Файл: Лабораторная работа 2 Динамические системы и методы их математического.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.01.2024
Просмотров: 57
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Лабораторная работа 2
Динамические системы и методы их математического
моделирования в пакете Matlab Simulink
Цель работы: Разработка аналитических моделей для определения поведения динамических систем, описываемых обыкновенными дифференциальными уравнениями n-го порядка с постоянными коэффициентами, реализация этих моделей с помощью пакета Simulink.
Задание.
Сформировать и визуализировать сигналы заданной формы (см. табл.3.1).
Порядок выполнения работы
-
Ознакомиться с пакетом прикладных программ MATLAB-Simulink. -
В соответствии с вариантом задания (см. табл.3.1) построить схему моделирования формы входного сигнала. -
Продолжительность интервала наблюдения сигнала выбрать самостоятельно.
Отчет должен содержать:
- исходные данные для моделирования;
- Simulink - модель;
- график сигнала.
Таблица 3.1
-
Вариант
Форма сигнала
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
Задание.
Модель динамической системы описывается дифференциальным уравнением
Порядок выполнения работы
-
В соответствии с вариантом задания (см. табл.3.2) построить схему моделирования линейной системы, используя уравнение (3.1). -
Осуществить моделирование системы при входном воздействии x(t) = 1(t). Начальные условия нулевые. -
На монитор выводить графики временных характеристик: переходную h(t) и весовую w(t) характеристики. Продолжительности интервалов наблюдения выбрать самостоятельно.
Отчет должен содержать:
- исходные данные для моделирования;
- Simulink - модель;
- графики h(t) и w(t).
Таблица 3.2
Варианты параметров модели
| Вариант | | | | |
| 1 | 9 | 6 | 3 | 2,3 |
| 2 | 5 | 4 | 3 | 2 |
| 3 | 8 | 6 | 2 | 3 |
| 4 | 5 | 4 | 2 | 1,5 |
| 5 | 7 | 5 | 6 | 4 |
| 6 | 10 | 6 | 5 | 2,5 |
| 7 | 6 | 2 | 4 | 1,5 |
| 8 | 7 | 6 | 6 | 3 |
| 9 | 15 | 6 | 4 | 2,8 |
| 10 | 8 | 4 | 4 | 3,6 |
| 11 | 12 | 10 | 6 | 1,8 |
| 12 | 14 | 8 | 9 | 2,4 |
| 13 | 9 | 7 | 3 | 3,6 |
| 14 | 5 | 3 | 3 | 1,6 |
| 15 | 10 | 8 | 6 | 2 |
| 16 | 8 | 4 | 2 | 3,1 |
| 17 | 17 | 10 | 9 | 2,2 |
| 18 | 12 | 6 | 4 | 1,7 |
| 19 | 6 | 3 | 4 | 2,3 |
| 20 | 16 | 4 | 8 | 3,3 |
| 21 | 13 | 5 | 7 | 4,1 |
| 22 | 8 | 3 | 4 | 1,8 |
| 23 | 5 | 3 | 4 | 2,4 |
| 24 | 18 | 12 | 13 | 3,3 |
| 25 | 15 | 7 | 10 | 2,7 |
Отчет должен содержать:
- исходные данные для моделирования;
- Simulink - модель;
- графики переходной и весовой функции.
Задание.
Передаточная функция колебательного звена 2 порядка описывается уравнением
а) Построить в Simulink модель для исследования колебательного звена с заданными параметрами
б) Исследовать влияние заданного параметра (k, T или
Отчет должен содержать:
- исходные данные для моделирования;
- Simulink - модель;
- фазовый портрет.
Таблица 3.3
| Вариант | k | T | | Варьировать |
| 1 | 10 | 0,2 | 0,1 | |
| 2 | 5 | 0,1 | 0,2 | k |
| 3 | 3 | 0,3 | 0,1 | T |
| 4 | 4 | 0,1 | 0,3 | T |
| 5 | 5 | 0,2 | 0,4 | k |
| 6 | 6 | 0,4 | 0,8 | |
| 7 | 7 | 0,5 | 1,3 | k |
| 8 | 8 | 0,1 | 1 | |
| 9 | 2 | 0,2 | 0,9 | T |
| 10 | 5 | 0,3 | 0,5 | k |
| 11 | 10 | 0,4 | 0,6 | T |
| 12 | 5 | 0,5 | 0,7 | |
| 13 | 3 | 0,5 | 1,2 | |
| 14 | 4 | 0,4 | 0,5 | T |
| 15 | 5 | 0,3 | 0,6 | k |
| 16 | 6 | 0,2 | 1,1 | |
| 17 | 7 | 0,1 | 1,3 | k |
| 18 | 8 | 0,2 | 0,9 | T |
| 19 | 2 | 0,3 | 0,2 | T |
| 20 | 5 | 0,4 | 0,5 | |
| 21 | 10 | 0,3 | 0,4 | |
| 22 | 5 | 0,6 | 0,1 | T |
| 23 | 4 | 0,2 | 0,3 | k |
| 24 | 3 | 0,4 | 0,2 | T |
| 25 | 2 | 0,4 | 0,5 | |
Задание.
В соответствии с вариантом задания определить реакцию динамической системы, описываемой дифференциальным уравнением (таб. 3.2) при внешнем воздействии заданном в таб.3.1.
Отчет должен содержать:
- исходные данные для моделирования;
- Simulink - модель;
- графики ЛАЧХ и ЛФЧХ.
3.2. Примеры выполнения лабораторных работ
При структурном моделировании в пакете Simulink необходимо составить схему моделирования. На ней изображаются блоки (усилители, сумматоры, интеграторы и т.д.) и связи между ними. При проведении моделирования эта схема набирается на экране дисплея с помощью мыши или клавиатуры. По своему смыслу этот процесс аналогичен вводу программы, однако он более прост и нагляден. Подробная информация о реализации таких схем в Simulink имеется в разделе 3.3.
Пример 1. Моделирование входных сигналов динамических систем
Постановка задачи.
Построить модель сигнала вида
на интервале [0; 2] и отобразить его на виртуальном осциллографе.
Решение.
Структурная схема моделирования сигнала приведена на рис.3.1.
Сигнал
Для сигнала
Результаты работы выведены на экран осциллографа Skope(библиотека Sinks).
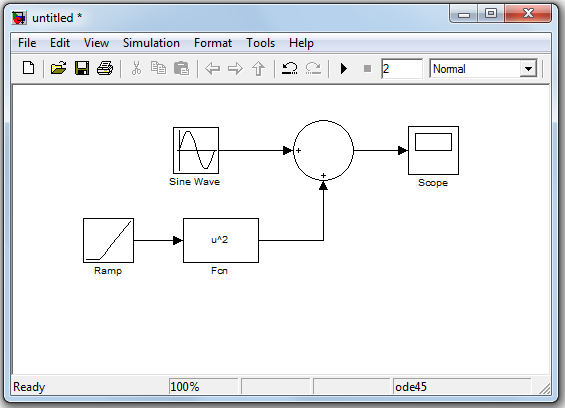
Рис.3.1. Схема моделирования сигнала
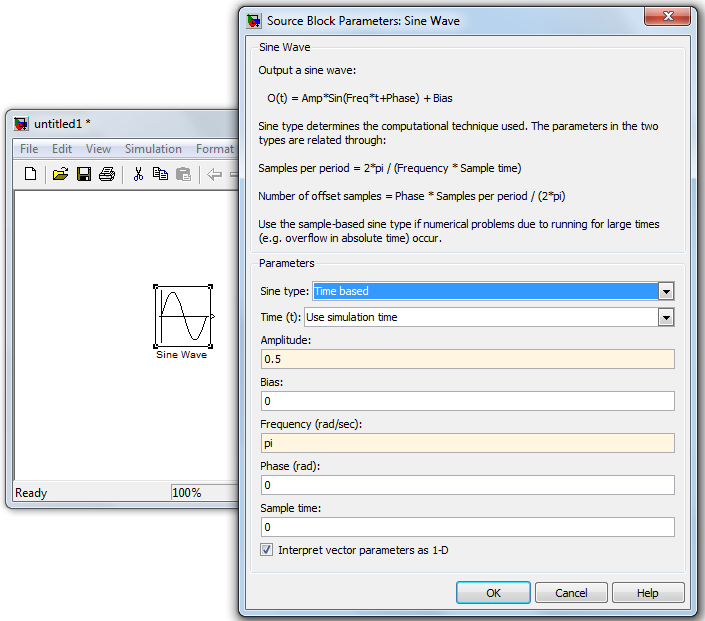
Рис.3.2. Параметры блока SineWave
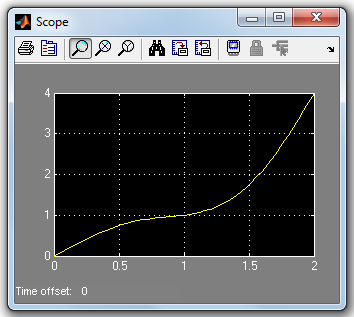
Рис.3.3. Сигнал на экране виртуального осциллографа