 14,7 | 37,9 | 59,4 | ≈100 |
-
График статического режима при MV=0%

-
График статического режима при MV=10%

-
График статического режима при MV=20%

Работа в автоматическом режиме
В автоматическом режиме необходимо экспериментально получить и зарисовать переходные характеристики замкнутой АСР при скачкообразном изменении задания.
Из Циглера-Николса определить оптимальные настройки регулятора. Запустить процедуру самонастройки. Работа осуществляется в следующей последовательности:
1 После перехода в автоматический режим, обратить внимание, что ошибка регулирования равна нулю, т.е. произошел так называемый безударный переход.
Наблюдать некоторое время за процессом и убедиться, что график PV горизонтальная прямая (статика).
2 Скачком (по возможности) установить задание регулятору равным ≈100°С, наблюдать переходный процесс до его завершения. Зарисовать переходный процесс. Занести в таблицу 1 установившиеся значения MV и PV (не SV).
3 Обратить внимание на наличие статической ошибки. Установившееся значение регулируемой величины PV не равно заданию SP.
Это объясняется наличием статической ошибки в системах с П – регулятором. Записать значение статической ошибки и настроек регулятора.

График переходного процесса
Определение оптимальных параметров регуляторов по методике Циглера-Николса
Метод Циглера-Николса (предложен 1942 г.) позволяет на основе не сложного эксперимента определить исходные данные и по ним рассчитать оптимальные настройки типовых П–, ПИ- и ПИД регуляторов.
Цель эксперимента – определить критический коэффициент усиления П– регулятора
 и период не затухающих колебаний Тпер. регулируемой величины на границе устойчивости.
и период не затухающих колебаний Тпер. регулируемой величины на границе устойчивости. По значениям
и Тперпо формулам, приведенным в таблице 2 определяются оптимальные настройки регуляторов.
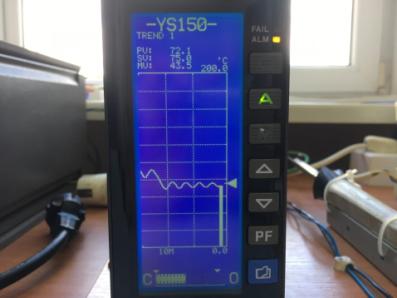
График незатухающих колебаний.
По графику находим Тпер и Кр: РВкрит= 5%.
Тпер= 8*0,28*60=134 сек
Kркрит = 100/РВкр = 100/5=20
Таблица 2 – Оптимальные настройки регуляторов
| Параметры настройки /Регулятор | РВ, К1 | TI, K0 | TD, K2 |
| П-регулятор | РВопт=10 К1опт=10 | – | – |
| ПИ-регулятор | РВопт=11 К1опт =9 | TI=111 K0=0,08 | – |
| ПИД-регулятор | РВопт=8,5 К1опт =12 | TI=67 K0=0,18 | TDопт=17 K2опт=201 |
Для П-регулятора:
одноконтурный автоматический тепловой регулятор
РВопт=2РВкрит=2*5=10

К1опт =0,5Кркрит=0,5*20=10
Для ПИ-регулятора:
РВопт=2,2РВкрит=2,2*5=11
TI=0,83Тпер=111
К1опт =0,45Кркрит=0,45*20=9
K0=0,54Кркрит/Тпер=0,08
Для ПИД-регулятора:
РВопт=1,7РВкрит=1,7*5=8,5
TI=0,50*Тпер=67
К1опт =0,6*Кркрит=0,6*20=12
K0=1,18Кркрит/Тпер=0,18
TD=Тпер /8=134/8=17
K2=0,075Кркрит*Тпер = 201
Графики регуляторов:
П-регулятор

ПИ – регулятор

ПИД – регулятор

Вывод
В ходе данной лабораторной работы были изучены особенности работы П-, ПИ- и ПИД-регуляторов, исследованы основные принципы регулирования и свойства одноконтурных АСР. Были определены статическая характеристика объекта, переходные характеристики. Методом Циглера-Николса определили оптимальные настройки регулятора, а затем исследовали переходные кривые.