ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 277
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Электрические потери в обмотках цепи якоря и в щеточном контакте машины постоянного тока называют переменными, так как их величина зависит от нагрузки машины и обусловлена нагревом обмоток и щеточного контакта.
Потери в цепи якоря определяются по формуле:
 (6.6)
(6.6)где
 - сопротивление цепи якоря, приведенное к расчетной рабочей температуре.
- сопротивление цепи якоря, приведенное к расчетной рабочей температуре. , (6.7)
, (6.7)где r/ — активное сопротивление при температуре Т1;
Т2– рабочая температура двигателя;
α = 0,004 – температурный коэффициент меди.
Электрические потери в контакте щеток:
 (6.8)
(6.8)где
 — переходное падение напряжения на щетках, принимаемое в соответствии с маркой щеток.
— переходное падение напряжения на щетках, принимаемое в соответствии с маркой щеток.6.4. Коэффициент полезного действия
В машинах постоянного тока имеется ряд трудно учитываемых потерь — добавочных. Поэтому, согласно ГОСТ, для двигателей без компенсационной обмотки значение добавочных потерь Рд принимают равным 1% от подводимой мощности. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным 0,5%.
Мощность (Вт) для двигателя постоянного тока (электрическая мощность или подводимая мощность):
 (6.9)
(6.9)Коэффициент полезного действия электрической машины представляет собой отношение мощностей отдаваемой (полезной) к подводимой (потребляемой):
 (6.10)
(6.10)Обычно КПД машин постоянного тока составляет 0,75—0,9 для машин мощностью от 1 до 100кВт и 0,9—0,97 для машин мощностью свыше 100кВт. У машин постоянного тока малой мощности КПД намного меньше.
Коэффициент полезного действия электрической машины можно определять:
а) методом непосредственной нагрузки по результатам измерений подведенной P1 и отдаваемой P2 мощностей;
б) косвенным методом по результатам измерений потерь.
Метод непосредственной нагрузки применим только для машин малой мощности, для остальных случаев применяется косвенный метод, как более точный и удобный.
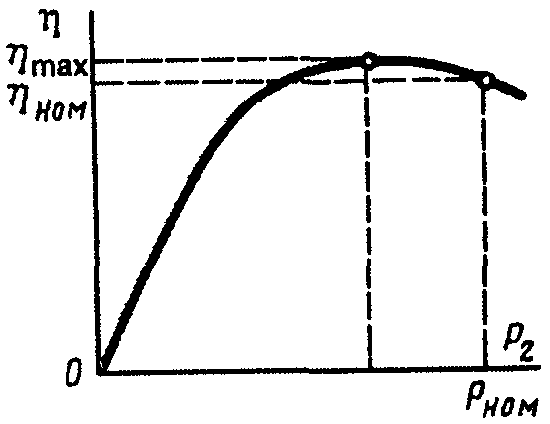
Рисунок 6.2 – Зависимость η=f(Р2)
Существует несколько косвенных способов определения КПД. Наиболее прост способ холостого хода двигателя, когда потребляемая машиной постоянного тока мощность затрачивается только на потери холостого хода. Что же касается электрических потерь, то их определяют расчетным путем после предварительного измерения электрических сопротивлений обмоток и приведения их к рабочей температуре.
6.5. Принцип действия двигателя постоянного тока
Электрические машины обладают свойством обратимости, т. е. они могут работать как в режиме генератора, так и в режиме двигателя. Поэтому если машину постоянного тока подключить к источнику энергии постоянного тока, то в обмотке возбуждения и в обмотке якоря машины появятся токи. Взаимодействие тока якоря с полем возбуждения создает на якоре вращающий электромагнитный момент Мэм.
 (6.11)
(6.11)где ω – угловая частота вращения якоря (рад/с).
Под действием электромагнитного момента якорь машины начнет вращаться, т. е. машина будет работать в режиме двигателя.
В процессе работы двигателя его якорь вращается в магнитном поле. В обмотке якоря индуцируется ЭДС Еа , направление которой определяют по правилу «правой руки». В двигателе ЭДС направлена против тока Ia , и поэтому ее называют противо-ЭДС якоря.
Для двигателя, работающего с постоянной частотой вращения, подведенное к двигателю напряжение уравновешивается противо-ЭДС обмотки якоря и падением напряжения в цепи якоря:
 (6.12)
(6.12)На основании (6.12) ток якоря определяется по формуле:
 (6.13)
(6.13)Умножив обе части уравнения (6.12) на ток якоря Ia, получим уравнение мощности для цепи якоря:
 (6.14)
(6.14)где
 — электрическая мощность, подводимая к якорю;
— электрическая мощность, подводимая к якорю;
 — мощность электрических потерь в цепи якоря.
— мощность электрических потерь в цепи якоря. - электромагнитная мощность, представляющая собой полную электрическую мощность, которая преобразуется в полезную механическую мощность и расходуется на покрытие магнитных (потери в стали якоря), механических и добавочных потерь.
- электромагнитная мощность, представляющая собой полную электрическую мощность, которая преобразуется в полезную механическую мощность и расходуется на покрытие магнитных (потери в стали якоря), механических и добавочных потерь.6.6. Пуск двигателя
Ток якоря двигателя определяется формулой (6.13). Если принять U и
 неизменными, то ток Iа зависит от противо-ЭДС Еа.
неизменными, то ток Iа зависит от противо-ЭДС Еа. В начальный момент пуска якорь двигателя неподвижен (n=0) и в его обмотке не индуцируется ЭДС (Еа=0). Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток:
 (12.15)
(12.15)Обычно сопротивление ra невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10—20 раз превышающих номинальный ток двигателя.
Такой большой пусковой ток весьма опасен для двигателя. Во-первых, он может вызвать в машине круговой огонь, а во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить. Этот ток вызывает резкое падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включенных в эту сеть.
Поэтому пуск двигателя непосредственным подключением в сеть обычно применяют для двигателей мощностью не более 1,0 кВт. В этих двигателях благодаря повышенному сопротивлению обмотки якоря и небольшим вращающимся массам значение пускового тока лишь в 3—5 раз превышает номинальный, что не представляет опасности для двигателя. Что же касается двигателей большей мощности, то при их пуске для ограничения пускового тока используют пусковые реостаты, включаемые последовательно в цепь якоря (реостатный пуск).
По мере разгона якоря двигателя ступени пускового реостата R плавно выводятся, и пуск двигателя заканчивается. Сопротивление пускового реостата R выбирают обычно таким, чтобы пусковой ток не превышал номинальный более чем в 2—3 раза.
Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызывает значительные потери энергии. Кроме того, пусковые реостаты обладают большими массогабаритными показателями. Поэтому в двигателях большой мощности применяют пуск двигателя путем понижения напряжения.
6.7 Характеристики двигателей постоянного тока параллельного и независимого возбуждения
Основными характеристиками, по которым оцениваются рабочие свойства двигателя, являются:
1) скоростная характеристика (электромеханическая)n=f(Ia) — зависимость скорости вращения якоря от тока якоря;
2) моментная характеристика Mэм=f(Ia) — зависимость электромагнитного момента от тока якоря;
3) механическая характеристика n=f(Mэм) — зависимость скорости вращения якоря от электромагнитного момента.
При снятии характеристик нагрузочный момент изменяют от нуля до 1,1—1,2Мном.
Номинальный момент Мном, Н·м, определяют по формуле:
 , Н·м; (6.16)
, Н·м; (6.16)где
 - номинальная угловая частота вращения якоря определяется по формуле:
- номинальная угловая частота вращения якоря определяется по формуле: , рад/сек. (6.17)
, рад/сек. (6.17)ЭДС двигателя определяется по формуле:
 (6.18)
(6.18)Тогда скорость вращения якоря двигателя (об/мин):
 (6.19)
(6.19)Подставив значение Еа из (6.12), получим выражение скоростной характеристики:
 (6.20)
(6.20)т. е. скорость вращения якоря двигателя прямо пропорциональна напряжению и обратно пропорциональна магнитному потоку возбуждения.
Если к валу машины не будет приложен нагрузочный момент (М2=0), то двигатель будет работать на холостом ходу, при этом ток в якоре Ia=I0, а скорость n=n0. Ток I0 — ток холостого хода — создает электромагнитный момент Мо, необходимый для преодоления существующего в самом двигателе тормозного момента, обусловленного силами трения и магнитными потерями. Этот ток относительно мал и составляет 2—5% от номинального.
Работа двигателя при М=0 и Iа=0 называется идеальным холостым ходом. Согласно (6.20) скорость при идеальном холостом ходе равна:

, об/мин (6.21)
Изменение скорости вращения двигателя при переходе от номинальной нагрузки к холостому ходу, выраженное в процентах, называют номинальным изменением скорости вращения якоря:
 ,% (6.22)
,% (6.22)В двигателях параллельного и независимого возбуждения изменение скорости при переходе от холостого хода к номинальной нагрузке мало и составляет 2—5%. Такие слабо падающие скоростные и механические характеристики называются жесткими.
Скоростную характеристику двигателя n=f(Ia) снимают при Iв=Iвном=const и U=Uном=const. Номинальный ток возбуждения Iвном устанавливают так, чтобы обеспечить номинальную скорость nном при Iа=Iаном и номинальном подведенном напряжении Uном .
Скоростные характеристики показаны на рисунке6.3. Их анализ проведем, исходя из уравнения (6.20).
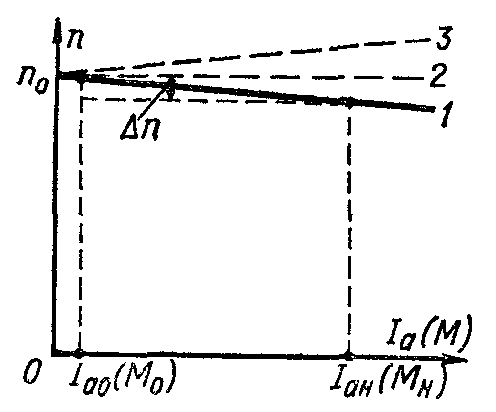
Рисунок 6.3 - Скоростные характеристики двигателя постоянного тока параллельного и независимого возбуждения
При U=Uном=const на скорость якоря будут оказывать влияние два фактора: падение напряжения в цепи якоря и размагничивающее действие реакции якоря, уменьшающее поток. Поток двигателя при нагрузке
 (6.23)
(6.23)где Ф0 — поток, созданный током возбуждения;
 — уменьшение потока из-за размагничивающего действия поперечной реакции якоря.
— уменьшение потока из-за размагничивающего действия поперечной реакции якоря.Тогда при возрастании тока якоря падение напряжения
 будет стремиться уменьшить скорость, а — увеличить.
будет стремиться уменьшить скорость, а — увеличить.Вид скоростной характеристики зависит от того, какой из этих факторов будет действовать сильнее. При более сильном влиянии падения напряжения характеристика имеет падающий характер (сплошная линия на рисунке 6.3), а если будет преобладать действие реакции якоря, то она может иметь возрастающий характер (штриховые линии).
Нормальная работа двигателя возможна только при падающей характеристике.