ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 122
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ст = (М0 + М2) < Мmах.
16. Начертите рабочие характеристики АД и поясните их вид.
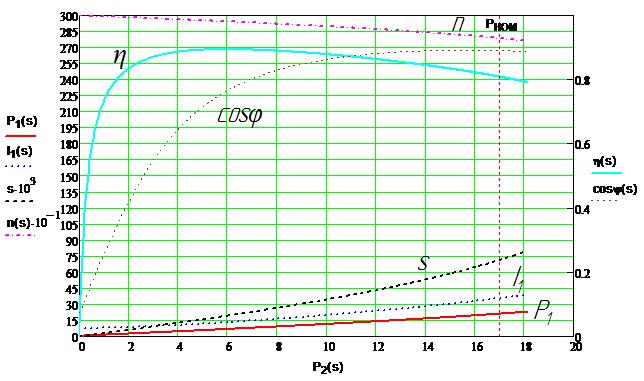
Рабочие характеристики асинхронного двигателя (рис. 2.7) представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя
n2 = n1(1 - s).
Скольжение
s = Pэ2/ Pэм,
т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности Рэм.
Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу двигателя отношение Pэ2/ Pэм, растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с этим зависимость n2=f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе.
Зависимость М2 =f(P2). Зависимость полезного момента на валу двигателя М2 от полезной мощности Р2 определяется выражением
M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2=const, то график М2=f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается
, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
31. Построите графики зависимостей токов ротора и статора и от частоты вращения АД и объясните их?
Электромеханической характеристикой АД называют зависимость между угловой скоростью ротора со (или скольжением) и током статора I1 или током ротора I2.
Для асинхронного двигателя существуют два типа электромеханических характеристик
I1(S) – ток статора от скольжения;
I’2(S) – ток ротора от скольжения.
Из уравнения электромеханической характеристики двигателя
 ,
,
можно отметить, что при отрицательном скольжении (знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины) приведенное значение тока ротора выше в генераторном режиме работы, что объясняет асимметричность графика электромеханической характеристики.

Из графика видно, что при скольжении S0 функция I’2(S) возрастает монотонно, а при скольжении меньше нуля функция имеет максимум .
.
Рисунок 2.8 - Зависимость токов ротора и статора
от частоты вращения АД.
16. Начертите рабочие характеристики АД и поясните их вид.
Рабочие характеристики асинхронного двигателя (рис. 2.7) представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя
n2 = n1(1 - s).
Скольжение
s = Pэ2/ Pэм,
т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности Рэм.
Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу двигателя отношение Pэ2/ Pэм, растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с этим зависимость n2=f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе.
Рисунок 2.7 - Рабочие характеристики асинхронного двигателя.
Зависимость М2 =f(P2). Зависимость полезного момента на валу двигателя М2 от полезной мощности Р2 определяется выражением
M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2=const, то график М2=f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается
, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
31. Построите графики зависимостей токов ротора и статора и от частоты вращения АД и объясните их?
Электромеханической характеристикой АД называют зависимость между угловой скоростью ротора со (или скольжением) и током статора I1 или током ротора I2.
Для асинхронного двигателя существуют два типа электромеханических характеристик
I1(S) – ток статора от скольжения;
I’2(S) – ток ротора от скольжения.
Из уравнения электромеханической характеристики двигателя
,можно отметить, что при отрицательном скольжении (знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины) приведенное значение тока ротора выше в генераторном режиме работы, что объясняет асимметричность графика электромеханической характеристики.
Из графика видно, что при скольжении S0 функция I’2(S) возрастает монотонно, а при скольжении меньше нуля функция имеет максимум
. Рисунок 2.8 - Зависимость токов ротора и статора
от частоты вращения АД.