ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 44
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Допустим, что расширение
 в три раза в данном случае является экономически обоснованным, в связи с чем число групп n равно 3.
в три раза в данном случае является экономически обоснованным, в связи с чем число групп n равно 3.Таким образом,

При расчете допусков должно быть соблюдено условие:
где
 и
и  обозначены условно допуски увеличивающих и уменьшающих звеньев.
обозначены условно допуски увеличивающих и уменьшающих звеньев.Согласно этому условию:

Отсюда:

Сообразуясь со степенью сложности изготовления деталей, установим групповые допуски

Устанавливаем поля допусков и координаты их середин для деталей каждой группы (таблица 1). При назначении координат середины полей допусков уравнение должно быть следующего вида:

Таблица 1
| |  |  |  |  |  |  |  |  |  |  | |  |
| I | 0,2 | -0,24 | 0,1 | -0,1 | 0,02 | -0,01 | 0,03 | 0,09 | 0,05 | -0,02 | 0,4 | 0,2 |
| II | 0,2 | -0,04 | 0,1 | 0 | 0,02 | 0,01 | 0,03 | 0,12 | 0,05 | 0,03 | 0,4 | 0,2 |
| III | 0,2 | 0,16 | 0,1 | 0,1 | 0,02 | 0,03 | 0,03 | 0,15 | 0,05 | 0,08 | 0,4 | 0,2 |
Две последние колонки таблицы показывают, что при соединении деталей в каждой из групп требуемые пределы зазора будут обеспечены.
Предельные отклонения размеров составляющих звеньев приведены в таблице 2.
Таблица 2
| Группа |  |  |  |  |  |
| I |  |  |  |  |  |
| II |  |  |  |  |  |
| III |  |  |  |  |  |
Таким образом, для обеспечения групповой взаимозаменяемости необходимо изготовить детали со следующими предельными отклонениями:

4 Метод пригонки
Для достижения требуемой точности зазора методом пригонки выберем в качестве компенсирующего звена размера
 регулирующего кольца, изменение которого проще всего осуществить.
регулирующего кольца, изменение которого проще всего осуществить.Установим на составляющие звенья экономически целесообразные значения полей допусков и координаты их середин.
Тогда производственный допуск замыкающего звена расширится до величины:

Наибольшая величина компенсации может быть равной:

Для того, чтобы создать на звене
необходимый для пригонки слой материала, в координату середины полядопуска этого звена следует ввести поправку  :
:
Поэтому следует установить:

Предельные отклонения размеров составляющих звеньев:


5 Метод регулирования с применением неподвижного компенсатора
Выберем в качестве компенсатора то же звено, что было взято при решении задачи по методу пригонки, и установим следующие допуски

0,4 – для звена
 ;
;0,3 – для звена
 ;
;0,05 – для звена
 ;
;0,1 – для звена
 ;
;0,15 – для звена
 ;
;В размерной цепи К (рисунок 1) компенсации подлежат отклонения звеньев
 которые в сумме могут составлять:
которые в сумме могут составлять:
В соответствии с этим наибольшая величина компенсации будет:

Найдем число ступеней компенсаторов N:
С целью упрощения расчета размеров компенсаторов рекомендуется назначать координаты середин полей допусков составляющих звеньев так, чтобы совместить одну из границ расширенного поля допуска замыкающего звена с соответствующей границей его поля допуска заданного служебным назначением изделия.
В связи с этим при совмещении нижних границ полей допусков замыкающего звена (рисунок 2) необходимо соблюдать условие:
 ;
; ;
;
Поскольку компенсации подлежат отклонения звеньев
 , то в расчете координат середин полей допусков компенсатор участвовать не должен.
, то в расчете координат середин полей допусков компенсатор участвовать не должен.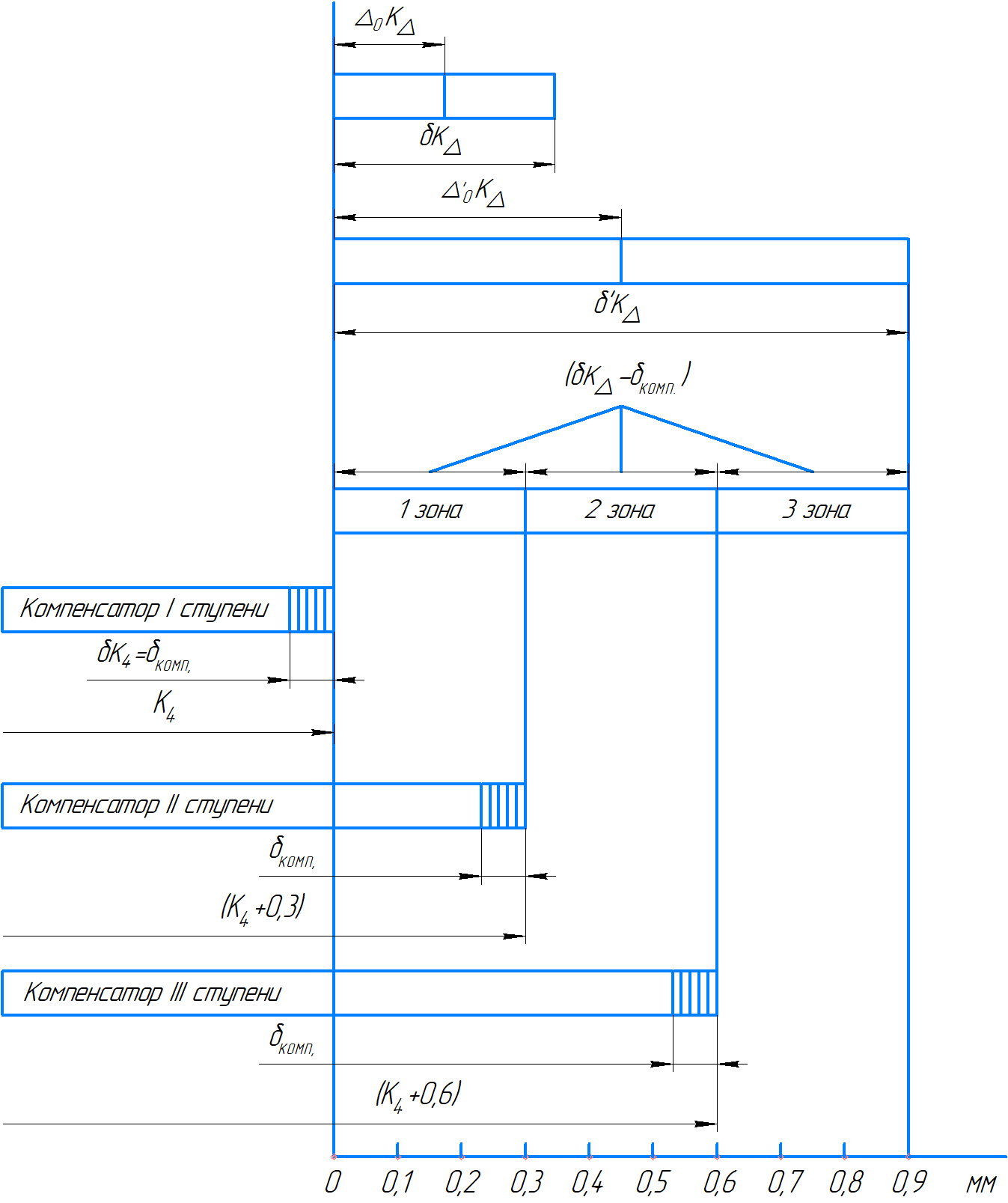
Рисунок 2
Координата середины его поля допуска должна быть установлена независимо от координат середин полей допусков составляющих звеньев
. С целью упрощения расчета размеров компенсаторов рекомендуется задавать координату середины поля допуска компенсирующего звена равной половине его поля допуска со знаком минус.В данной задаче:

Таким образом,

Установим:

При установленных координатах середин полей допусков звеньев
поле допуска  займет относительно заданного поля допуска положение, показанное на рисунке 2.
займет относительно заданного поля допуска положение, показанное на рисунке 2.При величине ступени компенсации, равной:

и числе групп компенсаторов
 , поле производственного допуска будет разбито на три зоны с границами, показанными на рисунке 2. Отклонения, возникающие в пределах той или иной зоны, должны компенсироваться путем постановки в изделие соответствующего регулирующего кольца (компенсатора).
, поле производственного допуска будет разбито на три зоны с границами, показанными на рисунке 2. Отклонения, возникающие в пределах той или иной зоны, должны компенсироваться путем постановки в изделие соответствующего регулирующего кольца (компенсатора).
Размер компенсатора первой ступени равен его номинальному размеру. Размеры компенсаторов каждой следующей ступени будут отличаться от размеров компенсаторов предшествующей ступени на величину ступени компенсации.
С учетом допуска на изготовление компенсаторов их размеры будут:


При задании размеров компенсаторов разницу в номиналах целесообразно перенести на координаты середин полей их допусков. Тогда отклонения размера
должны быть равны:


На рисунке 2 можно видеть, как осуществляется компенсация отклонений, находящихся в различных зонах
 .
.Если координаты середин полей допусков составляющих звеньев
установлены произвольно, при определении размера компенсаторов первой ступени необходимо внести поправку в координату середины поля допуска компенсирующего звена:
где
причем значения
 установлены произвольно.
установлены произвольно.Если компенсатор является увеличивающим звеном, поправку
 вносят со своим знаком, а если уменьшающим звеном – с противоположным знаком.
вносят со своим знаком, а если уменьшающим звеном – с противоположным знаком.Вывод: в ходе работы была освоена методика размерного анализа конструкции, освоены навыки расчета размерной цепи для всех пяти методов достижения точности замыкающего звена.
ПРАКТИЧЕСКАЯ РАБОТА № 4
ПРОЕКТИРОВАНИЕ МАРШРУТНЫХ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ СБОРКИ УЗЛОВ И МАШИН
Цель работы – приобретение навыков в области проектирования технологических процессов сборки узлов и машин; оценка влияния конструктивных особенностей узлов на состав и последовательность сборочных операций; обеспечение требуемых показателей качества.