Файл: Хотя периодически и появляются интересные стартапы, которые пытаются переломить эту тенденцию.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 19
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
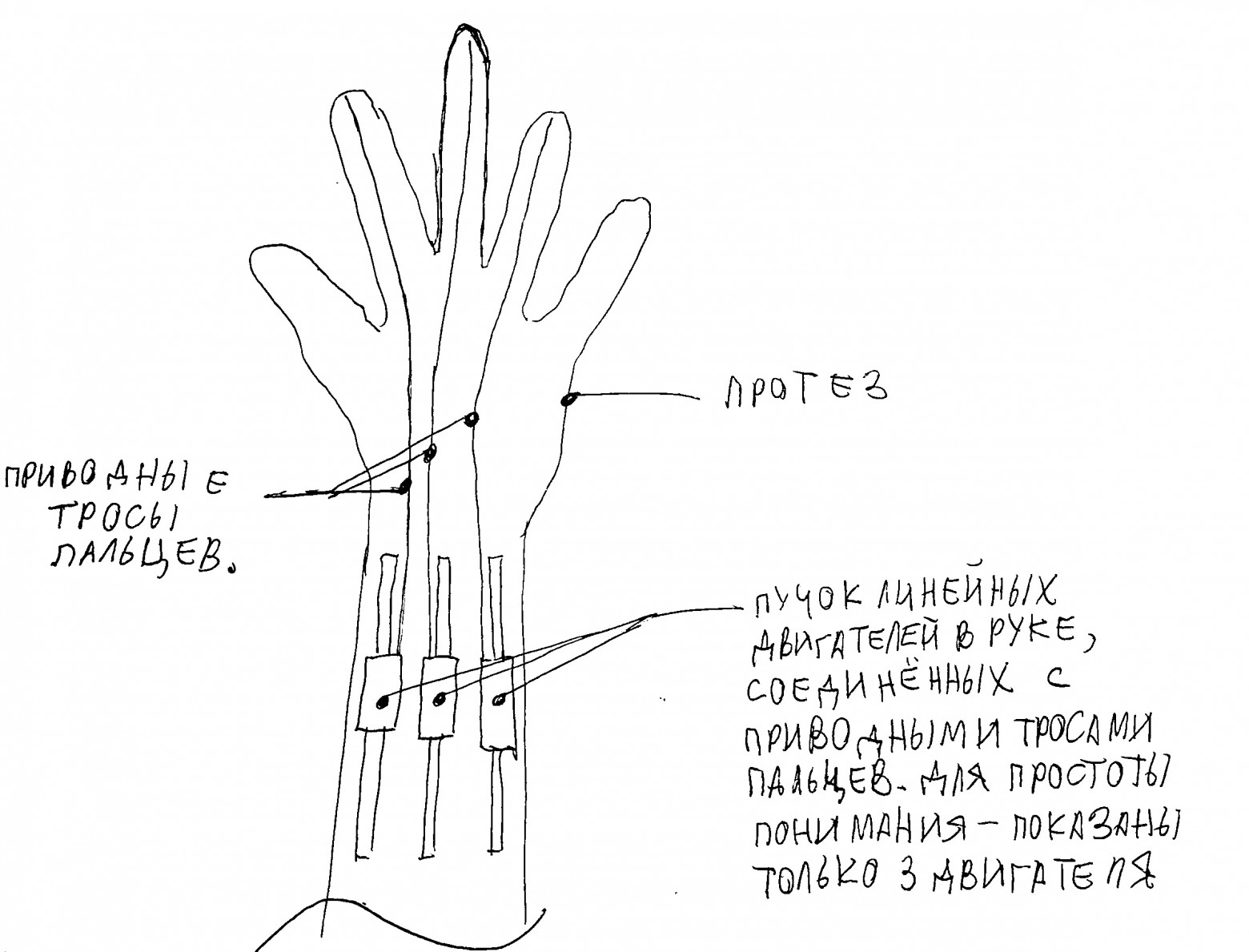
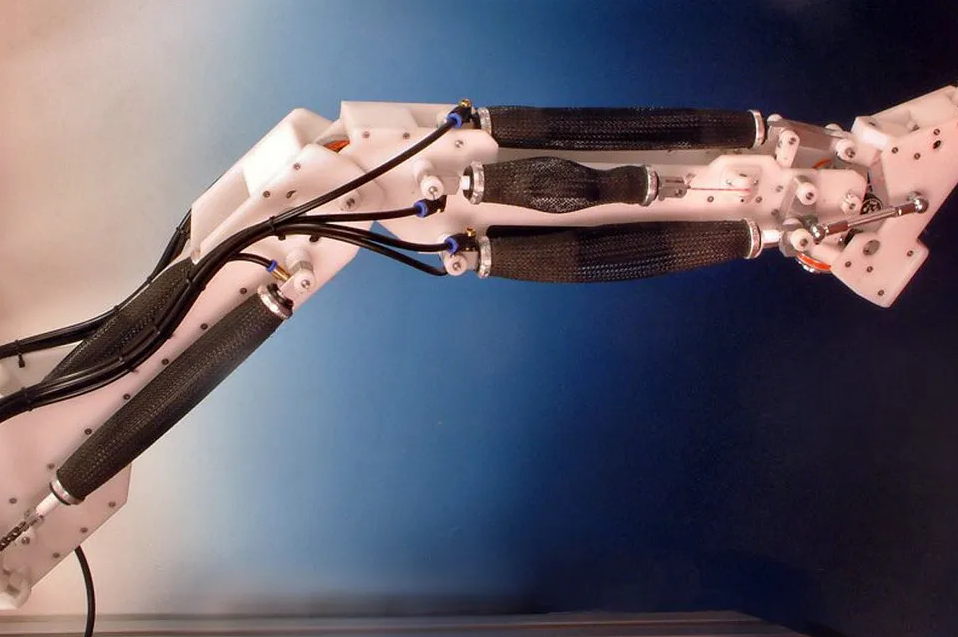
Применение такого подхода будет очень близким к настоящим мышцам, которые учёные пока пытаются имитировать с применением различных подходов, например, пневматического:
Картинка: hisour.com

Картинка: pngwing.com
Что же касается управления всем этим устройством, то на данный момент и судя по анализу разработок, наиболее перспективным вариантом видится единственный: электромиография, — использование электрических импульсов остатков мышц на культе. У этого подхода есть, конечно, и свои минусы, которые связаны с тем, что со временем эти остатки мышц начинают атрофироваться и считать их сигнал становится всё сложнее. Учёные работают над этим вопросом, однако, этот подход наиболее применим в текущее время.
Для считывания данных с датчиков (с применением этого подхода), можно использовать модуль AD620, который может быть подключён к микроконтроллерам семейства Arduino.
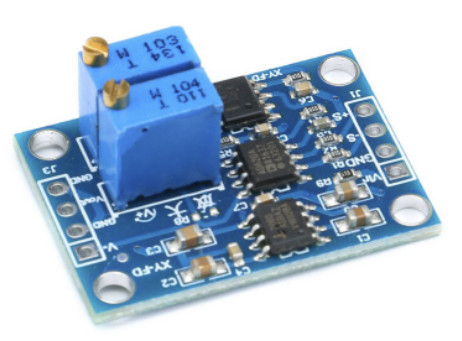
Подробный разбор работы с этой платой и образец кода можно найти вот по этой ссылке.
Подытоживая рассказ, отметим, что максимальное использование существующих готовых деталей (когда мы сначала не проектируем устройство, а потом уже подбираем под него комплекс деталей; а идём, наоборот, — сначала подбираем весь комплекс деталей (смотрим, что есть в наличии готового), и уже под найденное — проектируем устройство), использование скоростных методов производства, дешёвой готовой электроники, вроде Arduino или esp32 позволяет, на мой взгляд, разработать и начать производить в массовом порядке робокомплекты бионических рук.
В данном рассказе я постарался остановиться только на концептуальных моментах, которые, лично мне, просто бросаются в глаза.
Надеюсь, этот рассказ был для вас интересен и полезен!