Файл: Пояснительная записка Предмет Теоретическая и прикладная механика Тема курсовой работы Кинематическое исследование механизмов Автор работы Наурзалиев Ерлан Бержанович.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 68
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА РЕСПУБЛИКИ КАЗАХСТАН
МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА РЕСПУБЛИКИ КАЗАХСТАНЗападно-Казахстанский аграрно-технический университет имени Жангир хана
Центр «Общетехнической подготовки»
Пояснительная записка
Предмет «Теоретическая и прикладная механика»
Тема курсовой работы «Кинематическое исследование механизмов»
Автор работы: Наурзалиев Ерлан Бержанович
(подпись) (Ф.И.О.)
Специальность: 6В07202 – Нефтегазовое дело
Группа: НГД-12(2ж)
Руководитель работы Сарбалина Б.Ж.
(подпись) (Ф.И.О.)
Курсовая работа защищена « » 2022г.
Оценка: ____________________________________
(письменно)
Члены комиссии: Джаналиев Е.М.
(подпись) (Ф.И.О)
Дусенов М.К.
(подпись) (Ф.И.О)
Уральск 2022
СОДЕРЖАНИЕ:
Введение…………………………………………………………………………………………………..3
-
Раздел 1 «Кинематическое исследование простого кривошипно-шатунного механизма»……………….4-
Построение плана механизма…………………………………………………………………………...4 -
Построение диаграммы перемещения ползуна……………………………………………………..…5 -
Построение плана механизма при φ= 450 ……………………………………………...………………6 -
Построение планов скоростей ……………………………………………………………………….…7 -
Построение планов ускорений …………………………………………………………………………9
-
-
Раздел 2 «Кинематическое исследование сложного кривошипно-шатунного механизма……………12
2.1. Построение плана механизма …………………………………………………………………………12
2.2. Построение диаграммы перемещения штока ………………………………………………………..14
2.3. Построение плана механизма при φ= 450 ……………………………………………………………..14
2.4. Построение планов скоростей ……………………………………………………………..………….15
2.5. Построение планов ускорений ………………………………………………………………………...16
Заключение.................................................................................................................................17
Список использованной литературы.......................................................................................18
ВВЕДЕНИЕ
Курсовая работа на тему: «Кинематическое исследование механизмов» состоит из двух разделов - Кинематическое исследование простого кривошипно-шатунного механизма и Кинематическое исследование сложного кривошипно-шатунного механизма.
Во всех разделах используются масштабные коэффициенты физических величин, которые для краткости называются масштабами физических величин:
Линейный масштаб

 ,
,
 ;
;Масштаб перемещения
 , м/мм;
, м/мм;Масштаб скорости
 ,
,  ;
;Масштаб ускорения

 ,
, 
Масштаб силы

 , Н/мм.
, Н/мм.Масштаб угла µφ ,

Масштаб времени

 , с/мм;
, с/мм;В данной работе используется чертеж Кривошипно-шатунного механизма в выбранном масштабе с соблюдением условных обозначений звеньев и кинематических пар.
Раздел 1
«Кинематическое исследование простого кривошипно-шатунного механизма»
-
Построение плана механизма
Для построения плана механизма мною выбран масштаб μℓ.
С учетом размеров звеньев механизма выбираю масштаб длины μℓ= 0,01 м/мм.
Перевожу все действительные размеры в масштабные по формуле:
 =
=

 ,
,где: О – масштабная величина, мм;
Д – действительная величина, м;
 - масштаб длины, м/мм.
- масштаб длины, м/мм. и т. д.
и т. д.
[АВ]=
Все полученные величины заношу в таблицу 1.
Таблица 1
| Действительная величина,м | |
 | 0,3 |
 | 0,85 |
| е | 0,09 |
| φ | 450 |
| ω1 | 22с-1 |
По приведенным данным таблицы 1 построим план механизма.
Выбираем произвольную т.О - начало координатных осей. Проводим горизонтальную ось ОХ и вертикальную ось ОУ. Радиусом ОА = 30 мм с
центром в т.О проводим окружность. Окружность является траекторией движения т. А при вращении.
С помощью циркуля окружность разделим на 12 равных частей и каждое деление отмечаем буквами АО, А1, А2, А3, . . . . .А11, А12 (АО);
От оси ОХ вверх на расстоянии 9 мм проводим дополнительную ось Z-Z
Затем методом засечек выбирая точку А за центр отрезок АВ=90мм (с помощью циркуля) откладываем на оси Z-Z и определяем 12 положений точки В: ВО, В1, В2, В3 . . . . . . .В11, В12 (В0). (см. Рис.1)
Чтобы найти положение точки С ,нужно отрезок ВА продлить и на ней отложить отрезок [AC]=10мм .Аналогично для остальных положений находим таким же методом. Полученные точки С0, С1, С2, С3, С4, С5, С6, С7, С8, С9, С10
, С11, С12 плавно соединяем и получаем вертикальный эллипс ,т.е. траекторию точки С. Также на отрезке АВ от точки В в сторону А откладываем отрезок ВS=40мм.
Аналогично для остальных положений находим положение точки S. Полученные точки S0, S1, S2, S3, S4, S5, S6, S7, S8, S9, S10, S11, S12 плавно соединяем и получаем горизонтальный эллипс ,т.е. траекторию точки S . На оси Z-Z измеряем расстояние В0- В6. (Чертеж1)
В0- В6 = Н- ход ползуна, В0 –правая крайняя точка ползуна , а В6- левая крайняя точка ползуна . В0- принимаем за начало отсчета. Из (Рис.1) измеряем расстояния,тогда
В0В1=4мм В0В4=53мм В0В7=57мм В0В10=18мм
В0В2=22мм В0В5=60мм В0В8=47мм В0В11=5мм
В0В3=39мм В0В6=62мм В0В9=34мм В0В12=0мм
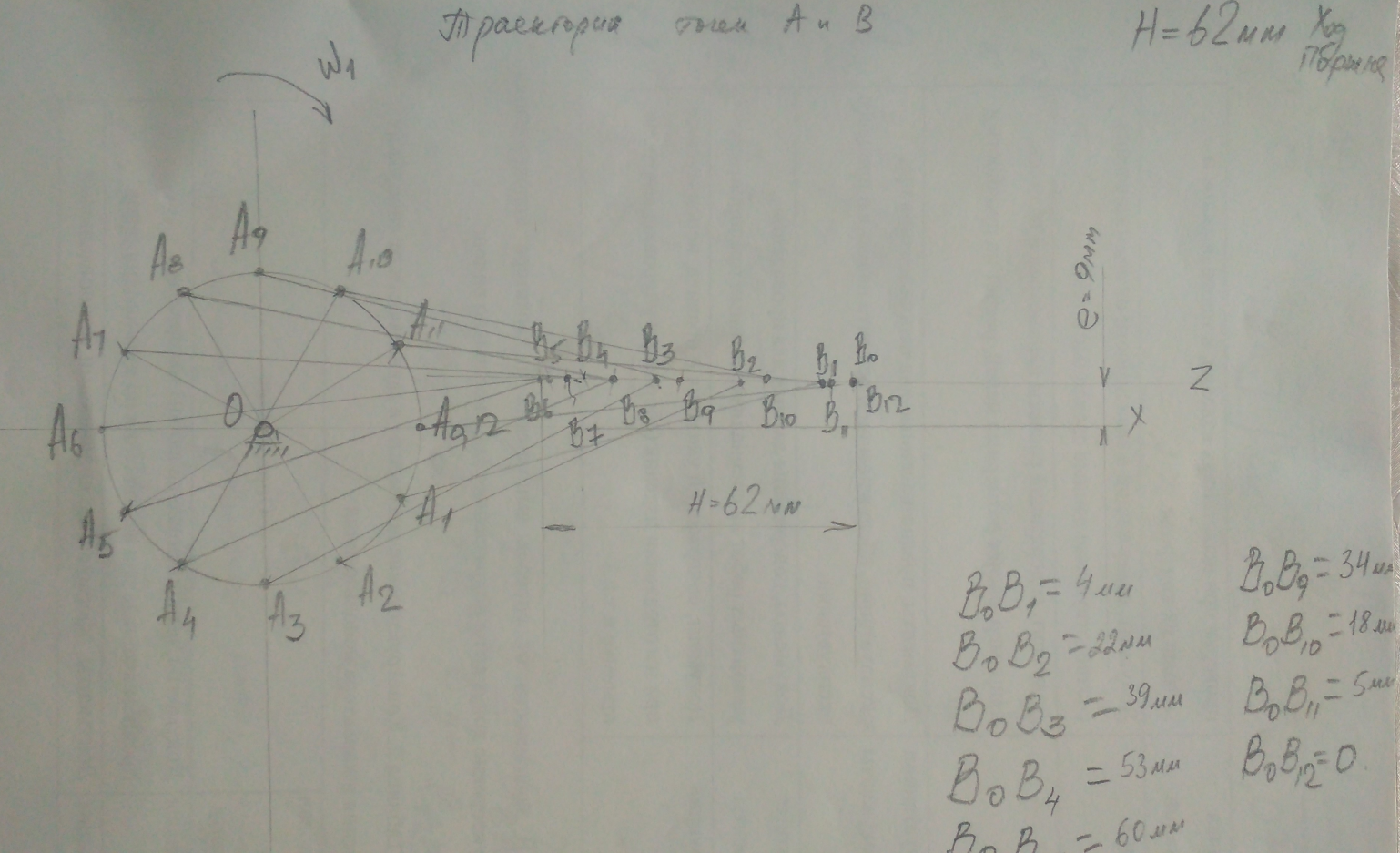
Рис.1 – Траектория точек А и В
-
Построение диаграммы перемещения ползуна
При одном полном обороте перемещение ползуна изменяется. И это изменение я должен показать на диаграмме (см. Рис.2). Чтобы построить диаграмму мне нужно определить масштаб угла

Построим прямоугольную систему координат ХОУ(φОН). φ- угол поворота кривошипа; Н-ход ползуна; т.О- начало координат.
По горизонтальной оси откладываем отрезок L=120 мм, условно изображающий 360о, т.е. один полный оборот кривошипа.
Отрезок L разделим на 12 равных частей и тогда каждое деление условно изображает 30о угла поворота кривошипа.
По вертикальной оси откладываем величины: В0В1...В0В12. Полученные точки соединяем плавной кривой.
Таким образом получим диаграмму перемещения ползуна в зависимости от угла поворота кривошипа . Это кривая математически выражается Н=f(φ).

Рис.2 – Диаграмма перемещения ползуна
-
Построение плана механизма при φ= 450
Строем план механизма для заданного угла φ= 450 (см.Рис.3).
План механизма масштаб остается тот же, что и для чертежа1.
Угол поворота кривошипа φ= 450 строю с помощью угольника с углами 900, 450, 450 или с помощью циркуля (без применения транспортира).
VА = ω1
 = 22 с-1 0,3 м =6.6 м/с
= 22 с-1 0,3 м =6.6 м/сВыбираем масштаб плана скоростей. Принимаем
 = 75 мм.
= 75 мм.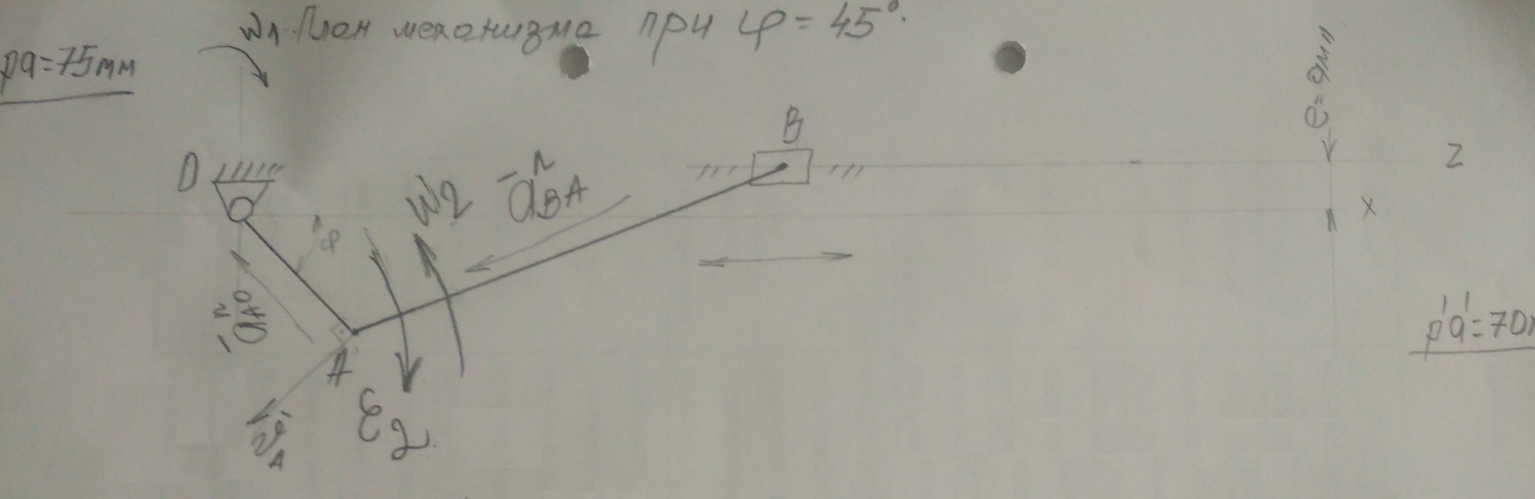
Рис.3 – План механизма
-
Построение планов скоростей
Строим план скоростей при φ = 750, угловая скорость кривошипа ω1=22 с-1
VО =0, т.к. неподвижная опора
Линейная скорость т.А, VА = ω1
= 22 с-1 0,3 м =6.6 м/сВыбираем масштаб плана скоростей. Принимаем
= 75 мм; тогда : 
 0,088
0,088 
 Выбираем произвольную точку р – полюс плана скоростей. От точки p проводим линию перпендикулярную к ОА вниз в сторону направления скорости
Выбираем произвольную точку р – полюс плана скоростей. От точки p проводим линию перпендикулярную к ОА вниз в сторону направления скорости  и на ней отложим вектор = 75 мм. (см.Рис.4).
и на ней отложим вектор = 75 мм. (см.Рис.4).Для определения скорости т.В составляем векторное уравнение
(по принципу неизвестную величину выражать через известную величину)
Вектор скорости точки А известен дважды и по направлению и по величине, поэтому вектор скорости VА подчеркиваем дважды .
Вектор относительной скорости VВА известен только по направлению - направлен перпендикулярно к АВ, так как т.В относительно т.А совершает вращательное движение. Поэтому VВА подчеркиваем только один раз. Через т. а проводим линию, перпендикулярную к АВ, а от точки Р (полюс) параллельную // к оси Z-Z .На пересечении двух линий находим искомую точку b. . Получим Δ pab - это и есть план скоростей для φ = 30