Файл: Хотя периодически и появляются интересные стартапы, которые пытаются переломить эту тенденцию.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 18
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Проблемой же является то, что даже в настоящее время, чтобы получить протез, человек должен отстоять долгую очередь, пройти множество инстанций, чтобы в итоге… — да, получить дорогой протез. Здесь подразумевается не просто косметический протез, а именно восполняющий функциональность потерянной конечности, — например, тяговый или бионический. Под тяговым протезом подразумевается протез, который обладает достаточно высокой надёжностью и приводится в действие движениями тела, например, сгибанием руки в локте, после чего сжимается кисть.
Такого рода протезы являются достаточно простыми и надёжными, и достаточно часто воспроизводятся в бедных странах. Подобным является следующий проект:
Однако гораздо более интересным вариантом является бионическое протезирование. Бионический протез представляет собой максимальную копию настоящей конечности. Например, если мы говорим о руке, то каждый палец приводится в действие отдельным электродвигателем.
Подобные протезы являются самым функциональным вариантом из существующих, однако, к сожалению, отличаются достаточно высокой ценой. Например, если мы говорим о России, то стоимость такого протеза может стартовать от ста тысяч и достигать полутора миллиона рублей. На западе подобного рода протезы стоят ещё дороже, и их стоимость может легко составлять порядка 30 000 долларов и выше.
Хотя периодически и появляются интересные стартапы, которые пытаются переломить эту тенденцию.
Одним из таких известных стартапов стал проект Open Bionics, создатель которого, Джоэл Габбард, ещё в институте увлёкся робототехникой и заинтересовался темой протезов рук. Эта идея его настолько захватила, что он разработал несколько прототипов, которые впоследствии распечатал на 3D принтере и собрал из подручных материалов. Они были достаточно корявыми, но позволили ему запустить свою компанию на Indigogo, благодаря чему он смог собрать донатов на 44000 фунтов стерлингов.

Картинка: openbionics.com
Всё это позволило ему основать компанию, которая со временем открыла несколько филиалов в разных городах Великобритании, и кроме того, его компания стала первой в мире, официально сотрудничающей с системой государственного медицинского страхования Великобритании.
В процессе реализации своей идеи он заметил, что некрасивые и не совсем эргономичные протезы угнетают детей, и дети не хотят иметь с ними дело. Увидев это, ему пришла идея, что необходимо сделать нечто такое, что полюбилось бы всем детям. В итоге появилась рука Hero Arm, которая оформлена в стиле супергероев, например, железного человека и не только:

Картинка: openbionics.com
Несмотря на все усилия, стоимость подобной руки всё равно остаётся достаточно высокой и составляет порядка 8000 фунтов стерлингов, если по минимуму, и до 12 500 фунтов стерлингов, если по максимуму.
Цена достаточно немаленькая, даже для западных пациентов. И здесь мы вернулись к тому, с чего мы начинали в самом начале, — что даже в России стоимость подобных изделий весьма велика для пациента. Да, конечно, в России (к счастью) есть система медицинского страхования, которая позволяет покрыть эти расходы. Однако для участия в этой программе производитель должен пройти сертификацию, и сам пациент тоже должен пройти много специалистов, в итоге которой он получает выбор достаточно ограниченного количества изделий.
Неужели всё так плохо? Не совсем. Уже некоторое время существуют проекты, которые выкладывают в открытый доступ конструкции, программное обеспечение и векторные чертежи. Любой, кто скачает исходники, сможет (при соответствующих умениях) изготовить нужный протез самостоятельно.
Одним из таких проектов является проект Openbionics.org (почти собрат предыдущего проекта, только тот «.com», а этот — «.org» — открытый европейский проект). На сайте проекта имеется некоторое количество готовых конструкций, как бионических рук:

Картинка: openbionics.org
так и тяговых конструкций, приводимых в действие мышцами тела:
Анализируя всё имеющееся в интернете, можно прийти к выводу, что конструкции в свободном доступе являются либо достаточно топорными, либо достаточно сложными и дорогими, либо «всё сразу и много».
Как правило, причиной этого являются несколько факторов:
-
Малый объём производства (как вы знаете, чем больше объём производства, тем дешевле каждое конкретное изделие); -
Потребность в труде высококвалифицированных и высокооплачиваемых специалистов из области медицины, робототехники, программирования; -
Использование методов производства, изначально предназначенных для малых партий и опытного производства.
Вот на этом последнем пункте я хотел бы остановиться более подробно.
Что же касается бионических протезов, это ярко выражается в том, что для их производства, даже серийного, используются 3D принтеры, в то время как могло бы использоваться литьё, или любые другие способы промышленного скоростного масштабного производства.
Да, понятно, что подобные методы производства не всегда доступны для рядового производителя. Кроме того, в мире известны целые фабрики, которые представляют собой множество установленных 3D принтеров, где осуществляется производство любых изделий с использованием исключительно 3D печати. Однако этот способ является хоть и интересным, но достаточно дорогостоящим в реализации, хотя бы из-за необходимости покупки большого числа 3D принтеров.
Именно здесь и видится возможность максимального удешевления и ускорения производства.
Например, выстроить логику создания бионической руки в рамках концепции максимального использования уже существующих и доступных для покупки запчастей. Например, детали частично могут быть куплены на известном китайском сайте, а частично куплены в любой сети запчастей для автомобилей.
Как ни странно, это правда. В свою бытность автору приходилось участвовать в сборке многих интересных вещей, и это дало следующее понимание: магазин автомобильных запчастей предоставляет собой практически бездонное море качественных, хорошо изготовленных деталей, и по весьма умеренной цене!
Разнообразные втулки, сочленения, соединения, болты, пары трения и т.д. и т.п. — всё это может быть куплено по доступной цене, в любых количествах и подобрано под конкретный проект. И это не обязательно детали как таковые: в качестве деталей может быть куплена цельная запчасть и разобрана. Это, что касается механической части конструкции (к сожалению, изобретатели подобный источник деталей мало используют, наверное, ввиду недостаточного знания таящихся в нём возможностей).
Что же касается самого каркаса руки, то он может быть изготовлен не с помощью использования дорогого промышленного литья под давлением, а с использованием следующего подхода: например, если мы возьмём за цель изготовить бионическую руку, то мы можем все элементы руки, — как напечатать на 3D принтере так и… вырезать с помощью лазерной резки!
Да-да, именно: ведь если подумать, 3D печать представляет собой «послойное наложение слоёв для создания объёмного объекта». Однако, кто сказал, что мы обязательно должны для создания такого объекта использовать 3D печать? Мы можем этот трёхмерный объект разрезать на плоские пластины (предварительно оптимизировав конструкцию), после чего эти плоские пластины вырезаются с использованием лазерной резки, и — свинчиваются болтами (картинка ниже — кликабельна).
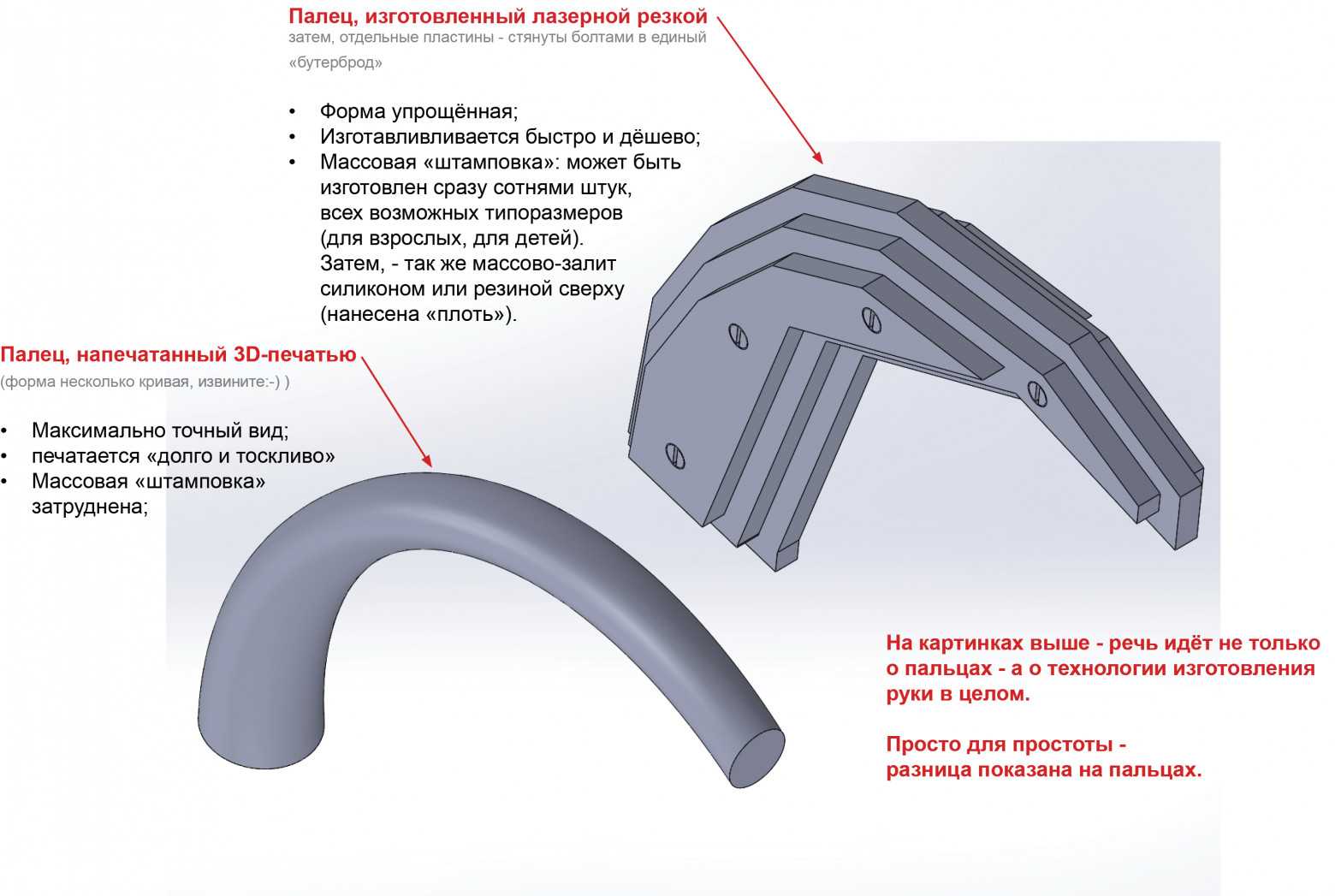
Таким образом, мы получаем достаточно дешёвый, легко воспроизводимый в массовых количествах протез руки, который может быть подвергнут в дальнейшем следующему «улучшайзингу»: изготавливается несколько литейных форм, в которых этот каркас руки покрывается, например, резиной.
Изготовление литейных форм очень простое. Если вкратце: делается гипсовая модель, потом заливается силиконом, потом силикон разрезается по периметру, и гипс извлекается. Вуаля — форма готова для приёма механической руки, чтобы «одеть» её в резиновую кожу.
Заливка происходит достаточно быстро, и это позволяет производить подобные руки очень просто и недорого.
Что же касается приводов этой руки, то, как можно видеть по большинству конструкций, представленных в сети Интернет, в них чаще всего используют сервоприводы, могущие поворачиваться на определённый угол, и удерживать его. Однако самодельные конструкции, как правило, стараются строить «по пути наименьшего сопротивления», который не учитывает ненадёжность сервоприводов, так как у них происходит достаточно быстрый износ потенциометра, и он начинает шуметь (дребезжать при удержании угла, не может повернуться на нужный угол и т.д.). Кроме того, использование сервопривода, на взгляд автора, является добровольным отказом от миниатюрности, что в общем случае — не есть хорошо.
Как альтернативу сервоприводам, можно было бы предложить использовать миниатюрные мощные электродвигатели с металлическим редуктором, широко применяющиеся в качестве приводов миниатюрной самодельной робототехники. Это так называемая «серия приводов N20» (гуглить «n20 gear motor») — картинка увеличивается, кликабельно:
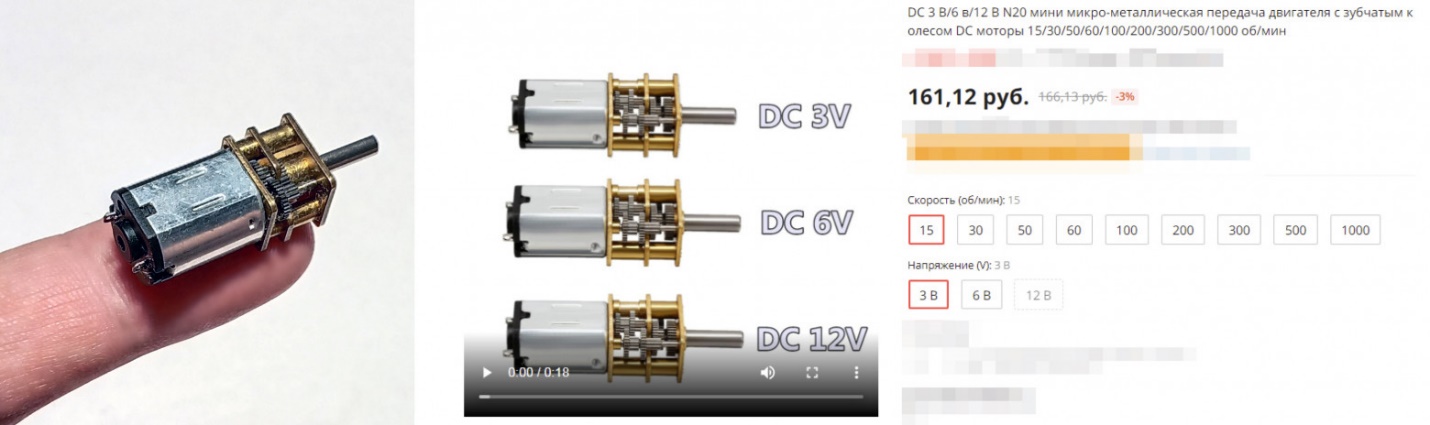
На левой картинке — двигатель положен на указательный палец руки (для понимания его размера)
Подобные двигатели выпускаются довольно широкой линейкой, дифференцированной как по усилию на выходном валу редуктора, так и по питающему напряжению. Они являются весьма мощными, несмотря на их малый размер, — их мощность на выходном валу может достигать 3 кг и более.
Да, они не позволяют устанавливать и удерживать определённый угол, однако их мощь и миниатюрность могут сослужить хорошую службу (если мы привнесём в конструкцию дополнительный аналоговый датчик Холла (как именно его расположить, — зависит от вашей конструкции и выдумки в целом).
Таким образом, на выходе мы получаем устройство, которое сочетает как плюсы сервопривода (то есть может удерживать определённый угол поворота вообще без износа потенциометра — его тут даже и нет), так и исключает его минусы (в отличие от сервопривода устройство является весьма миниатюрным).
Их единственным минусом является то, что они коллекторные. Хотя, если сделать к ним удобный доступ для обслуживания и плюс, если учесть их розничную цену… В общем, это всё неважно :-)
Ещё одним очень интересным способом привода, который, как мне кажется, ещё никто не применял, может быть использование цилиндрического линейного двигателя, о котором я рассказывал в одной из предыдущих статей.
Так как для привода пальцев нужен, по сути, линейный привод (если мы возьмём за основу природное решение и будем приводить пальцы в движение с помощью тросов), то, необходимо будет только натягивать тросы (которые будут играть роль сухожилий у настоящей руки). Линейный двигатель для этого подходит как нельзя лучше: по сути, он будет представлять собой компактный «пучок палочек», расположенных в руке, которые движутся бесшумно, мощно, сверхбыстро (а если нужно — очень плавно и медленно) и весьма точно (напомню, что линейные двигатели подобного типа используются для smd-монтажа электронных компонентов, а из этого вы сами можете посудить о точности устройства).