Файл: 1. Структурный анализ механизмов 1 Структурный анализ механизма 1.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 16
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
1. Структурный анализ механизмов
1.1 Структурный анализ механизма №1
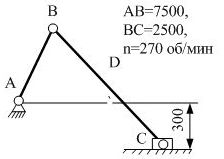
В состав плоского многозвенного механизма №1 входят следующие звенья:
Звено1 – кривошип (полнооборотное вращательное движение);
Звено 2 – шатун (сложное плоскопараллельное движение и образующее кинематические пары только с подвижными звеньями);
Звено 3 – ползун (возвратно-поступательное движение);
Звено 4 – стойка (неподвижна).
Таким образом, количество подвижных звеньев n=3.
Звенья механизма образуют кинематические пары. Для определения количества кинематических пар, входящих в состав механизма №1 заполним таблицу 1, где для каждой кинематической пары определим ее класс и вид.
Таблица 1 Классификация кинематических пар механизма №1
| № | Изображение кинематических пар | Классы кинематических пар | Виды кинематических пар |
| 1 |  | 5 | Вращательная |
| 2 |  | 5 | Вращательная |
| 3 |  | 5 | Вращательная |
| 4 |  | 5 | Поступательная |
Таким образом, количество кинематических пар пятого класса p5=4, четвертого класса p4=0.
Определим степень подвижности механизма №1 по формуле П.Л. Чебышева:
W=3∙n – 2∙p5 – p4 (1)
где n – количество подвижных звеньев механизма, n = 3;
p4 – количество кинематических пар 4 класса, p
4 =0 ;
p5 – количество кинематических пар 5 класса, p5=4.
W = 3×3 – 2×4=1.
Поскольку степень подвижности механизма W=1, то данный механизм подвижен, не имеет лишних связей.
2. Построение механизмов в масштабе
2.1 Построение механизма №1 в масштабе
Для построения механизма на листе формата А4 необходимо подобрать масштаб. Для этого переводим заданные размеры звеньев механизма №1 в метры:


Масштаба построения механизма №1 будет определяться следующим образом:
После определения масштабного коэффициента механизма №1 перейдем к определению длин всех его звеньев в масштабе:
 ;
;  ;
; 
Далее проводим построение механизма №1 в заданном положении на листе формата А4
3 Определение скоростей шарниров механизмов
3.1 Определение скоростей шарниров механизма №1
Для определения скоростей шарниров механизма используем графоаналитический метод.
В принятом масштабе μL = 20 мм/м кинематическая схема механизма (план механизма) при φ = 60º для анализа изображена на рисунке ___, приложения ___. Планы скоростей (рис. ___) и ускорений (рис. ____) построены там же.
Рассмотрим определение линейной скорости точек В, С; угловой скорости шатунa и их направления.
Линейные скорости точек Vi механизма определяем из плана скоростей, который строится из полюса плана P в масштабе μV = Vi / Li, где Li - длина отрезка в мм, изображающая скорость точки Vi на плане. Скорость точки B: VB =
 ×
× 
= ((3,14×270)/30) × 2,5 = 70,65 м/с. ;n = 270 об/мин.
Вектор ͞VB приложен в точке B перпендикулярно звену 1 и направлен в сторону его вращения.
Определим масштаб плана скоростей:
На плане скорость ͞VB изображается отрезком pb = VB / μV,
μV = VB / pb = 70,65/40 = 1,8
 отложенным из полюса планаpV (рис. ___). Скорость неподвижной точки А:VA = 0. Для определения скорости точки B используем векторное уравнение:
отложенным из полюса планаpV (рис. ___). Скорость неподвижной точки А:VA = 0. Для определения скорости точки B используем векторное уравнение:͞VС = ͞VB + ͞VCB , где͞VCB - относительная скорость точки С при вращении вокруг точки В, направлена перпендикулярно звену ВС. Тогда
VC = μV×͞pc = 1,8 × 42 = 75,6 м/с.
VCB = μV×͞bc = 1,8 × 21 = 37,8 м/с.
Все найденные вектора скоростей шарниров механизма представим на соответствующем плане скоростей механизма №1.
4 Определение угловых скоростей звеньев механизмов
Для определения угловых скоростей звеньев механизма находим значения переносных скоростей данных звеньев графическим методом. Для этого длины векторов переносных скоростей данных звеньев умножаем на значение масштаба плана скоростей. Полученное значение переносной скорости соотносим с заданными длинами звеньев.
4.1 Определение угловых скоростей звеньев механизма №1
Определим угловую скорость вращения кривошипа:
Угловая скорость звена АВ (кривошипа):
ωAB = =
 =
=  = 28,8 с-1;
= 28,8 с-1; Угловая скорость звена ВС (шатуна):
ωBC = =
 =
=  = 5,04 с-1;
= 5,04 с-1; 5 Определение ускорений шарниров механизмов
5.1 Определение ускорений шарниров механизма №1
Аналогично определению скоростей точек шарниров многозвенного механизма, воспользуемся графоаналитическим методом.
Линейные ускорения характерных точек механизмов (В, С) определяются из плана ускорений, который строится в выбранном масштабе.
Ускорения точки А: аа = 0.
Ускорение точки В: Так как, звено 1 (АВ) вращается равномерно (ωАВ = 28,8с-1 = const), то точка В имеет только нормальное ускорение:
аb= (
 )2 ×
)2 ×  = (
= (  )2 × 2,5 = 1996,6 м/с2
)2 × 2,5 = 1996,6 м/с2Определим масштаб плана ускорений:
μа= аb / pb = 1996,6 / 60 = 33,3

План ускорений строится по аналогии с планом скоростей, с использованием векторного уравнения:
͞ac = ͞ab+ ͞acb = ͞ab+ ͞acbn+ ͞acbτ ,
где ͞ac
 АС, ͞ab АB, ͞acbn CB, acbτ ┴ CB.
АС, ͞ab АB, ͞acbn CB, acbτ ┴ CB.Нормальная составляющая acbn равна:
͞acbn = ωBC2×LBC = 5,042 × 7,5 = 190,5 м/с2 и направлена вдоль линии СВ к центру вращения в точке В.
В масштабе μа= 33,3
отрезок, изображающий нормальное ускорение ͞acbn на плане представлен: ͞а'͞b' = ͞acbn / μа = 190,5/33,3 = 5,7мм.Согласно векторному уравнению из точки В´´ проводится линия действия тангенциальной составляющейacbτ относительного ускорения перпендикулярно линии ВА, а из полюса ра – линия действия абсолютного ускорения точки В параллельно линии ОВ. Точка пересечения этих линий В´ определяет вектор ускорения ͞ac .
Измерив по плану ускорений соответствующие отрезки, получим:
ac = ͞pa͞b' × μа = 17,3 × 33,3 = 576 м/с2
acbτ = а'͞b'× μа = 51,5 × 33,3 = 1715 м/с2.
Все найденные вектора ускорений шарниров механизма представим на соответствующем плане ускорений механизма №1 (прил. _____, рис.___)
6 Определение угловых ускорений звеньев механизмов
Для определения угловых ускорений звеньев механизма находим значения касательных ускорений данных звеньев графическим методом. Для этого длины векторов касательных ускорений данных звеньев умножаем на значение масштаба плана ускорений. Полученное значение касательного ускорения соотносим с заданными длинами звеньев.
6.1 Определение угловых ускорений звеньев механизма №1
Угловое ускорение звена АВ (кривошипа):
 .
.Величина углового ускорения звена ВС (шатуна) 2 определяется по формуле:
ε = acbτ / LBC = 1715 / 7,5 = 228,7 рад/с2.