Файл: Курсовая работа по дисциплине Теория автоматического управления Расчет судовой системы автоматического регулирования.docx
Добавлен: 10.01.2024
Просмотров: 53
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство транспорта РФ
Федеральное агентство морского и речного транспорта
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Государственный университет морского и речного флота
имени адмирала С.О. Макарова»
Курсовая работа
по дисциплине
Теория автоматического управления
Расчет судовой системы автоматического регулирования
Схема ___4___, вариант ___2___
Исправленный отчет от 04.01.2019
Выполнил: курсант 331 группы
Пикалёв К.Ю.
Проверил: преподаватель
Малышев В.А.
Санкт-Петербург
2019 г.
ЗАДАНИЕ
на курсовую работу по дисциплине "Теория автоматического управления"
курсанту 3 курса ФСЭ, группы Э-331 Капустиной В.С.
Выдано ..2019 г. Руководитель Малышев В.А.
ЗАДАНИЕ: рассчитать судовую систему автоматического регулирования.
1.АНАЛИЗ СИСТЕМЫ:
1.1. Составить краткое описание принципа действия и функциональную схему САР;
1.2. Вывести дифференциальные уравнения элементов системы и произвести их линеаризацию;
1.3. Вывести передаточные функции объекта управления по задающему и возмущающему воздействиям;
1.4. Разработать структурную схему САР;
1.5. Определить передаточные функции и характеристические уравнения контура управления и замкнутой САР;
1.6. Исходя из требования статической точности определить коэффициент передачи САР;
1.7. Рассчитать критический коэффициент передачи системы с помощью критерия устойчивости Гурвица;
1.8. Построить АФЧХ контура управления и логарифмические характеристики, определить запас устойчивости САР.
2. СИНТЕЗ СИСТЕМЫ:
2.1. Выбрать и рассчитать корректирующее устройство, исходя из задания по улучшению качества регулирования;
2.2. Рассчитать параметры типового регулятора (коэффициенты пропорциональной, интегральной и дифференциальной составляющих), которые обеспечивают стандартный вид переходного процесса:
- апериодического,
- минимум среднеквадратичной ошибки,
- оптимум по модулю.
2.3. Рассчитать и построить переходные характеристики САР по пунктам 2.1 и 2.2.
3. ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САР:
3.1. Исследовать систему на автоколебания с учётом заданной нелинейности методом гармонической линеаризации (нелинейную характеристику задает руководитель);
В пояснительной записке должны быть даны все необходимые обоснования и расчеты, объем пояснительной записки должен составлять не более 20 машинописных страниц, все схемы, а также статические, динамические характеристики выполняются на отдельных листах, в конце пояснительной записки приводится заключение о достигнутых результатах работы по сравнению с заданием.
Схема …4.. Вариант …2…
Преподаватель кафедры ЭДАС ………………………….Малышев В.А.
Задача 4 Система автоматического регулирования тока генератора.
Генератор имеет следующие параметры: Uн = 220 В, ωн = 78,5 рад/с, 2р = 4; 2а = 2.
Lя = 11мГн;Lн= 2,34мГн; Iв = 9,21 А.
Диапазон регулирования D = 1, коэффициент передачи датчика тока KДТ = 18мВ/А, коэффициент передачи сравнивающего устройства СУ Kсу = 40.
Изменение сопротивления нагрузки
 .
.| Вариант | Генератор | Тиристорный преобразователь | Фильтр | Точность регулирования | |||||||||
| Iн, А | rя, Ом | wя | rв, Ом | Iвн, А | wв | Lн, мГн | TТП, с | Тф, с | δ, % | ||||
| 2 | 410 | 0,057 | 89 | 24 | 9,21 | 750 | 2,34 | 0,008 | 0,01 | 0,5 | |||
Рис. 1. Принципиальная схема САР тока генератора
R2 – датчик тока;
СУ – сравнивающее устройство;
Анализ Системы.
1.1.Краткое описание принципа действия и функциональная схема САР.
Описание системы работы.
Объектом управления является генератор, управляемой величиной- ток якорной цепи(ток генератора).При изменении нагрузки изменяется ток генератора. Предположим, что сопротивление нагрузки увеличится, значит, ток уменьшится, а следовательно, падение напряжения на измерительном шунте R2станет меньше. Этот сигнал поступает на сравнивающее устройство СУ. Выходной сигнал СУ определяется разностью между заданным значением U0 и напряжением с датчика R2.
Ошибка, то есть выходной сигнал СУ, увеличивается. Далее стоит пропорциональный усилитель. Если на его входе сигнал возрос, то и на выходе тоже возрастет. Угол отпирания тиристоров α уменьшается, напряжение на обмотке возбуждения увеличивается, следовательно, ток возбуждения и создаваемый магнитный поток увеличатся, ЭДС генератора возрастает, что и стабилизирует ток якорной цепи.
Ф
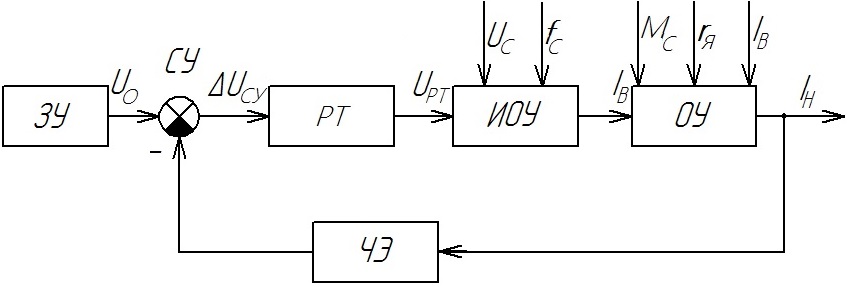
ункциональная схема САР представляется в следующем виде:
Рис.2.Функциональная схема САР
ОУ – объект управления
ЗУ – задающее устройство
ЧЭ – чувствительный элемент.
ИОУ – исполнительный орган управления.
1.2. Выведем дифференциальные уравнения элементов системы и произведем их линеаризацию.
Уравнение равновесия напряжения якорной цепи генератора:

Уравнение цепи нагрузок генератора:

Решаем данные уравнения совместно, относительно тока якоря:
Преобразовав уравнение генератора, получим:

Уравнение возбуждения цепи генератора:



Решая совместно систему:
 , где
, где (сек.) – постоянная времени обмотки возбуждения;
(сек.) – постоянная времени обмотки возбуждения; - коэффициент передачи генератора по возбуждению;
- коэффициент передачи генератора по возбуждению; ;
; , β - коэффициент пропорциональности между потоком и магнитодвижущей силой (определяем пользуясь графиком (рис.3.));
, β - коэффициент пропорциональности между потоком и магнитодвижущей силой (определяем пользуясь графиком (рис.3.)); (Вб);
(Вб); - конструктивная постоянная генератора;
- конструктивная постоянная генератора; ;
;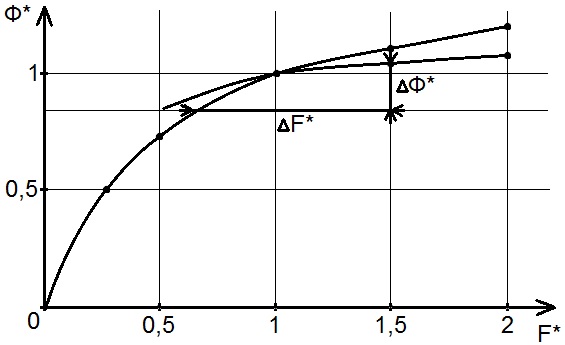
Рис.3.
 = 0,32
= 0,32 = 1,0
= 1,01.3. Передаточные функции объекта управления по задающему и возмущающему воздействиям.
Уравнения тиристорного преобразователя, работающего в режиме непрерывного тока, запишется в следующем виде:
 , где
, где -коэффициент передачи тиристорного преобразователя по управлению;
-коэффициент передачи тиристорного преобразователя по управлению;Передаточная функция ТП:
 .
.Уравнение датчика тока:
 ;
; (мВ/А);
(мВ/А);Уравнение регулятора тока:
 ;
; .
.Решая совместно выше приведённые уравнения относительно тока якоря, получаем уравнение разомкнутой САУ:
 ; (1)
; (1)Передаточная функция разомкнутой системы по управлению:



 (об/сек);
(об/сек); (Ом);
(Ом);Lя= 11 (мГн)= 0,000011 (Гн) - индуктивность якоря генератора определяется по уравнению.
Передаточная функция по возмущению:


Уравнение замкнутой системы получим, приравняв
 ,
, ; (2)
; (2) 1.4. Разработка структурной схемы САР
Структурную схему САР строим по уравнениям передаточных функций отдельных звеньев.
 - передаточная функция П-регулятора
- передаточная функция П-регулятора - передаточная функция ТП
- передаточная функция ТП - передаточная функция двигателя по управлению
- передаточная функция двигателя по управлению - передаточные функции ДПТ по возмущению
- передаточные функции ДПТ по возмущению - передаточная функция потенциометра
- передаточная функция потенциометра
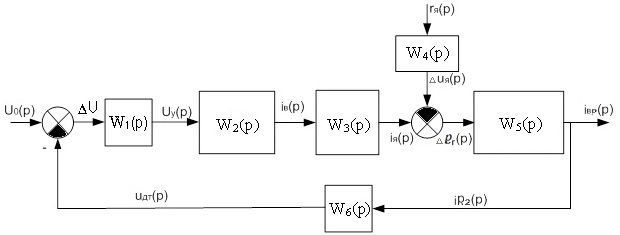
- передаточная функция тахогенератора
Рис.4. Структурная схема САР тока генератора
1.5. Определение передаточных функции и характеристические уравнения контура управления и замкнутой САР.
Передаточная функция разомкнутой САР по управлению:

Передаточная функция разомкнутой САР по возмущению:

Передаточная функция замкнутой САР по управлению:

Передаточная функция замкнутой САР по возмущению: