Файл: Оптимизация конструкции и механические исследования подъемного механизма многофункционального автовоза Аннотация.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.01.2024
Просмотров: 45
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
в уравнении (18) можно получить из уравнения (17)(18)ФБ′"="ФБ"="−гАпотому что(�−�А)грех�лА"="гАпотому что�Агрех�лАгдеФБ′иФБпредставляют собой пару действие и противодействие.
В качестве объекта исследования принята шарнирная точка О , как показано на рис. 8 . Уравнения равновесия вдоль направлений x и y устанавливаются как(19)∑ФИкс"="ФБ′потому что�Б+ФСпотому что(�−�С)+Фоялпотому чтоф"="0(20)∑Фу"="ФБ′грех�Б−ФСгрех(�−�С)−Фоялпотому чтоф"="0
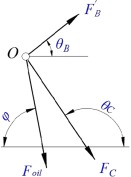
Рисунок 8 . Схематическая диаграмма сил, действующих на шарнир О.
Используя уравнения (19) и (20) , мы можем получить требуемую тягу гидроцилиндра, выраженную в уравнении. (21)(21)Фоял"="грех�Б−потому что�Бзагар�Сгрехф+потому чтофзагар�СФБ′
2.3 . Анализ результатов расчетов подъемного механизма
Предполагается, что процесс подъема верхней площадки представляет собой равномерное подъемное движение. Правила изменения требуемой тяги гидроцилиндра и горизонтального тягового усилия, воздействующего на переднюю колонну, при удлинении гидроцилиндра можно получить с помощью программы на Фортране, как показано на Рис. 9 и Рис . 10 .
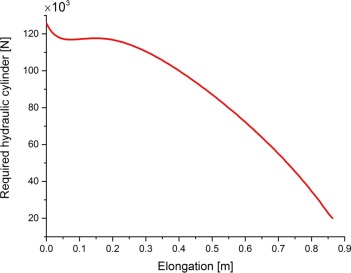
Рисунок 9 . Требуемая тяга гидроцилиндра в зависимости от удлинения гидроцилиндра.
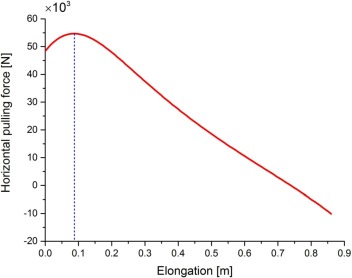
Рисунок 10 . Угол передачи γ и кривая его изменения.
Что касается явления трудности подъема и блокировки подъема, первым фактором, который следует учитывать, является то, может ли тяга гидравлического цилиндра соответствовать требованиям подъема или нет. Однако из рис. 9 видно , что максимальное значение требуемой тяги гидроцилиндра составляет около 126 кН в начальный момент подъема, бортовая гидросистема способна удовлетворить это требование. Фактически трудность подъема и блокировка подъема возникают не в начальный момент, а вскоре после начала подъема, угол которого между верхней площадкой и горизонтальной плоскостью находится в пределах от 5° до 6°. Как известно, угол передачи
γмежду верхней платформой и стрелой — важный физический параметр, влияющий на подъемные характеристики, чем больше, тем лучше. Угол передачи γ и кривая его изменения в зависимости от удлинения гидроцилиндра представлены на рис. 10 . Угол передачи γ составляет 37,5° в начале подъема, достигает минимального значения 33,5°, а затем неуклонно увеличивается с увеличением удлинения. Момент, когда угол передачи γ достигает минимального значения, совпадает с моментом возникновения трудности подъема, блокировки подъема и максимального горизонтального тягового усилия, как показано на рис. 11.. Таким образом, мы делаем вывод, что неразумная конструкция существующего заднего подъемного механизма является основной причиной проблем.
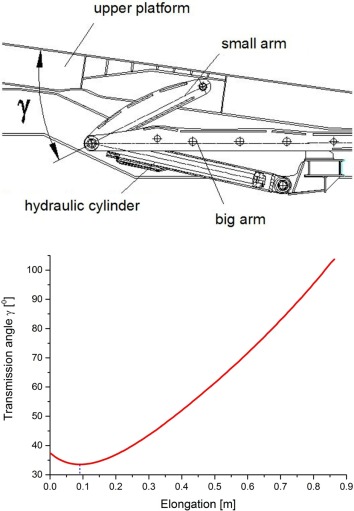
Рисунок 11 . Горизонтальное тяговое усилие, действующее на переднюю стойку, в зависимости от удлинения гидравлического цилиндра.
3 . Оптимизация конструкции подъемного механизма и его динамический анализ
3.1 . Оптимизация конструкции оригинального подъемного механизма
При оптимизации конструкции подъемного механизма следует учитывать некоторые ограничивающие условия, например, расстояние по вертикали между верхней платформой и нижней рамой транспортного средства должно быть не менее 2,1 м, а существующая гидравлическая система, установленная на транспортном средстве, должна продолжать работать. использовал. Принимая во внимание ограничивающие условия и ссылаясь на подъемный механизм Маллели самосвала ( Li and Liang, 1992 ), мы предлагаем в этой статье комбинированный подъемный механизм с задним толкателем для замены существующего заднего подъемного механизма, как показано на рис. 12 .. Для оптимизированного подъемного механизма угол передачи постепенно увеличивается в процессе подъема, так что он имеет хорошие подъемные характеристики. Для автовоза принят оптимизированный подъемный механизм, требуемая тяга гидроцилиндра должна быть не более 120 кН, а горизонтальное усилие, прикладываемое к передней стойке, должно быть не более 20 кН.
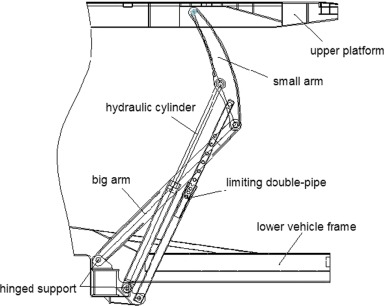
Рисунок 12 . Задний толкатель комбинированный подъемный механизм.
3.2 . Динамический анализ оптимизированного подъемного механизма
Динамический анализ оптимизированного подъемного механизма проводится по той же методике, что и в разделе 2 . На рис. 13 видно, что потребная тяга гидроцилиндра монотонно уменьшается с удлинением гидроцилиндра, максимальное значение составляет 114,5 кН, что уменьшается на 9,1 % по сравнению с таковой до оптимизации. Аналогично, на рис. 14 показано, что горизонтальное тяговое усилие, действующее на переднюю стойку, монотонно уменьшается с удлинением гидроцилиндра, максимальное значение составляет 15,0 кН, что уменьшается на 72,6 % по сравнению с таковым до оптимизации.
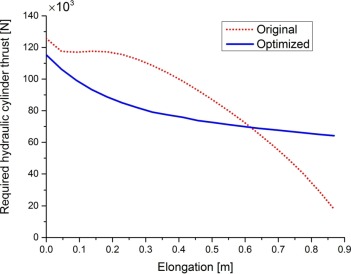
Рисунок 13 . Сравнение требуемой тяги гидроцилиндра оригинального подъемного механизма и оптимизированного подъемного механизма.
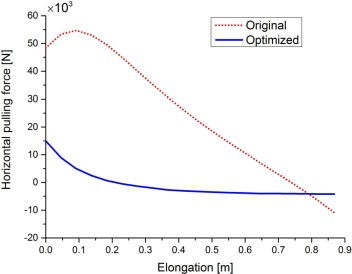
Рисунок 14 . Сравнение горизонтального тягового усилия оригинального подъемного механизма и оптимизированного подъемного механизма.
Динамический анализ подъемного механизма является лишь схематичным расчетом, необходимо провести подробный МКЭ для всей рамы транспортного средства.
4 . Анализ методом конечных элементов всей рамы автомобиля
Чтобы получить более надежные рабочие параметры и более точное распределение прочности и деформации основных компонентов, был выполнен МКЭ всей рамы автомобиля.
4.1 . Создание конечно-элементной модели
В соответствии с геометрическими характеристиками и условиями нагрузки каждого компонента для моделирования выбираются соответствующие элементы. Боковые балки с обеих сторон верхней платформы, плиты передней колонны
, большой рычаг и малый рычаг подъемного механизма представляют собой конструкции из тонких пластин, поэтому для их моделирования используются элементы SHELL181. Элементы BEAM188 используются для имитации поперечных балок, продольных балок и штифтового вала. Гидравлический цилиндр и цепь моделируются элементами LINK180. Шарнирные соединения, расположенные в таких местах, как большая рука-шарнирная опора, малая рука-верхняя платформа, гидроцилиндр-шарнирная опора и большая рука-малая рука-гидроцилиндр, моделируются с использованием элементов MPC184 (Ma et al . ., 2020), где генерируются общие узлы, которые используются для создания шарнирных соединений. В целях сохранения целостности рамы транспортного средства в целом некоторые детали, которые не оказывают очевидного влияния на общее распределение напряжений, такие как небольшие закругленные углы, фаски и ненагруженные небольшие круглые отверстия, удаляются при упрощении рамы транспортного средства. На рис. 15 представлена конечно-элементная модель подъемного механизма .
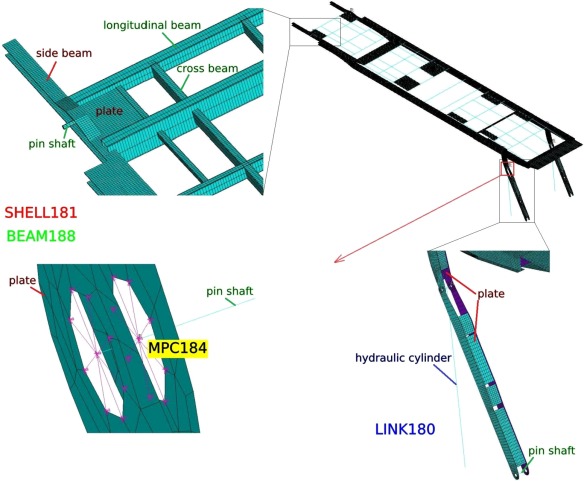
Рисунок 15 . Конечно-элементная модель подъемного механизма.
Передняя колонна соединена с верхней площадкой через штифтовой вал, включающий в себя встроенный гидроцилиндр, подвижную звездочку, две неподвижные звездочки, цепь, гидроцилиндр-ползун, верхнюю платформу-ползун, как показано на рис. 16 . Согласно эквивалентному принципу величины и направления сил система звездочек и цепей внутри передней колонны моделируется структурой «эквивалентного треугольника» ( Lu et al., 1998 ; Wang and Zhou, 2005 ). На рис. 17 показана простая система звездочки и цепи, если не учитывать потери эффективности, силаС1прикладываемая к намотке цепи, равна силеС2применяется для намотки цепи. В то же время перемещение твердого телаС1в равной степени передаетсяС2. Точки a и b — это две точки касания, из которых цепь наматывается на звездочку и выходит из нее. Соедините точки a и центральную точку O звездочки, чтобы создать первый шарнирный элемент LINK180, соедините точки b и O , чтобы создать второй шарнирный элемент LINK180, и соедините точки a и b.для создания третьего шарнирного элемента LINK180, образуя таким образом структуру так называемого «эквивалентного треугольника». Очевидно, что конструкция «эквивалентный треугольник» может обеспечить передаточные отношения силы и перемещения в системе «звездочка-цепь» при условии линейных малых перемещений. Эквивалентные конечно-элементные модели системы звездочки и цепи, в которых отключено отображение форм элементов на основе реальных постоянных описаний ( рис. 18 а) и включено отображение форм элементов на основе реальных постоянных описаний ( рис. 18 б) получаются.
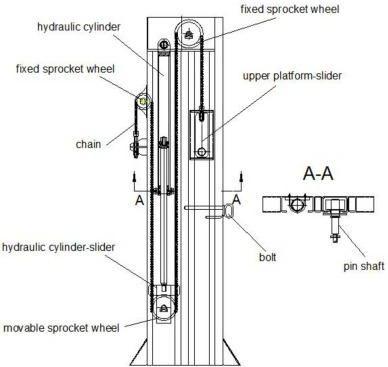
Рисунок 16 . Структурная схема передней колонны.
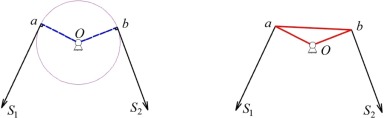
Рисунок 17 . Структура «эквивалентный треугольник».
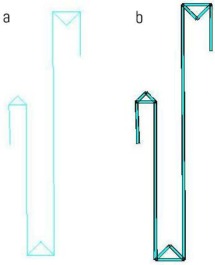
Рисунок 18 . Эквивалентные конечно-элементные модели системы звездочки и цепи: (a) отображение форм элементов на основе реальных постоянных описаний отключено, (b) отображение форм элементов на основе реальных постоянных описаний включено.
Соединения между верхней платформой-ползунком и передней плитой стойки, а также между гидроцилиндром-ползунком и передней плитой стойки реализованы посредством контактного алгоритма (Httori and Serpa, 2015 ; Korayem et al., 2021 ; Tian et al. , 2021 ; Сан и др., 2005 ). Чтобы уменьшить статическую неопределенность системы звездочки и цепи, вызванную движением твердого тела, в структуре «эквивалентного треугольника» устанавливается жесткая область, ограничивающая систему звездочки и цепи.
Боковые балки верхней платформы, плиты передней колонны, большой и малый рычаги изготовлены из высокопрочной стали Т700Л, модуль упругости которой составляет 210 ГПа, предел текучести не менее 700 МПа, предел прочности при растяжении не менее более 800 МПа, а коэффициент Пуассона равен 0,307 ( Duarte et al., 2021 ; Šmak et al., 2021 ). В качестве материала других компонентов используется Q345B, модуль упругости которого составляет 206 ГПа, предел текучести не менее 340 МПа, предел прочности при растяжении находится в диапазоне от 490 МПа до 620 МПа, а коэффициент Пуассона составляет 0,28 (Вен, 2010 ) .
4.2 . Трактовки граничных условий и приложенных нагрузок
Узлы в нижней части переднего столбца накладываются на все ограничения. Чтобы смоделировать шарнирные соединения между гидроцилиндром и шарнирной опорой, а также между большим плечом и шарнирной опорой, мы освобождаем вращательную степень свободы вокруг оси штифта и ограничиваем все поступательные степени свободы и другие вращательные степени свобода. Вес трех вагонов, загруженных на верхнюю платформу, составляет 80 кН, приложенных к местам контакта между шинами и верхней платформой в виде сосредоточенной силы. После завершения моделирования верхней платформы ее вес должен составлять 40 кН, если масса верхней платформы не 4000 кг, ее можно скорректировать методом компенсации массы (Botero et al., 2017) .). Учитывая тот факт, что вес загруженных вагонов и верхней платформы фиксирован, в конечно-элементной модели не учитываются нагрузки, зависящие от времени.
В качестве объекта исследования принята шарнирная точка О , как показано на рис. 8 . Уравнения равновесия вдоль направлений x и y устанавливаются как(19)∑ФИкс"="ФБ′потому что�Б+ФСпотому что(�−�С)+Фоялпотому чтоф"="0(20)∑Фу"="ФБ′грех�Б−ФСгрех(�−�С)−Фоялпотому чтоф"="0
-
Скачать : Скачать изображение в высоком разрешении (19 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 8 . Схематическая диаграмма сил, действующих на шарнир О.
Используя уравнения (19) и (20) , мы можем получить требуемую тягу гидроцилиндра, выраженную в уравнении. (21)(21)Фоял"="грех�Б−потому что�Бзагар�Сгрехф+потому чтофзагар�СФБ′
2.3 . Анализ результатов расчетов подъемного механизма
Предполагается, что процесс подъема верхней площадки представляет собой равномерное подъемное движение. Правила изменения требуемой тяги гидроцилиндра и горизонтального тягового усилия, воздействующего на переднюю колонну, при удлинении гидроцилиндра можно получить с помощью программы на Фортране, как показано на Рис. 9 и Рис . 10 .
-
Скачать : Скачать изображение в высоком разрешении (42 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 9 . Требуемая тяга гидроцилиндра в зависимости от удлинения гидроцилиндра.
-
Скачать : Скачать изображение в высоком разрешении (48 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 10 . Угол передачи γ и кривая его изменения.
Что касается явления трудности подъема и блокировки подъема, первым фактором, который следует учитывать, является то, может ли тяга гидравлического цилиндра соответствовать требованиям подъема или нет. Однако из рис. 9 видно , что максимальное значение требуемой тяги гидроцилиндра составляет около 126 кН в начальный момент подъема, бортовая гидросистема способна удовлетворить это требование. Фактически трудность подъема и блокировка подъема возникают не в начальный момент, а вскоре после начала подъема, угол которого между верхней площадкой и горизонтальной плоскостью находится в пределах от 5° до 6°. Как известно, угол передачи
γмежду верхней платформой и стрелой — важный физический параметр, влияющий на подъемные характеристики, чем больше, тем лучше. Угол передачи γ и кривая его изменения в зависимости от удлинения гидроцилиндра представлены на рис. 10 . Угол передачи γ составляет 37,5° в начале подъема, достигает минимального значения 33,5°, а затем неуклонно увеличивается с увеличением удлинения. Момент, когда угол передачи γ достигает минимального значения, совпадает с моментом возникновения трудности подъема, блокировки подъема и максимального горизонтального тягового усилия, как показано на рис. 11.. Таким образом, мы делаем вывод, что неразумная конструкция существующего заднего подъемного механизма является основной причиной проблем.
-
Скачать : Скачать изображение в высоком разрешении (141 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 11 . Горизонтальное тяговое усилие, действующее на переднюю стойку, в зависимости от удлинения гидравлического цилиндра.
3 . Оптимизация конструкции подъемного механизма и его динамический анализ
3.1 . Оптимизация конструкции оригинального подъемного механизма
При оптимизации конструкции подъемного механизма следует учитывать некоторые ограничивающие условия, например, расстояние по вертикали между верхней платформой и нижней рамой транспортного средства должно быть не менее 2,1 м, а существующая гидравлическая система, установленная на транспортном средстве, должна продолжать работать. использовал. Принимая во внимание ограничивающие условия и ссылаясь на подъемный механизм Маллели самосвала ( Li and Liang, 1992 ), мы предлагаем в этой статье комбинированный подъемный механизм с задним толкателем для замены существующего заднего подъемного механизма, как показано на рис. 12 .. Для оптимизированного подъемного механизма угол передачи постепенно увеличивается в процессе подъема, так что он имеет хорошие подъемные характеристики. Для автовоза принят оптимизированный подъемный механизм, требуемая тяга гидроцилиндра должна быть не более 120 кН, а горизонтальное усилие, прикладываемое к передней стойке, должно быть не более 20 кН.
-
Скачать : Скачать изображение в высоком разрешении (101 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 12 . Задний толкатель комбинированный подъемный механизм.
3.2 . Динамический анализ оптимизированного подъемного механизма
Динамический анализ оптимизированного подъемного механизма проводится по той же методике, что и в разделе 2 . На рис. 13 видно, что потребная тяга гидроцилиндра монотонно уменьшается с удлинением гидроцилиндра, максимальное значение составляет 114,5 кН, что уменьшается на 9,1 % по сравнению с таковой до оптимизации. Аналогично, на рис. 14 показано, что горизонтальное тяговое усилие, действующее на переднюю стойку, монотонно уменьшается с удлинением гидроцилиндра, максимальное значение составляет 15,0 кН, что уменьшается на 72,6 % по сравнению с таковым до оптимизации.
-
Скачать : Скачать изображение в высоком разрешении (59 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 13 . Сравнение требуемой тяги гидроцилиндра оригинального подъемного механизма и оптимизированного подъемного механизма.
-
Скачать : Скачать изображение в высоком разрешении (58 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 14 . Сравнение горизонтального тягового усилия оригинального подъемного механизма и оптимизированного подъемного механизма.
Динамический анализ подъемного механизма является лишь схематичным расчетом, необходимо провести подробный МКЭ для всей рамы транспортного средства.
4 . Анализ методом конечных элементов всей рамы автомобиля
Чтобы получить более надежные рабочие параметры и более точное распределение прочности и деформации основных компонентов, был выполнен МКЭ всей рамы автомобиля.
4.1 . Создание конечно-элементной модели
В соответствии с геометрическими характеристиками и условиями нагрузки каждого компонента для моделирования выбираются соответствующие элементы. Боковые балки с обеих сторон верхней платформы, плиты передней колонны
, большой рычаг и малый рычаг подъемного механизма представляют собой конструкции из тонких пластин, поэтому для их моделирования используются элементы SHELL181. Элементы BEAM188 используются для имитации поперечных балок, продольных балок и штифтового вала. Гидравлический цилиндр и цепь моделируются элементами LINK180. Шарнирные соединения, расположенные в таких местах, как большая рука-шарнирная опора, малая рука-верхняя платформа, гидроцилиндр-шарнирная опора и большая рука-малая рука-гидроцилиндр, моделируются с использованием элементов MPC184 (Ma et al . ., 2020), где генерируются общие узлы, которые используются для создания шарнирных соединений. В целях сохранения целостности рамы транспортного средства в целом некоторые детали, которые не оказывают очевидного влияния на общее распределение напряжений, такие как небольшие закругленные углы, фаски и ненагруженные небольшие круглые отверстия, удаляются при упрощении рамы транспортного средства. На рис. 15 представлена конечно-элементная модель подъемного механизма .
-
Скачать : Скачать изображение в высоком разрешении (296 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 15 . Конечно-элементная модель подъемного механизма.
Передняя колонна соединена с верхней площадкой через штифтовой вал, включающий в себя встроенный гидроцилиндр, подвижную звездочку, две неподвижные звездочки, цепь, гидроцилиндр-ползун, верхнюю платформу-ползун, как показано на рис. 16 . Согласно эквивалентному принципу величины и направления сил система звездочек и цепей внутри передней колонны моделируется структурой «эквивалентного треугольника» ( Lu et al., 1998 ; Wang and Zhou, 2005 ). На рис. 17 показана простая система звездочки и цепи, если не учитывать потери эффективности, силаС1прикладываемая к намотке цепи, равна силеС2применяется для намотки цепи. В то же время перемещение твердого телаС1в равной степени передаетсяС2. Точки a и b — это две точки касания, из которых цепь наматывается на звездочку и выходит из нее. Соедините точки a и центральную точку O звездочки, чтобы создать первый шарнирный элемент LINK180, соедините точки b и O , чтобы создать второй шарнирный элемент LINK180, и соедините точки a и b.для создания третьего шарнирного элемента LINK180, образуя таким образом структуру так называемого «эквивалентного треугольника». Очевидно, что конструкция «эквивалентный треугольник» может обеспечить передаточные отношения силы и перемещения в системе «звездочка-цепь» при условии линейных малых перемещений. Эквивалентные конечно-элементные модели системы звездочки и цепи, в которых отключено отображение форм элементов на основе реальных постоянных описаний ( рис. 18 а) и включено отображение форм элементов на основе реальных постоянных описаний ( рис. 18 б) получаются.
-
Скачать : Скачать изображение в высоком разрешении (117 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 16 . Структурная схема передней колонны.
-
Скачать : Скачать изображение в высоком разрешении (27 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 17 . Структура «эквивалентный треугольник».
-
Скачать : Скачать изображение в высоком разрешении (29 КБ) -
Скачать : Скачать полноразмерное изображение
Рисунок 18 . Эквивалентные конечно-элементные модели системы звездочки и цепи: (a) отображение форм элементов на основе реальных постоянных описаний отключено, (b) отображение форм элементов на основе реальных постоянных описаний включено.
Соединения между верхней платформой-ползунком и передней плитой стойки, а также между гидроцилиндром-ползунком и передней плитой стойки реализованы посредством контактного алгоритма (Httori and Serpa, 2015 ; Korayem et al., 2021 ; Tian et al. , 2021 ; Сан и др., 2005 ). Чтобы уменьшить статическую неопределенность системы звездочки и цепи, вызванную движением твердого тела, в структуре «эквивалентного треугольника» устанавливается жесткая область, ограничивающая систему звездочки и цепи.
Боковые балки верхней платформы, плиты передней колонны, большой и малый рычаги изготовлены из высокопрочной стали Т700Л, модуль упругости которой составляет 210 ГПа, предел текучести не менее 700 МПа, предел прочности при растяжении не менее более 800 МПа, а коэффициент Пуассона равен 0,307 ( Duarte et al., 2021 ; Šmak et al., 2021 ). В качестве материала других компонентов используется Q345B, модуль упругости которого составляет 206 ГПа, предел текучести не менее 340 МПа, предел прочности при растяжении находится в диапазоне от 490 МПа до 620 МПа, а коэффициент Пуассона составляет 0,28 (Вен, 2010 ) .
4.2 . Трактовки граничных условий и приложенных нагрузок
Узлы в нижней части переднего столбца накладываются на все ограничения. Чтобы смоделировать шарнирные соединения между гидроцилиндром и шарнирной опорой, а также между большим плечом и шарнирной опорой, мы освобождаем вращательную степень свободы вокруг оси штифта и ограничиваем все поступательные степени свободы и другие вращательные степени свобода. Вес трех вагонов, загруженных на верхнюю платформу, составляет 80 кН, приложенных к местам контакта между шинами и верхней платформой в виде сосредоточенной силы. После завершения моделирования верхней платформы ее вес должен составлять 40 кН, если масса верхней платформы не 4000 кг, ее можно скорректировать методом компенсации массы (Botero et al., 2017) .). Учитывая тот факт, что вес загруженных вагонов и верхней платформы фиксирован, в конечно-элементной модели не учитываются нагрузки, зависящие от времени.